
Un Automate Programmable Industriel est un dispositif électronique programmable destiné à la commande de processus industriel pour un traitement séquentiel. Il envoie des ordres vers des préactionneurs (partie opérative) à partir de données d’entrée tels que des capteurs.
Problématique : Comment mettre en oeuvre un automate programmable industriel ?
Objectifs pédagogiques : Analyser le système
Identifier et caractériser les grandeurs agissant sur un système
Justifier le choix d’un protocole expérimental
Mettre en oeuvre un protocole expérimental
Le fonctionnement souhaité : L’objet doit se déplacer automatiquement entre deux positions en effectuant des aller-retours de manière cyclique tant que le bouton dcy (départ cycle) est activé.
Si le bouton dcy est désactivé, alors le cycle en cours peut se terminer normalement, mais un nouveau cycle ne commencera que lorsque dcy sera à nouveau activé.
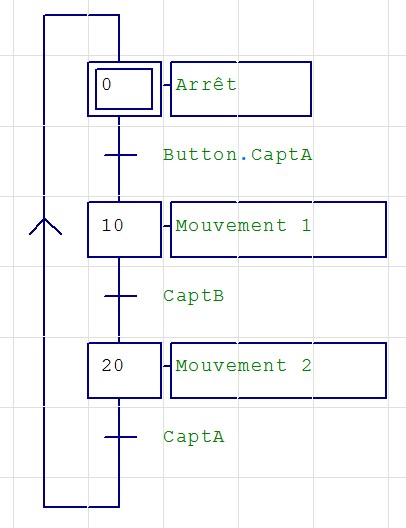
Pour réaliser le Grafcet, il faut que je détermine les capteurs. Nous faisons l’hypothèse que chaque position A et B est détectée par un capteur A et B. Je peux décrire sous forme de Grafcet le fonctionnement souhaité.
Source LP2I
Avec le logiciel Automgen
Nous avons choisi des capteurs de position de type poussoir qui permettent de détecter l’objet quand il est au point A et respectivement au point B. Nous pouvions aussi choisir un capteur de type reflex, mais nous trouvions qu’un capteur de position de type poussoir était plus facile à mettre en oeuvre.

Capteur à bouton poussoir
Source LP2I
Une fois notre grafcet établit à l’écrit, nous devions le créer par ordinateur via le logiciel Automgen.
Explication de notre Grafcet : Quand nous appuyons sur le bouton dcy et que le CaptA est actif, l’objet se déplace vers le point B. Le CaptB devient actif et c’est après cela que l’objet peut revenir au point A. Le captA redevient actif.
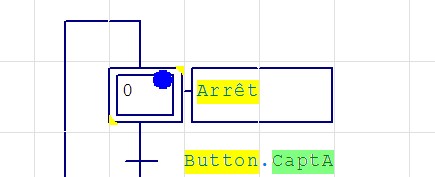
Avant de tester notre Grafcet sur l’Automate nous avons d’abord effectué une simulation via l’ordinateur.
Source LP2I
Avec le logiciel Automgen
C’est grâce à cette bille bleu que nous pouvons voir si notre programme fonctionne correctement. Au fur et à mesure que les transitions deviennent vraies, la bille bleu progresse.
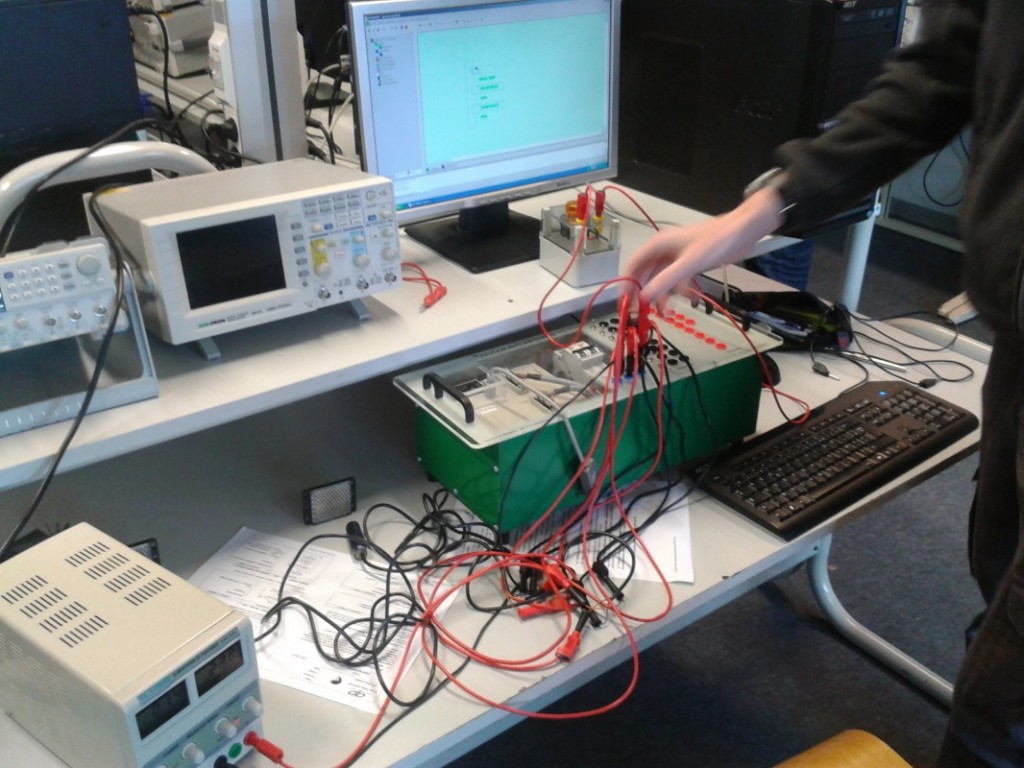
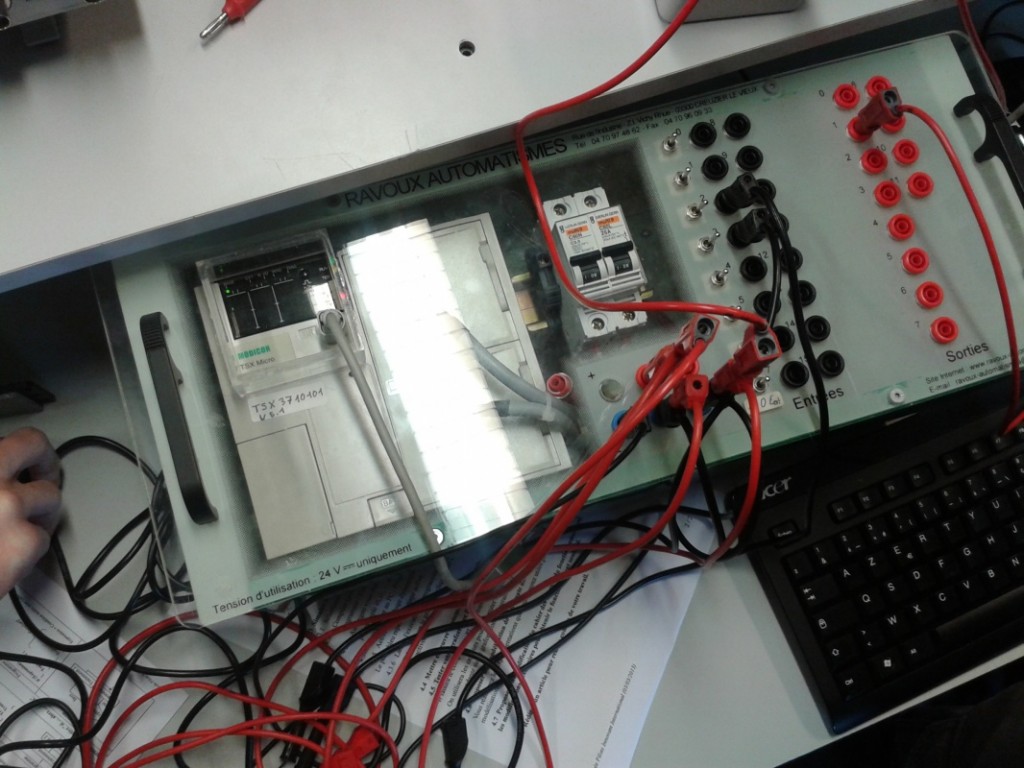
Une fois cette simulation effectuée et réussie, nous avons pu transférer le programme à l’Automate (après compilation). Nous avons donc fait nos branchements et nous avons pu le tester réellement.
Source LP2I
Source LP2I
Nous avons donc branché et relié l’Automate avec le PC pour nous permettre de compiler notre Grafet. Nous avons ensuite branché nos capteurs sur l’Automate. Nous lançons le programme depuis l’ordinateur et nous pouvons voir si avec l’action de nos capteurs, l’action s’effectue correctement.
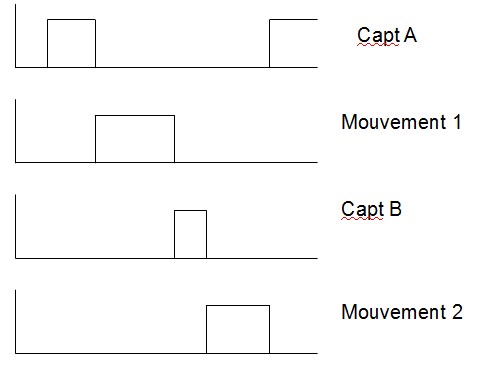
J’ai représenté mon Grafcet par ce chronogramme ci-dessous.
Source LP2I
Pour télécharger Automgen : http://www.irai.com/index_fichiers/irai_grafcet_simulationapi_virtual_commissionning_telechargement.htm
Pour avoir plus d’information : http://fr.wikipedia.org/wiki/Automate_programmable_industriel
http://alain.canduro.free.fr/API.htm
Pour un tutoriel sur Automgen : http://catice.ac-besancon.fr/sti/didacticiel/siteAII/