
Au cours de ce TP ayant pour thème divers types de capteurs, nous avons été amenés à étudier le fonctionnement de deux d’entre eux. Voici le compte-rendu de notre travail.
I) Capteur de champs magnétiques
Ce capteur se présente sous la forme d’une plaque proposant une entrée, une sortie, une borne terre et sur laquelle se trouvent une résistance et le capteur en lui-même.
1) Câblage réalisé :
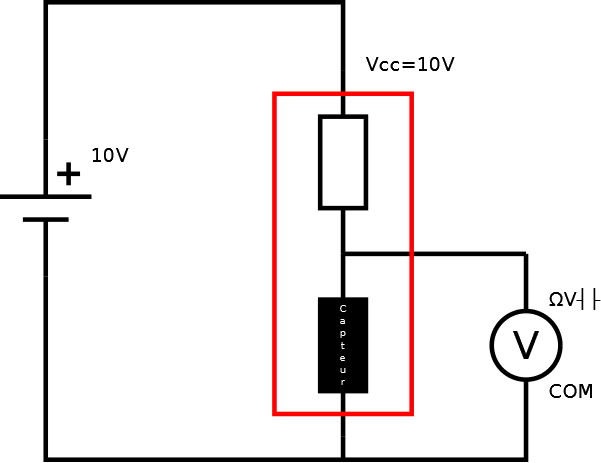
Source : LP2I
2) Essais effectués :
Pour trouver la (les) grandeur(s) physique auxquelles ce capteur est sensible, nous avons tenté d’approcher l’aimant qui nous a été fourni afin de voir si cela pouvait provoquer une variation du signal de sortie (la tension) Voici à peu près les résultats que nous avons obtenu :
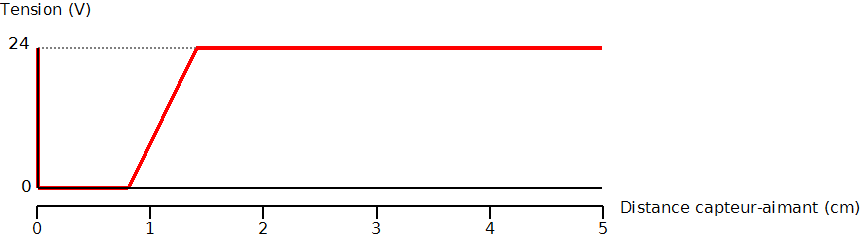
Source : LP2I
3) Conclusions tirées :
Les conclusions que nous avons pu tirer de ces observations sont que le capteur est sensible aux champs magnétique et à leur proximité (ce qui en fait logiquement un capteur de proximité). Bien qu’il n’y ai pas exactement deux valeurs, le comportement du capteur se rapproche pour beaucoup du tout ou rien, et nous pouvons donc considérer le signal de sortie comme étant un signal logique.
D’après le site http://philippe.berger2.free.fr, il s’agirait d’un capteur ILS (Interrupteur à Lame Souple) comme celui montré ci-dessous, dont la commutation est provoquée par la présence d’un aimant sous la lame, qui ferme ainsi le contact du circuit.
Capteur ILS
Source : http://philippe.berger2.free.fr/
4) Utilisation possible dans un système :
Ce capteur pourrait par exemple être utilisé dans le store Somfy étudié en classe pour informer le système du fait que le store soit rentré ou non. En positionnant un aimant sur le store et le capteur près de l’enrouleur, il est possible de savoir si le store est rentré, et donc d’arrêter à temps l’enroulage du store.
II) Capteur de pression
Ce capteur se présente sous la forme d’un boitier proposant trois bornes et duquel sort une tige pivotante.
1) Câblage réalisé :
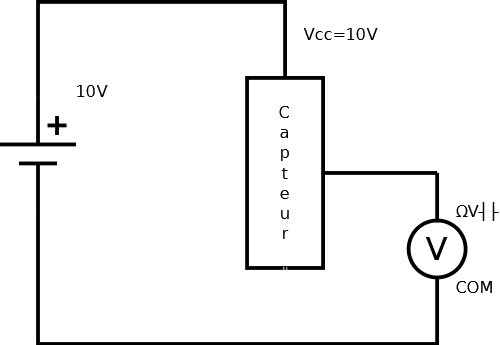
Source : LP2I
2) Essais effectués :
Pour tester le capteur, nous avons essayer d’exercer une pression d’intensité variable sur la tige afin de la faire pivoter. En l’amenant à différents angles de sa position de départ, Nous avons pu voir que le signal de sortie (une tension encore) diminuait brusquement une fois un certain seuil passé, passant de 24 à 0V. En augmentant encore la pression apportée sur la tige, nous avons même vu la pression devenir négative.
3) Conclusions tirées :
Suite à ces essais, nous pouvons déduire que le capteur est sensible aux forces mécaniques. Comme pour le capteur précédent, le signal de sortie ne prend pas exactement deux valeurs, mais le comportement du capteur se rapproche encore du tout ou rien, et l’on peut donc considérer ce nombre supplémentaire de valeur comme négligeable et considérer le signal de sortie comme logique.
D’après le site http://gcedidactic.free.fr/, il s’agit d’un capteur à contact, dont la tige pivotante serait ce que l’on appelle le “corps d’épreuve” chargé d’actionner l’élément de transduction qui transformera la grandeur à mesurer en une grandeur mesurable.
4) Utilisation possible dans un système :
Ce capteur pourrait être utilisé dans un système pour l’informer de la présence ou du passage d’un objet.