
Comment acquérir une information sur la position d’un contact ?
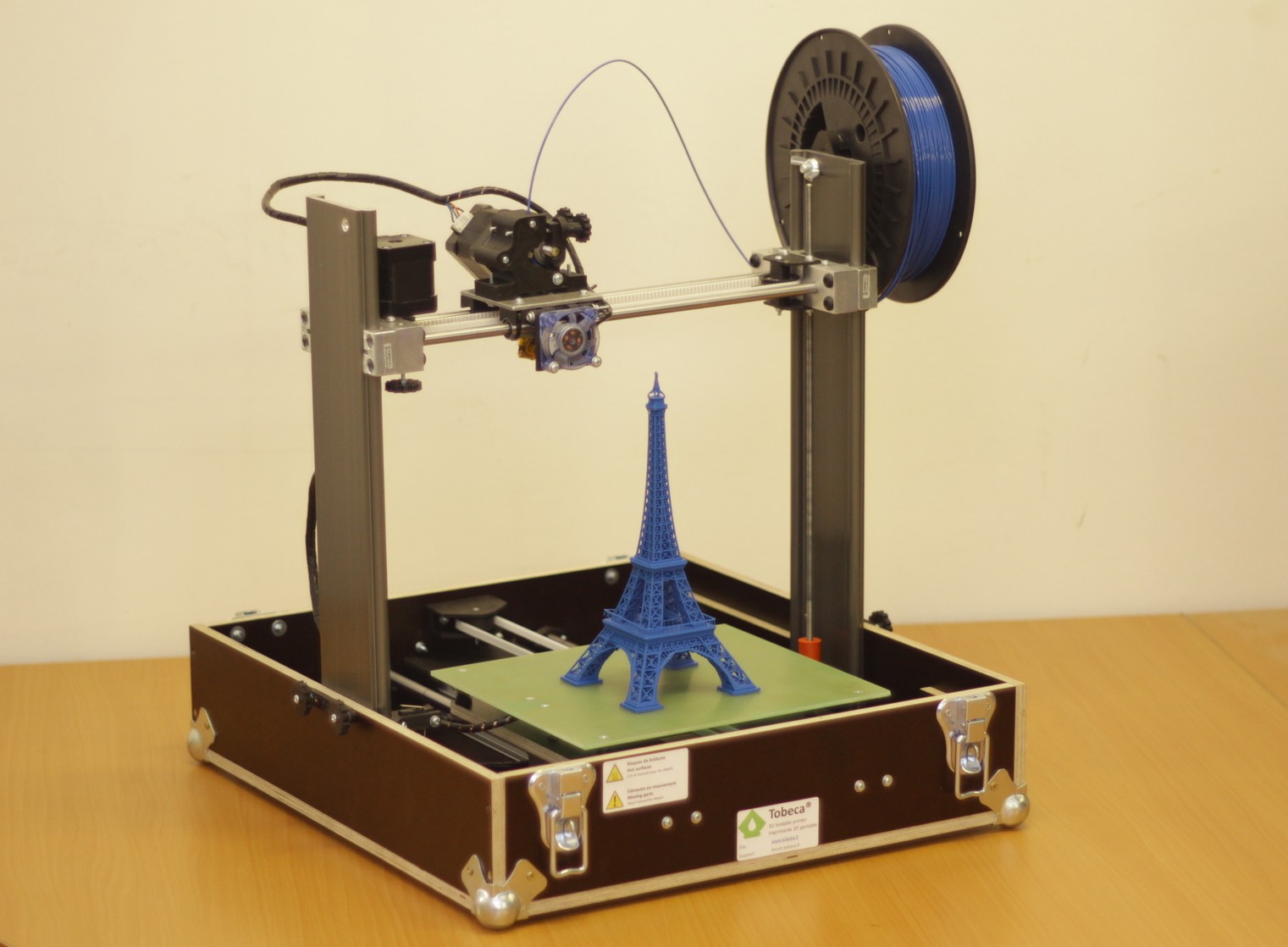
Dans le cadre d’un travail expérimentale sur l’imprimante 3D Tobeca 2 en sciences de l’ingénieur, nous avions pour objectif d’étudier un contact de fin de course sur l’imprimante.
Nous étions 2 par groupe et nous étions chargé de rédiger, par élève un compte-rendu sur un contact fin de course.
Pour des soucis de position et d’accessibilité, nous avons décidés d’étudier le capteur de position fin de course de l’axe Z.
Notre investigation s’est divisée en 3 parties principales :
- Investigation sur l’imprimante en classe entière
- Investigation par groupe de 2 sur un capteur FDC ( Fin De Course), relié à un multimètre
- Investigation sur un capteur FDC relié à un circuit électrique et a un oscilloscope (par 2)
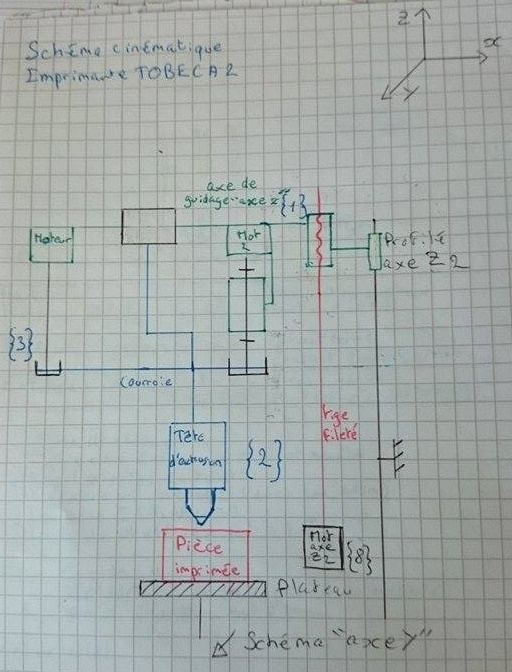
Schéma cinématique de l’imprimante 3D Tobeca 2
Lors de l’investigation en classe entière, nous avons étudié le comportement de l’imprimante en fonction de la position du contact FDC sur l’axe Z.
Nous avons par la suite étudié le capteur seul.
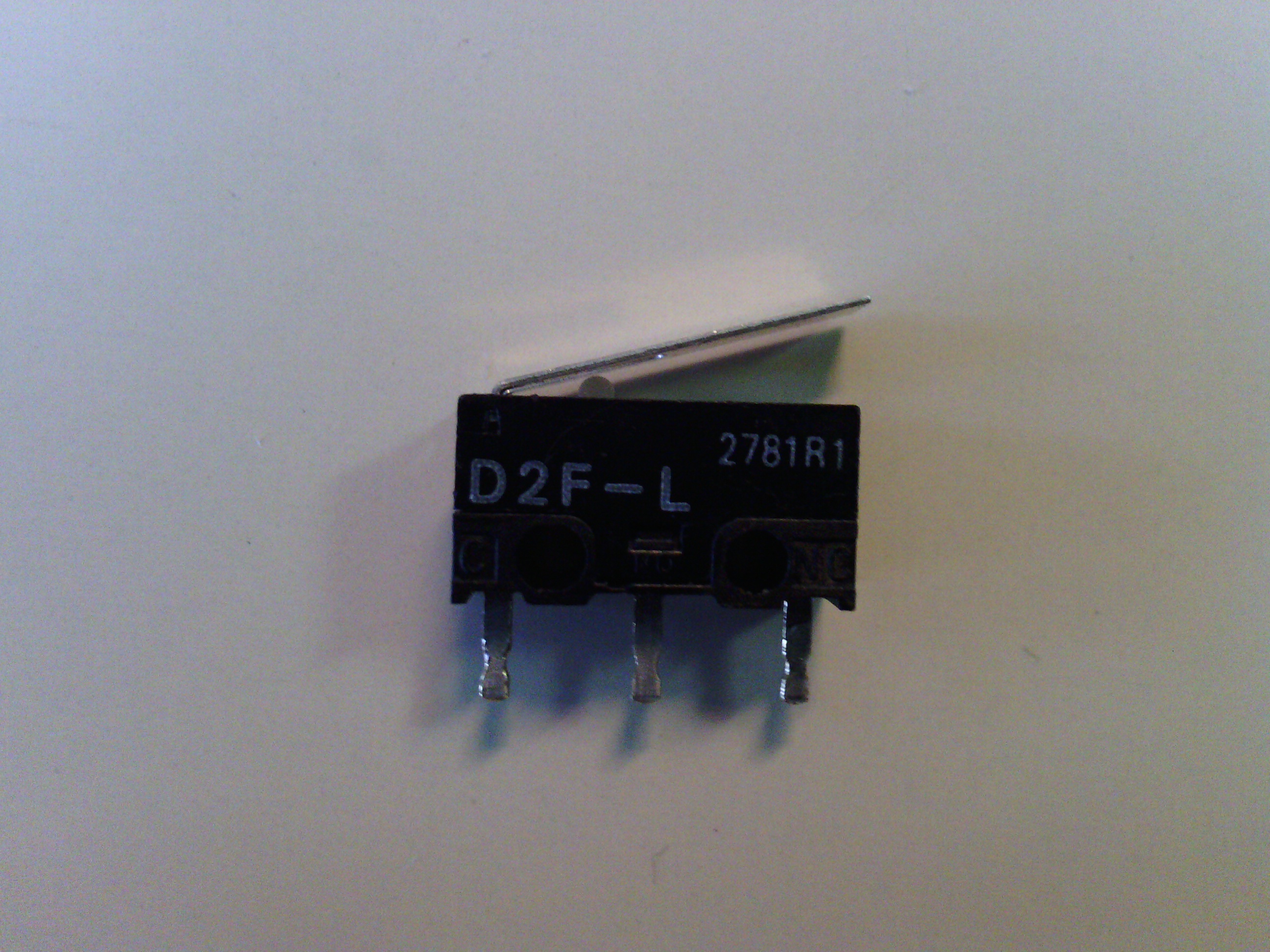
capteur
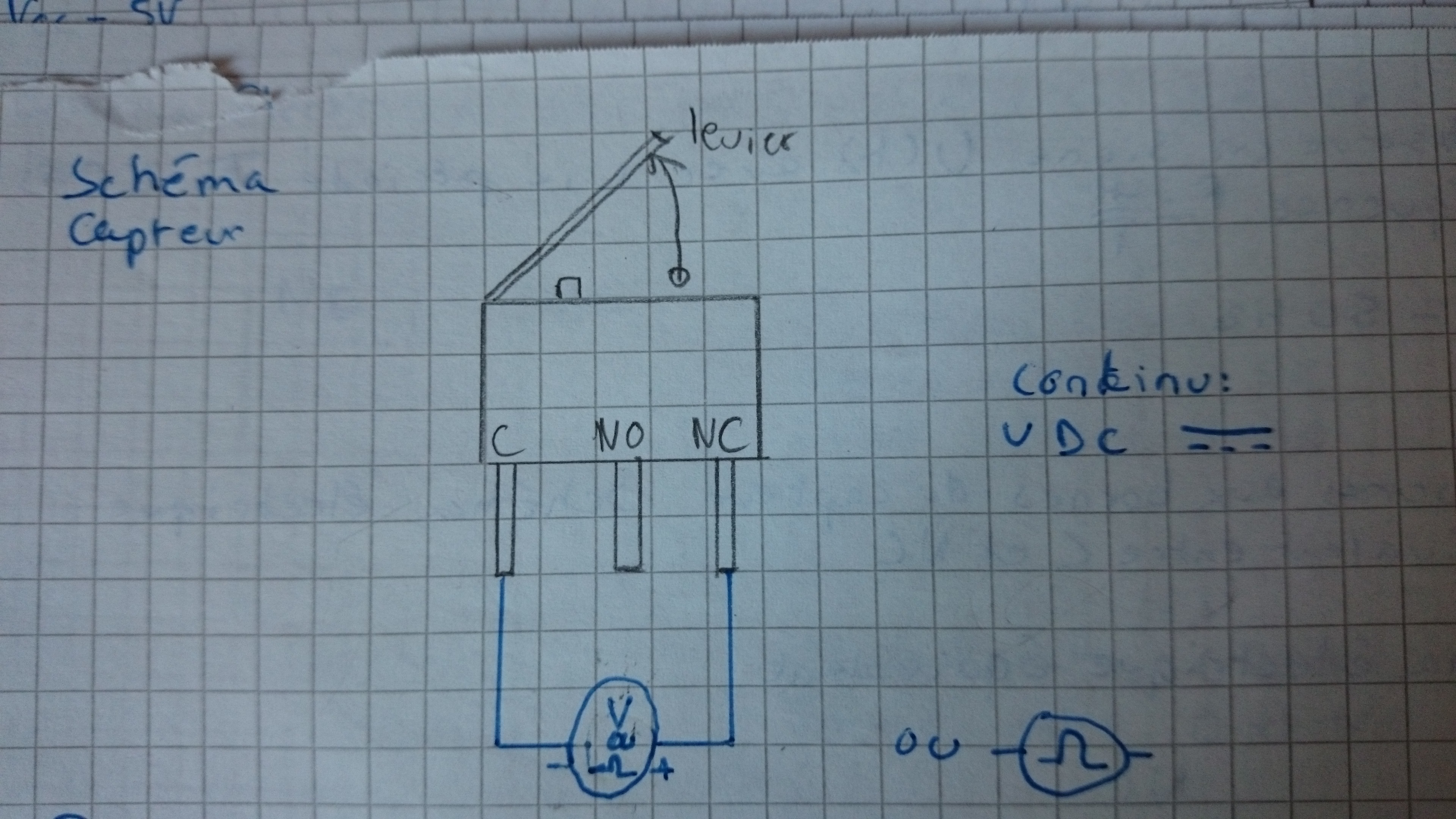
schéma capteur FDC
Lors de l’investigation par groupe de 2, avons étudier le contact avec un multimètre, que nous avons brancher aux bornes C et NC.
|
Position levier |
R (Ω) |
U (V) |
Modélisation du capteur entre les bornes C et NC |
|
Relâché |
≈ 0 |
0 |
Circuit fermé Contact fermé au repos |
|
Enfoncé |
O.L (OverLoad = dépassement de la capacité de mesure) R>99MΩ |
Pas stable (en l’air) |
Circuit ouvert Contact ouvert en position travail |
Enfin, nous avons relié le contact FDC avec un oscilloscope, toujours sur les bornes C et NC
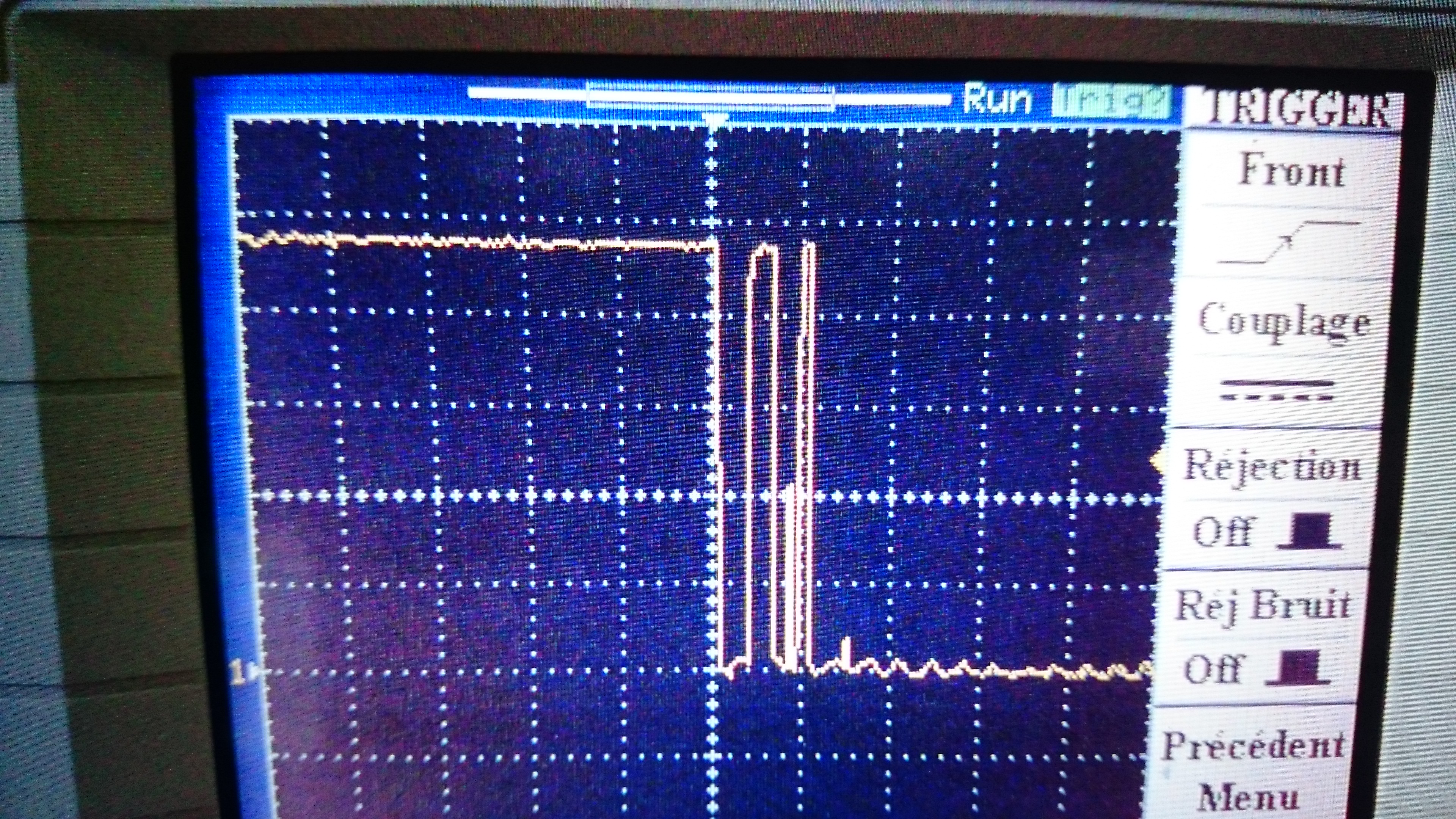
lecture oscilloscope passant de l’état du levier de appuyé (position au travail) à relâché (position repos)
Sur l’oscilloscope, nous pouvons observer un certain rebond lors du changement d’état du levier. Cela s’explique notamment par la souplesse du matériaux. La carte électronique ne prend bien évidement compte avec le trigger (seuil de déclenchement), permettant ainsi que le programmation ne s’active pas plusieurs fois de suites.
|
État levier |
U(V) |
R(Ω) |
État du contact, modélisation |
|
Relâché |
0 |
0 |
Contact fermé |
|
Enfoncé |
≈ 4,7 |
O.L. >99.9 MΩ |
Contact ouvert |
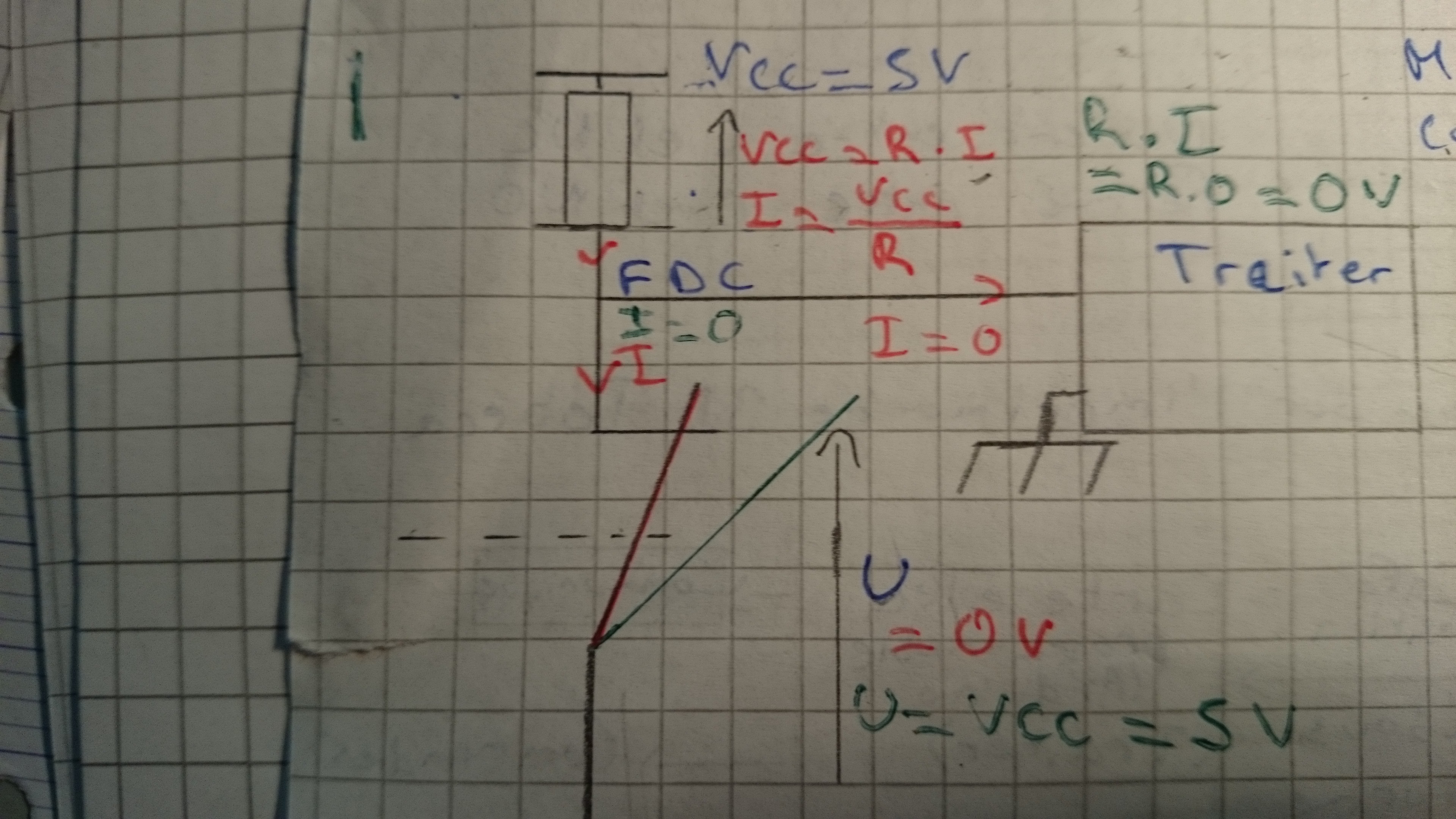
Modélisation du contact FDC
Nous pouvons constater que dans le circuit, nous avons mis une résistance, permettant ainsi de tirer le contact FDC au + permettant ainsi d’éviter un court-circuit.
Quentin D.