
Compte rendu de l’expérimentation sur le capteur de position (fin de course) de l’imprimante 3d Tobeca 2
figure 1
Les mesures aux bornes du capteur seul :
Avant d’effectuer nos mesures nous avons réalisé un schéma de câblage
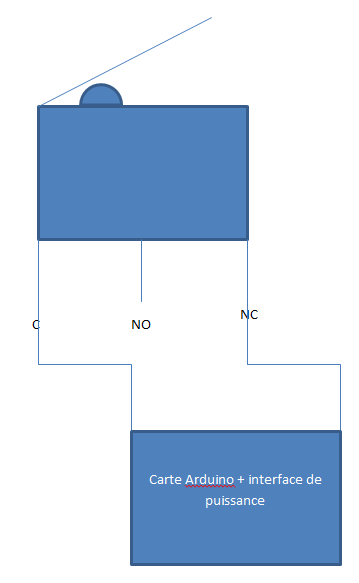
figure 2
D’après nos mesures aux bornes du capteur nous avons pu interpréter les chiffres relevés dans un tableau. Ces mesures ont pu être relevées grâce à un Multimètre.
| Position levier | U (V) | R (Ω) | Modélisation capteur entre c et NC |
| Relâché | 0 | 00.5 | Circuit ferméContact fermé au repos |
| Enfoncé | Pas stable (en l’air) | OL = R˃ 99 MΩ | Circuit ouvertContact ouvert en position travail |
Multimètre :
Il génère un courant I (avec son alim)
Il mesure I (A) et U (V)
Il calcul et affiche R = U÷I
OL = Overload = dépassement de la capacité de mesure c’est-à-dire R ˃ 99 MΩ
Puis on mesure U (t) avec un oscilloscope
Connecteur BNC
On observe un signal avec une période t = 20 ms soit une fréquence F = 1÷T = 1÷10-³ = 50 Hz
- Schéma électrique du capteur dans les deux positions entre C et NC
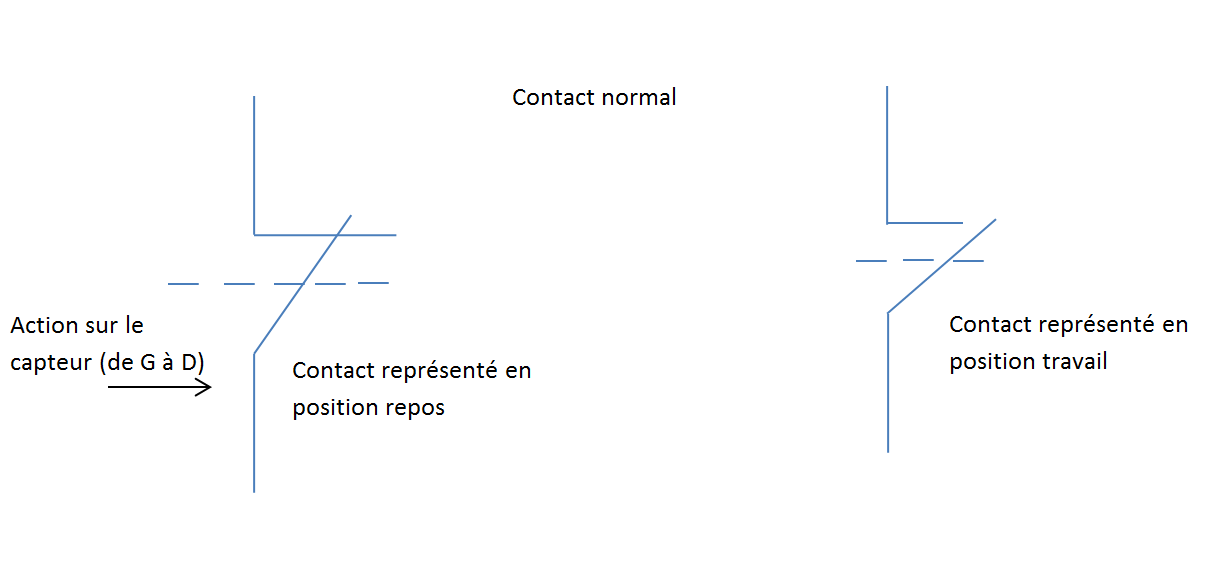
figure 3
- Schéma électrique du capteur entre C et NO
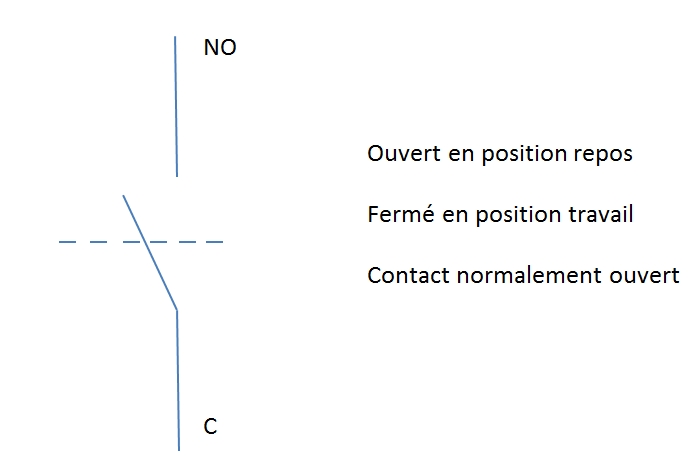
figure 4
- Schéma électrique équivalent du capteur avec ses 3 bornes.
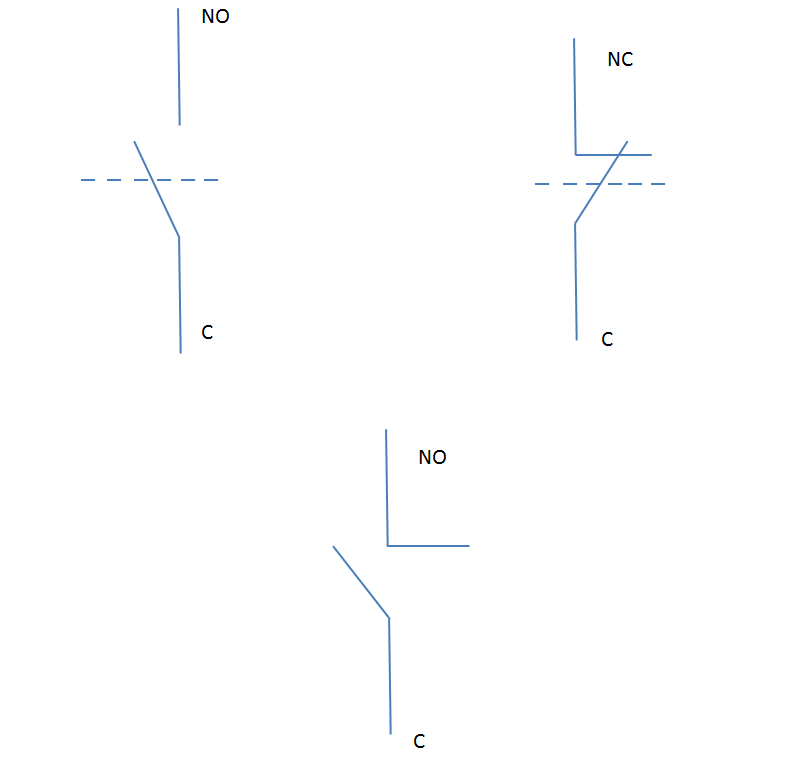
figure 5
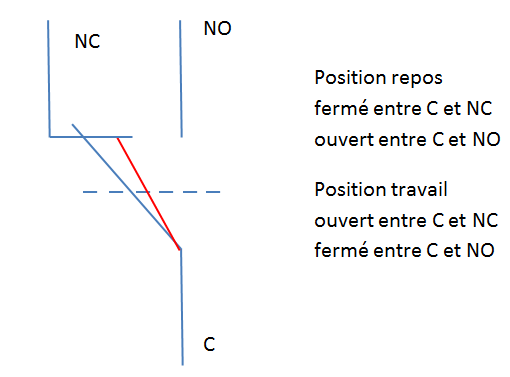
figure 6
Mesures sur le capteur sur l’imprimante 3D Tobeca :
figure 7
Nous allons mesurer la tension U (V) aux bornes du capteur fin de course / image de la position (fin de course atteint au pas).
- Schéma de câblage
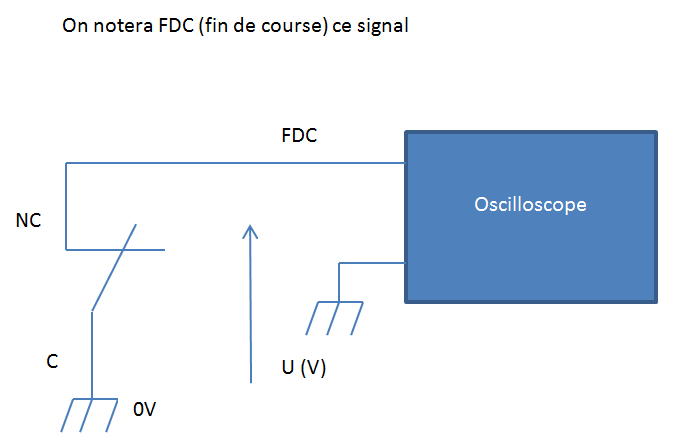
figure 8
- Tableau de mesures
| Etat levier | U = FDC (V) | Etat du contact, modélisation |
| Relâché | 0 | Contact fermé FDC = 0V car il est relié à la masse par le contact |
| Enfoncé | 4.7 | Contact ouvert |
- Modélisation du comportement
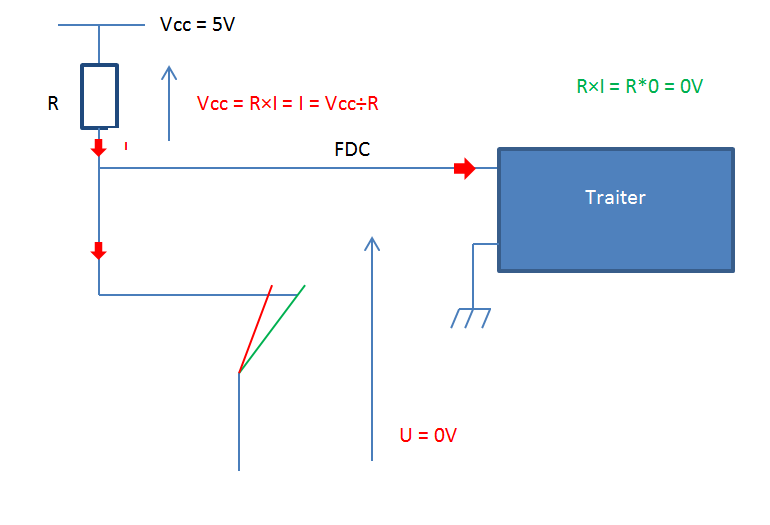
figure 9
Cette résistance R permet de ne pas avoir FDC en l’air quand le contact est ouvert. Elle tire FDC au plus de la lim. On l’appelle résistance de tirage au plus (pull up).
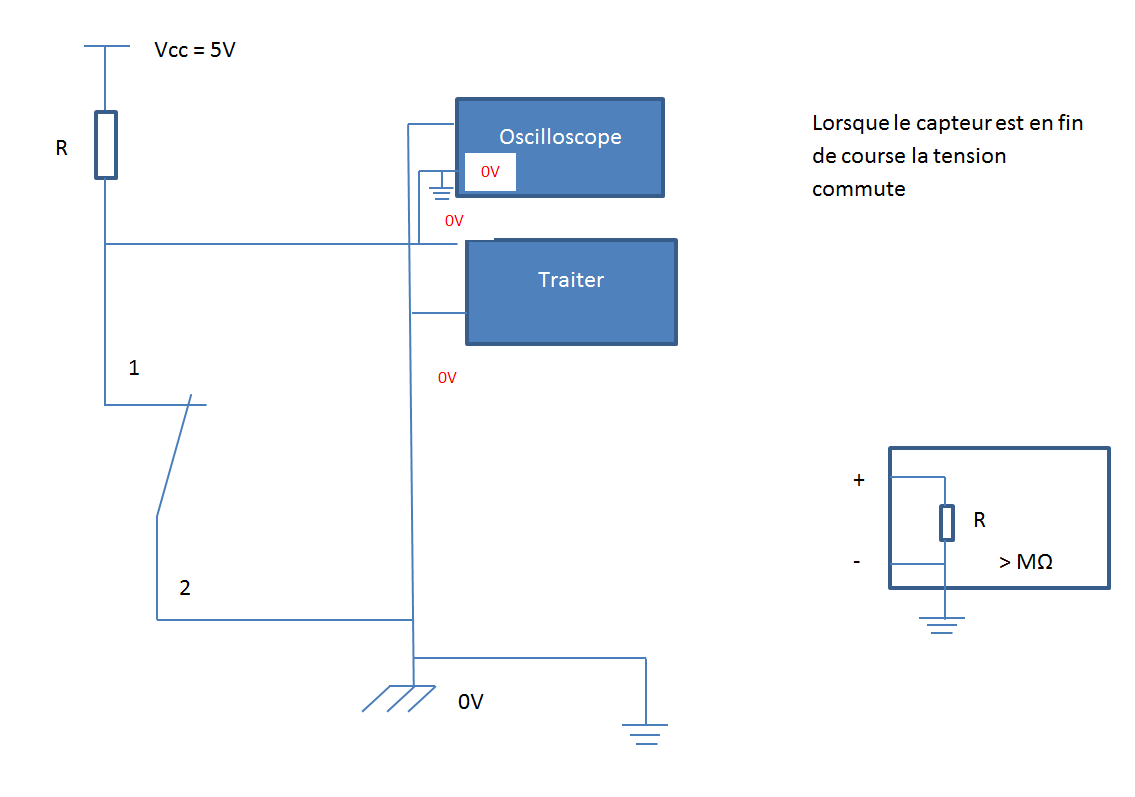
figure 10
Chronogramme
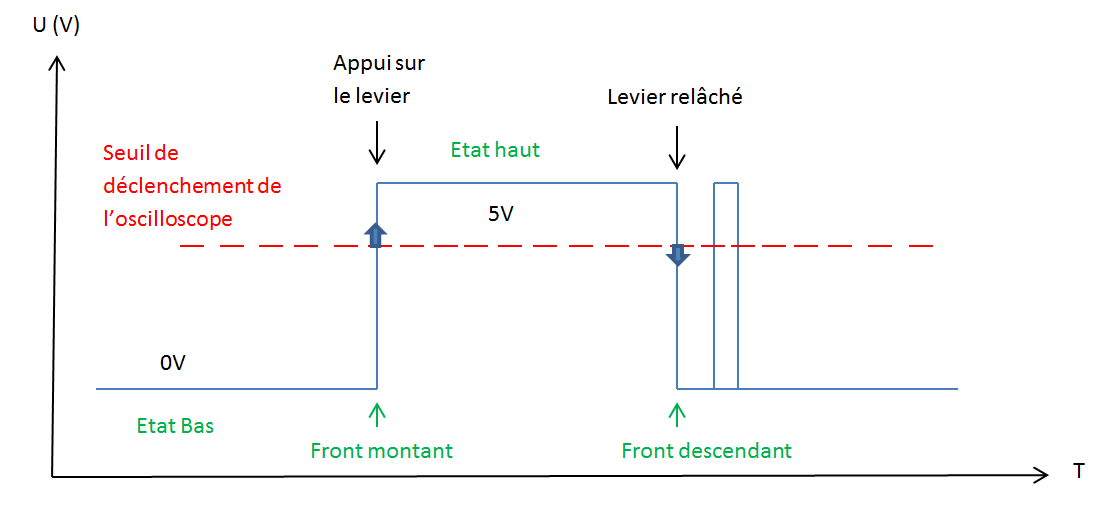
figure 11
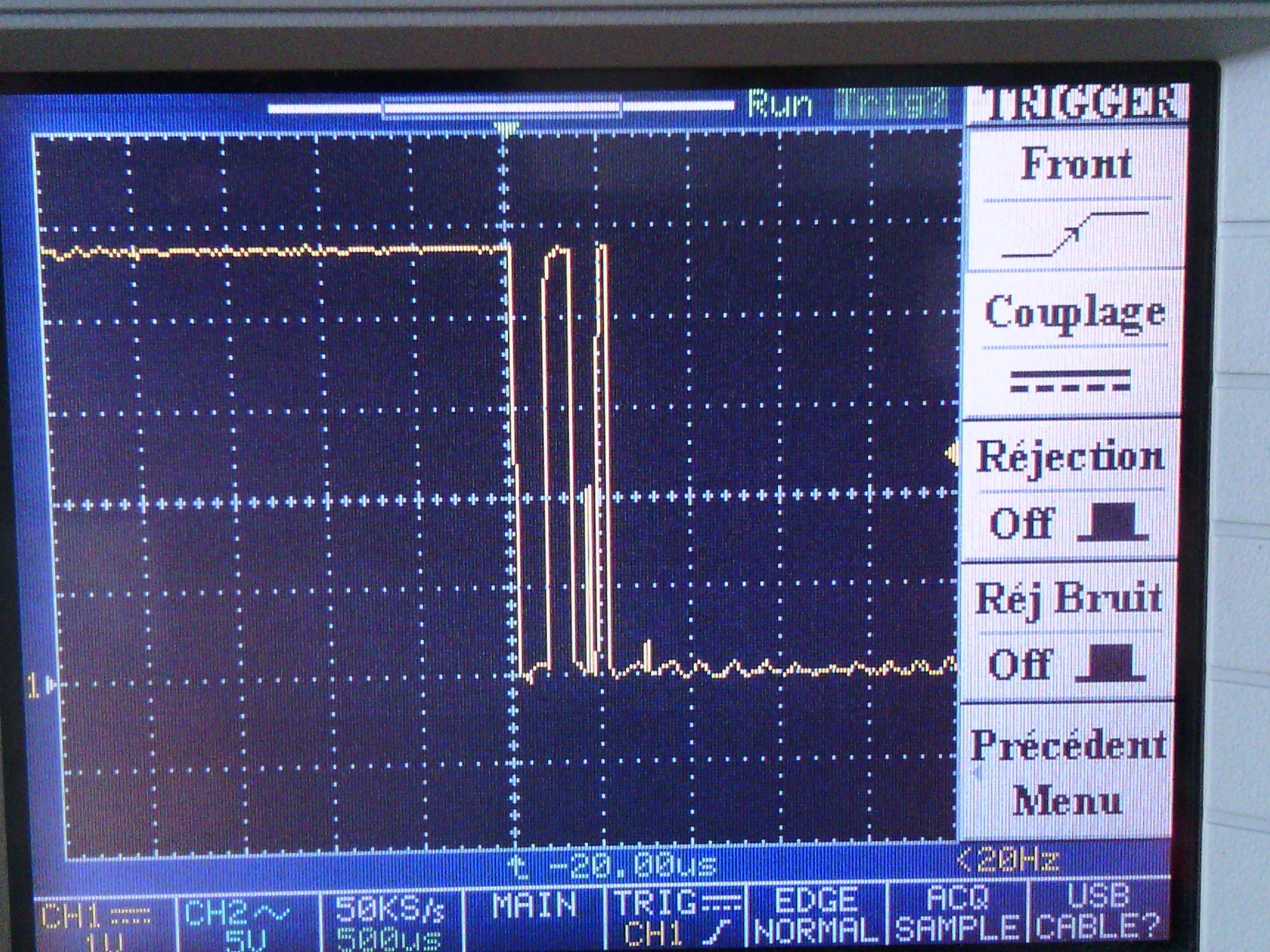
figure 12
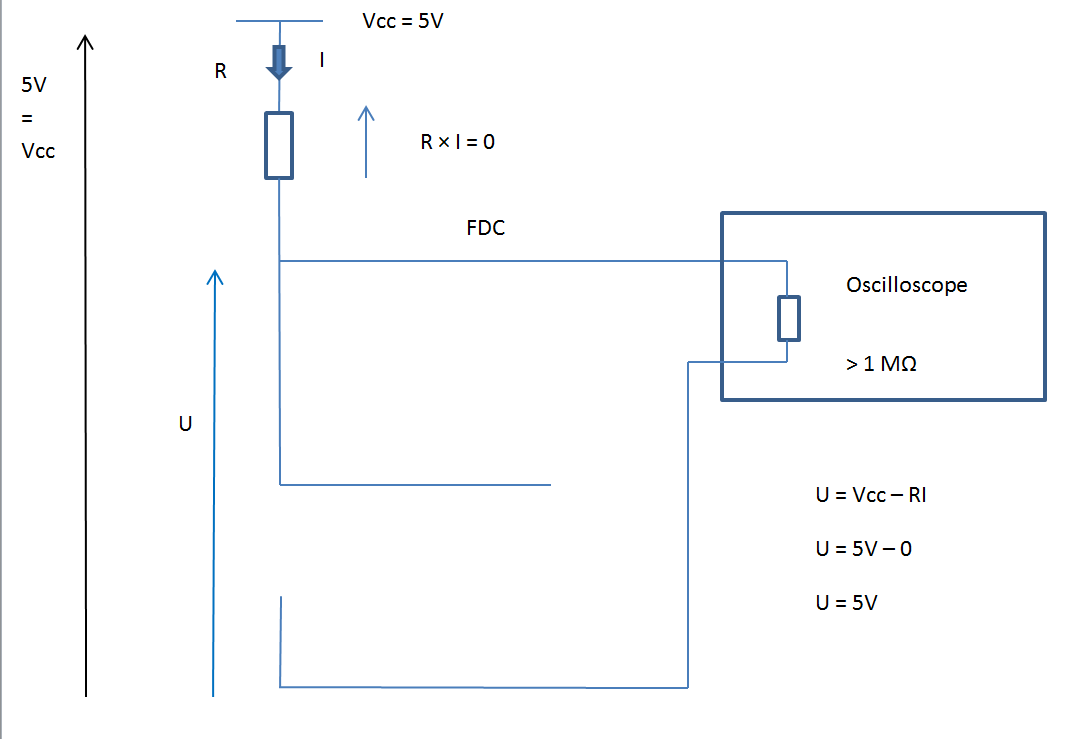
figure 13
Conclusion :
Un microrupteur type « fin de course » est un interrupteur utilisé pour les capteurs de contacts, pour les fins de courses. Il est équivalent à un interrupteur à trois positions.
Comme on a dit précédemment l’interrupteur est constitué de 3 trois pattes :
- Com (pour Commun)
- NC (pour Normaly Closed)
- NO (pour Normaly Open)
La patte Com est utilisée dans tous les cas, mais il faut choisir une seconde patte pour avoir un circuit totalement complet. Si on choisit No, on aura un circuit ouvert quand on ne pressera pas sur le poussoir et avec Nc le contraire.
Lors de certain changement de position, le matériaux rebondit ce qui crée des interférences. (voir figure 11)
Mesures sur un circuit de TEST :
Schéma de câblage :
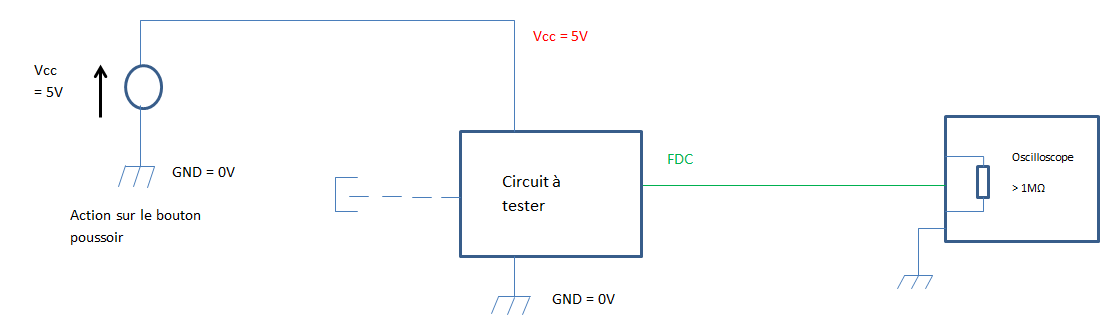
figure 14
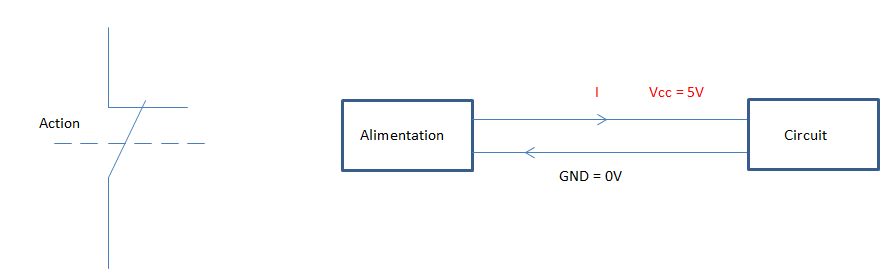
figure 15
Après avoir mis en œuvre le circuit sur une plaque d’essai (voir photo) nous avons relevez des mesures que nous avons mis dans un tableau
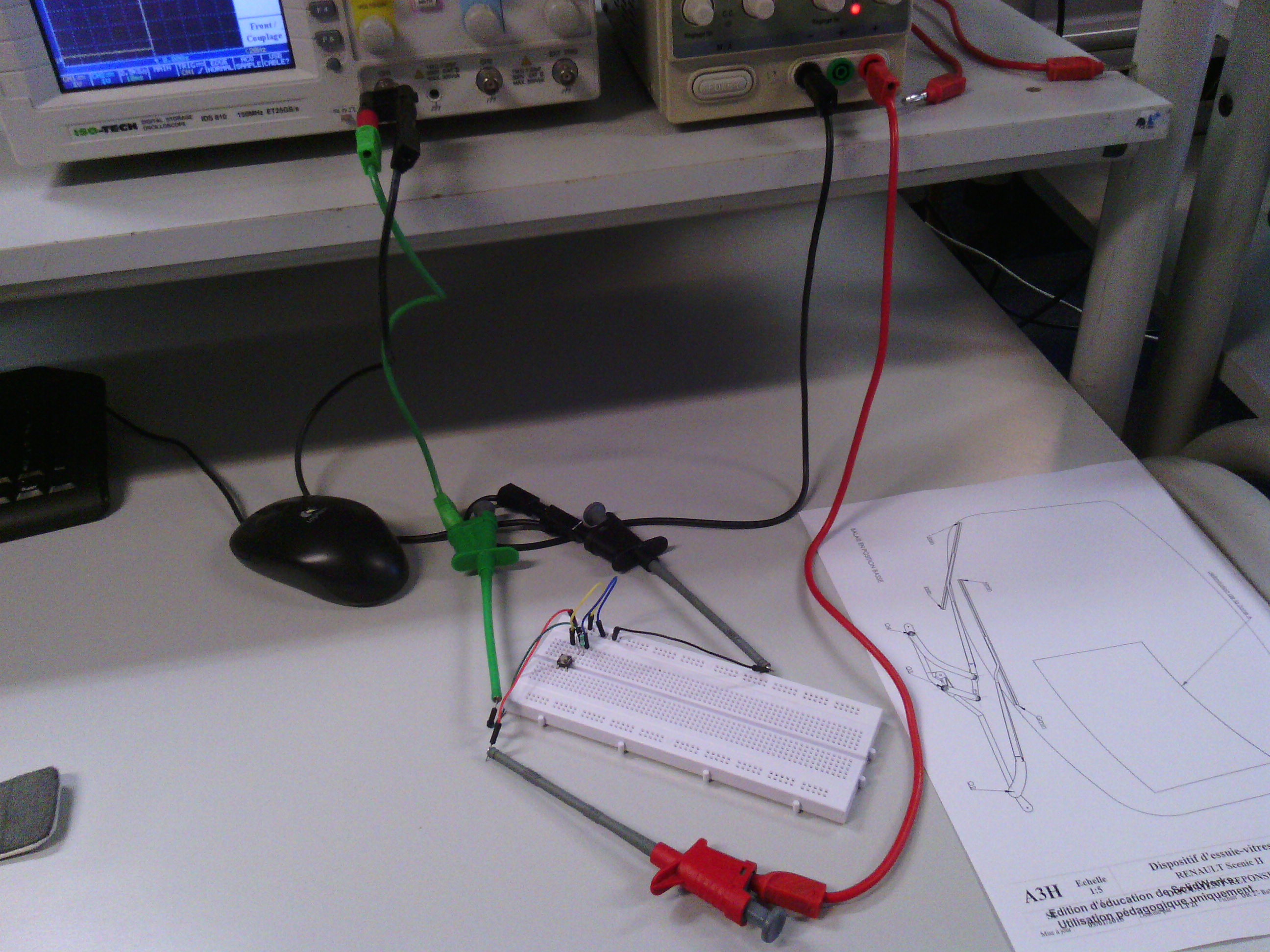
figure 16
| Position levier | Modélisation du bouton | U (V) |
| Relâché | Contact ferméCircuit fermé au repos | 0 |
| Enfoncé | Contact ouvertCircuit ouvert en position travail | 5.52 |
Chronogramme :
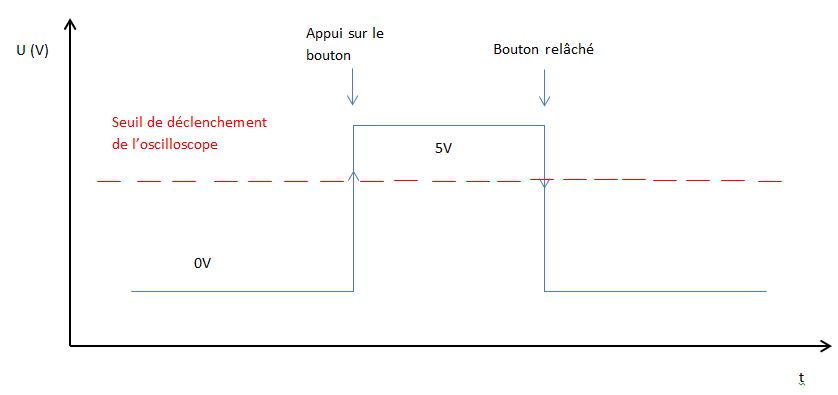
figure 17
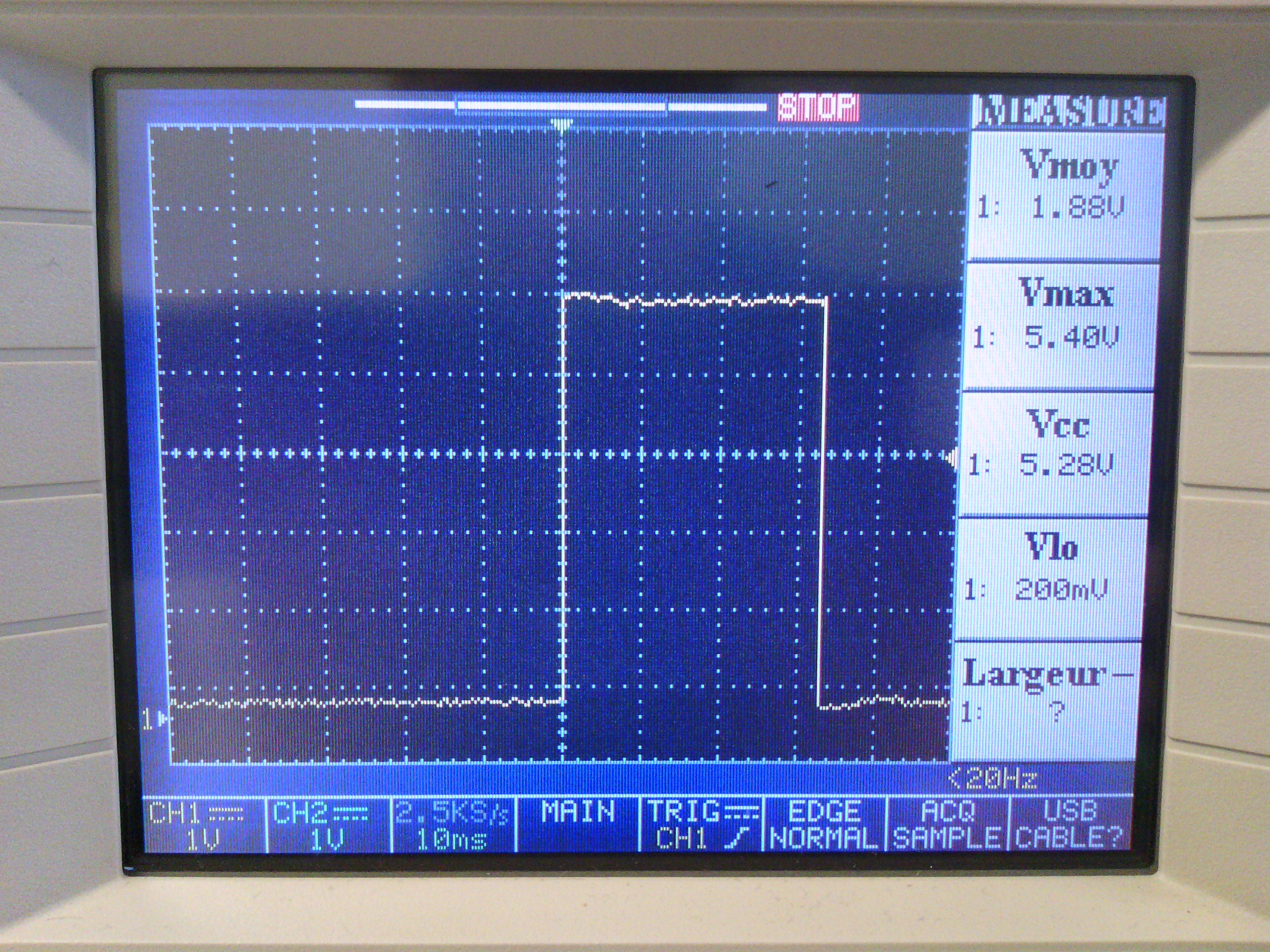
figure 18
A partir de ce chronogramme nous pouvons dire que la résistance monte le signal donc on peut affirmer que c’est une résistance dite (pull up). Et dire que le circuit et normalement ouvert comme nous le montre le résultat du tableau.
Schéma électrique :
- Structure réelle du circuit :
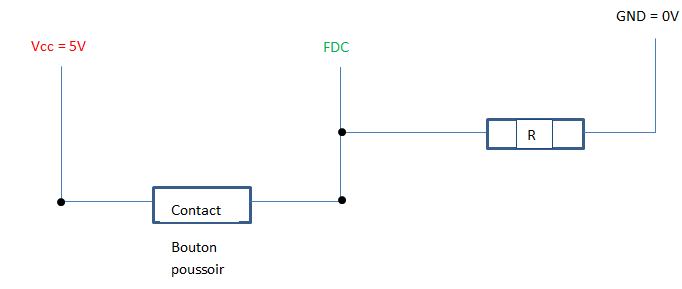
figure 19
- Schéma électrique à partir de la structure réelle du circuit :
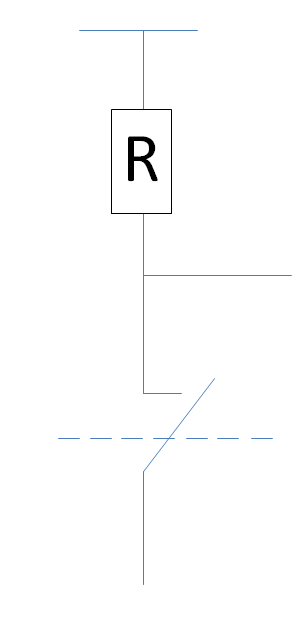
figure 20
6.5.5
Schéma de câblage :
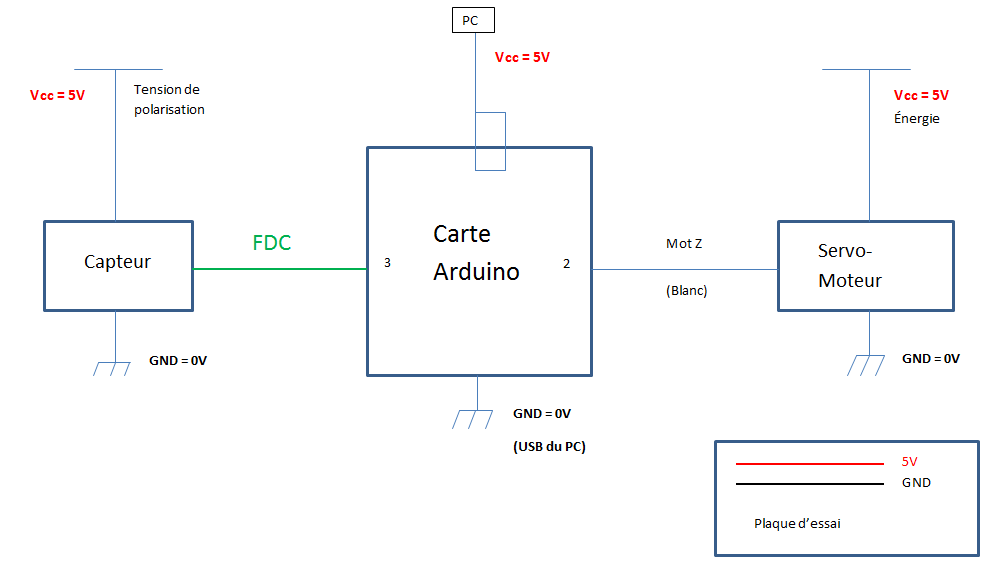
figure 21
Servomoteur :
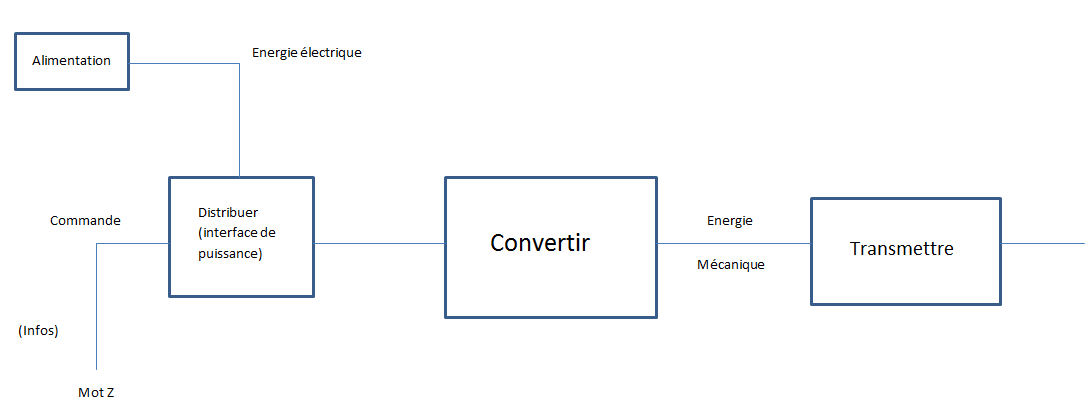
figure 22
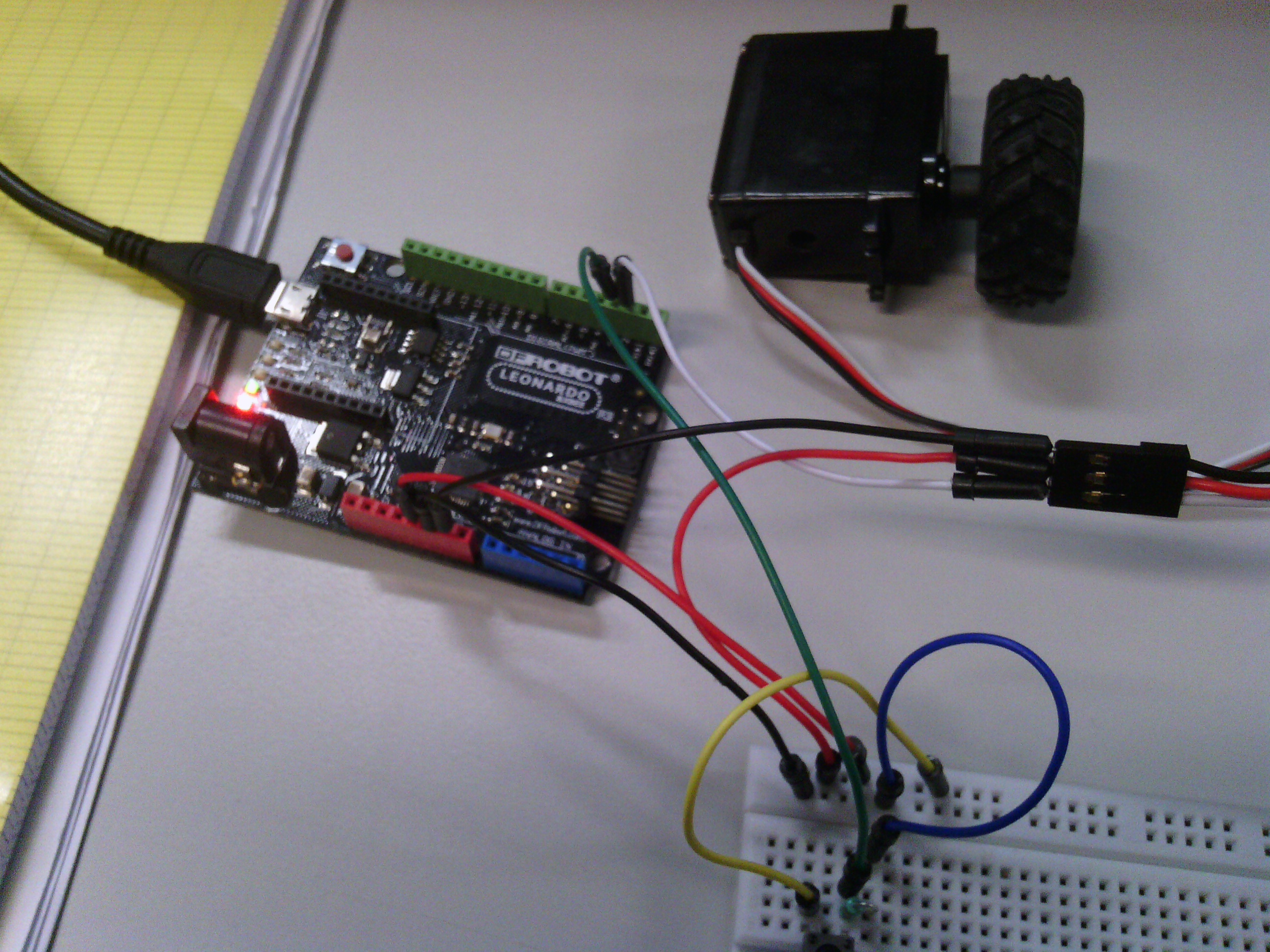
figure 23
Algorithme :
figure 24