
Dans cet article je vais vous faire la présentation du bras manipulateur “Schrader” :
La fonction principale de ce système est de déplacer un objet dans l’espace, en utilisant de l’énergie pneumatique grâce aux différents vérins. (Ci-dessous)
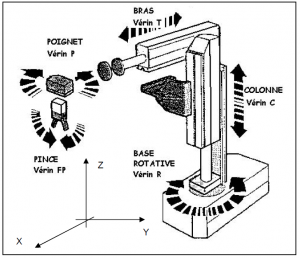
Les différents vérins sur le bras manipulateur
Source : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
Il a pour effectuer cela différentes fonctions principales ainsi que des contraintes : (Tableau et diagramme pieuvre ci-dessous)
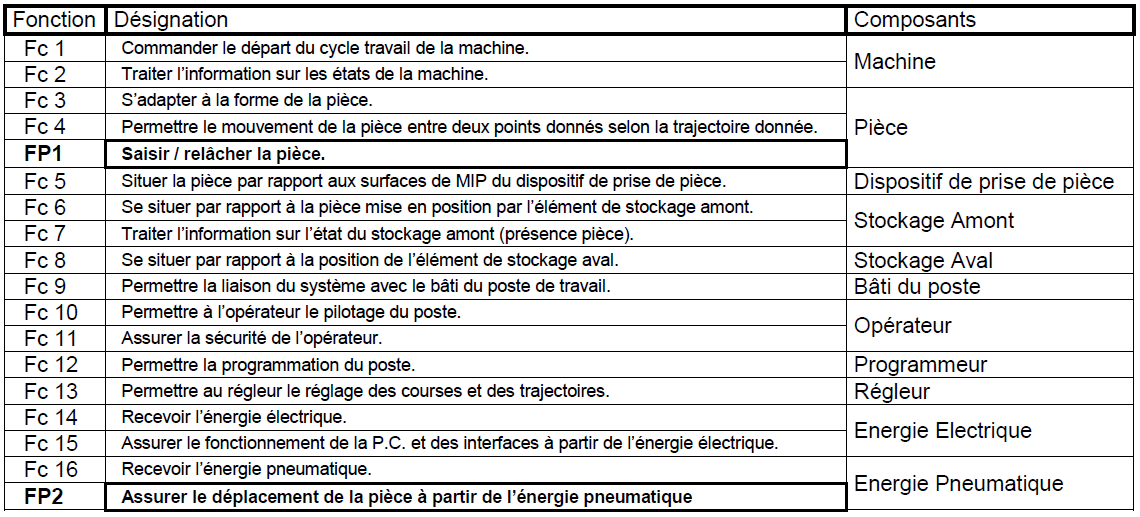
Tableau des différentes fonctions principales et les contraintes.
Sources : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
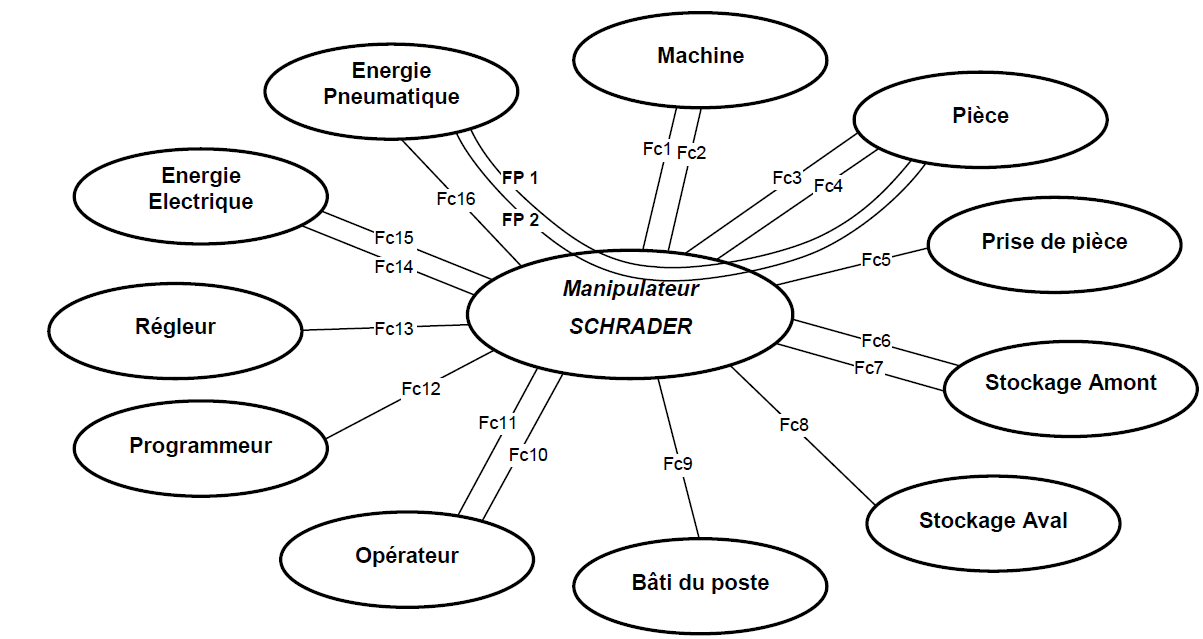
Diagramme pieuvre du manipulateur SCHRADER
Source : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
Sources : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
Et voici ci-dessous l’architecture fonctionnelle du bras manipulateur. En rouge la chaîne d’énergie, en bleu la chaîne d’information.

Source : Lp2i
Et pour finir http://www.youtube.com/watch?v=G2b8quDijao une vidéo du bras en marche.