
Compte-rendu EC-5 TP automates
Comment mettre en œuvre un automate programmable industriel (API) ?
Un API à pour fonction de traiter des informations dans un système autonome dans un milieu industriel, celui-ci répond donc à des critères spéciaux du au milieu dans lequel il ce trouve, le traitement logique des informations ce fait avec une tension de 24V(contre 5V pour la plupart des microcontrôleurs) pour que le “bruit” électromagnétique des machines avoisinantes ne perturbe pas l’automate.
C’est lui qui actionne les actionneurs(moteurs,etc…) de la chaîne d’énergie du système, en fonction des informations des capteurs, interface de dialogue et bien sûr du programme qui lui est dédier.
Ce programme est créer avec le langage graphique GRAFCET, qui à pour but d’être maîtriser par les personnes travaillant dans l’industrie pour avoir un langage commun.
Le but de ce TP est de faire fonctionner un automate suivant un court programme :
État initial : objet en position A à l’arrêt
Répéter indéfiniment
Arrêter l’actionneur
Attendre que le bouton dcy soit activé
Activer l’actionneur dans le sens 1 pour déplacer l’objet vers B
Attendre que le capteur B détecte l’objet
Activer l’actionneur dans le sens 2 pour déplacer l’objet vers A
Attendre que le capteur A détecte l’objet
– On commence par faire un programme sur le logiciel Automgen, que l’on test sur le PC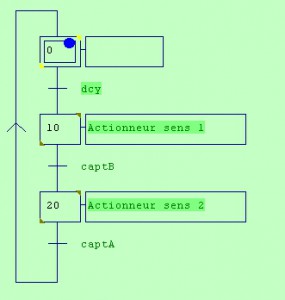
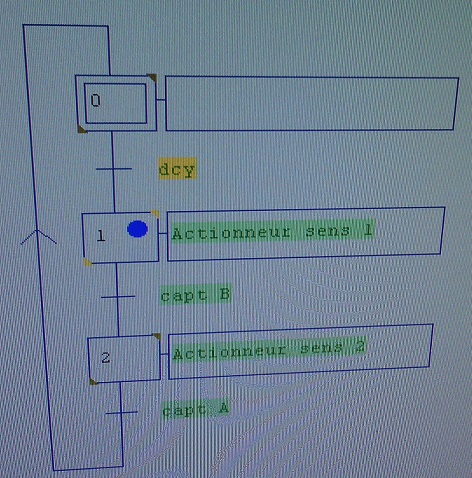
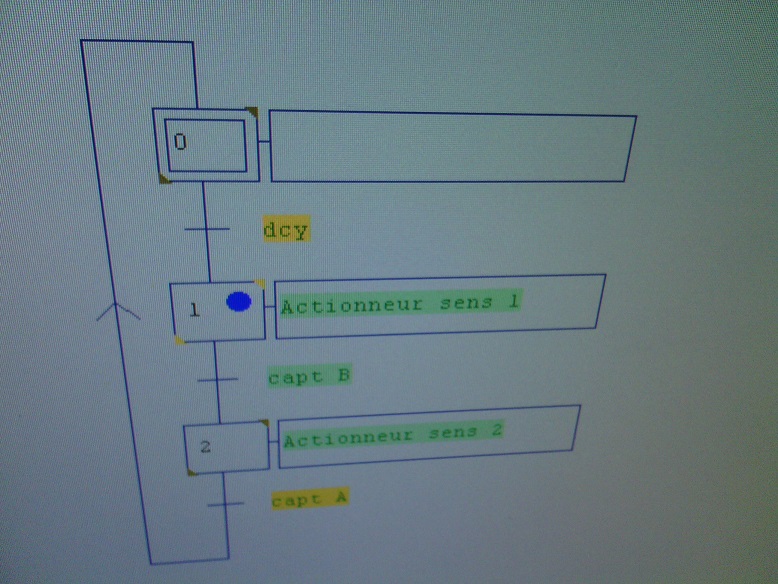
Même programme en langage GRAFCET
dcy est un bouton poussoir à activer sur le logiciel.
Les actionneurs sens 1 et 2 sont manuels.
Le point bleu représente l’état en temps réel du programme.
Les réceptivités surlignées en vert signifient quelles sont à l’état bas(elles ne permettent pas de continuer le programme tant quelles sont vert). Elles sont jaunes lorsqu’elles sont actives.
Il faut compiler le programme pour le PC avant de le lancer.
Une fois le programme lancer (Run) sur le PC pour tester, la boule bleu reste sur l’état initial jusqu’à ce qu’on appui sur dcy, ensuite elle traverse le programme à la vitesse maximale car il n’y aucun temps d’attente entre les étapes, vu que les capteurs et actionneurs sont fictifs lors du test.
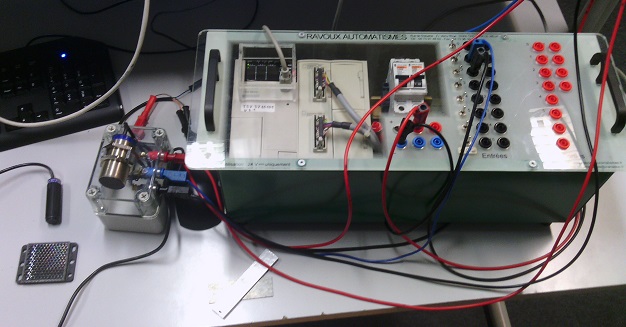
– Faire fonctionner ce programme sur un automate :
Avant d’utiliser des capteurs avec l’automate on utilise les interrupteur disponible sur l’automate.
L’automate est alimenté en 24Vcontinu par une alimentation branchée sur secteur, il est relié au PC par un câble spécial pour être programmée, les réceptivités sont nommées i0, i1 (retranscrit dans le programme lors de la compilation ou téléversation).
Lorsque le programme est en route il faut commuter les interrupteurs, (d’abord dcy) i0 pour la 2ieme transition puis i1 pour la 3ième transition, pour qu’il fonctionne entièrement mais la encore sans les actions vu qu’il n’y a pas encore de capteurs.
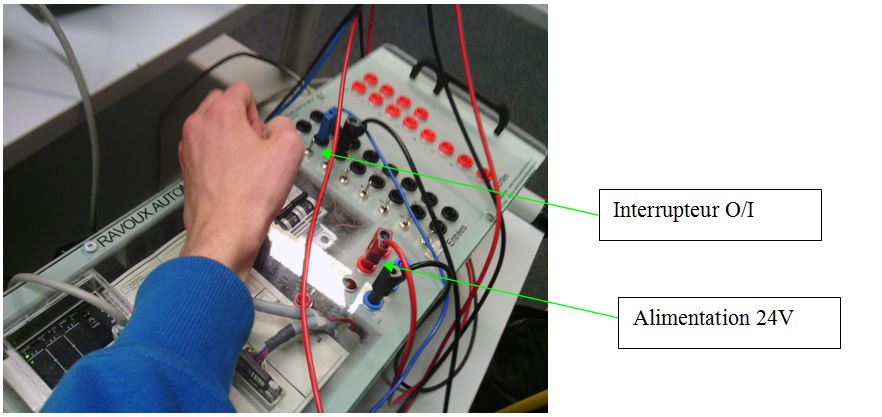
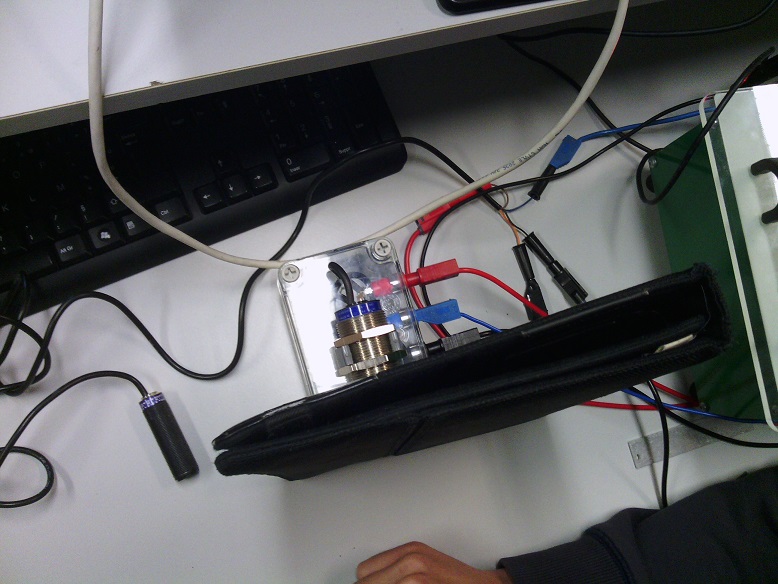
-Montage complet :
Les interrupteurs de l’automate ayants 3 positions (0/1/ext) on utilise l’externe pour connecter un capteur, pour le branchement de ceux-ci le, nous avons mis captA sur i1 et le captB sur i2(mais nous avons inverser l’ordre dans le programme).
Ces capteurs fonctionnent dans l’infrarouge, avec un émetteur et un récepteur, la sortie du capteur commute(à l’état haut ou l’état bas dépendant de si la capteur est inversé) si le récepteur reçoit la lumière .
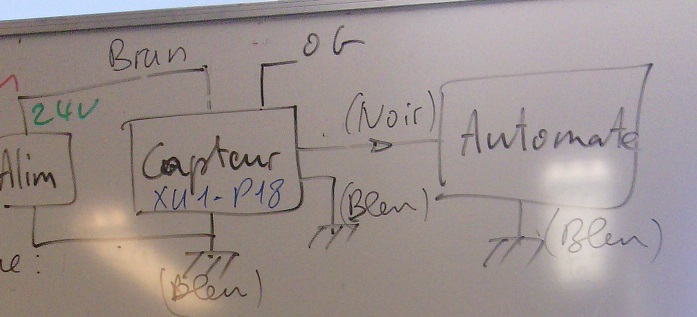
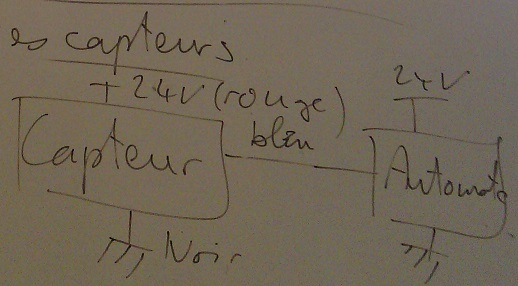
Montage du capteur XU1-P18PP340 pour un fonctionnement lorsque le capteur reçoit de l’infrarouge.
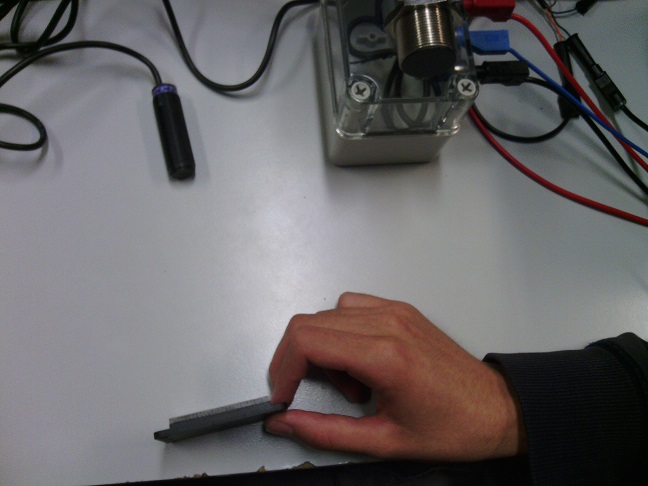 A droite (captA) est branché en dérivation sur l’alimentation (rouge noir) et le câble bleu est la sortie de l’information qui est branché sur i1, à gauche la (captB)capteur XU1-P18PP340 , les câbles brun et bleu sont pour l’alimentation et le noir pour l’information branché sur i2.
A droite (captA) est branché en dérivation sur l’alimentation (rouge noir) et le câble bleu est la sortie de l’information qui est branché sur i1, à gauche la (captB)capteur XU1-P18PP340 , les câbles brun et bleu sont pour l’alimentation et le noir pour l’information branché sur i2.
-Fonctionnement:
Nous avons utilisé comme objet la housse de ma tablette, mais il suffisait un objet d’une dizaine de cm et surtout qu’il ne réfléchisse pas l’infrarouge. L’actionneur pour bouger l’objet était nous même.
Au début du programme on active dcy sur le PC, ici le programme attends que le captB soit à l’état haut pour passer à l’étape 2.
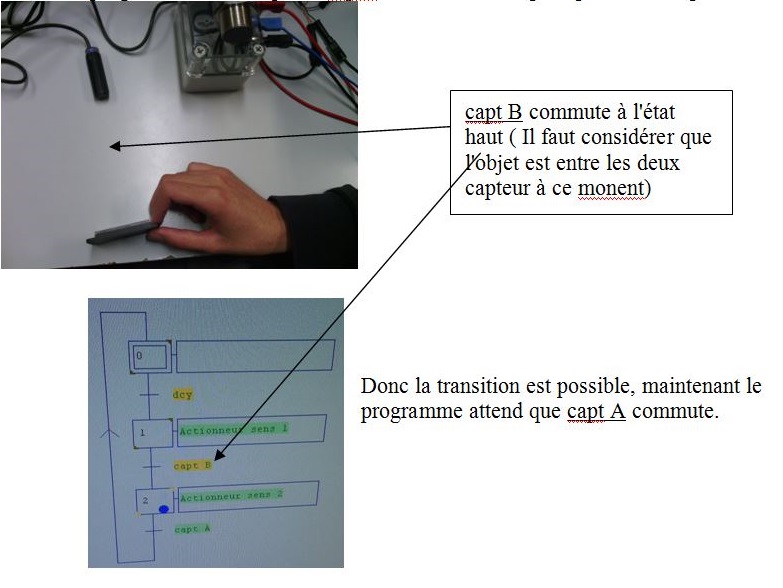
Ici capt A commute car l’objet est sur lui.
Sur le programme la boule bleu est repassée à l’étape 1 car la transition capt A a été validée et que dcy était déjà à l’état haut. Donc maintenant il attends de nouveau que capt B commute.
Le programme fonctionne le TP s’arrête ici, le suivant en classe est de faire un programme GRAFCET pour automate avec un bras à moteurs pneumatiques.