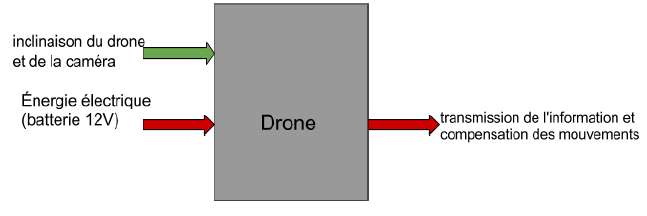
Voici le compte rendu de l’étude de la tension, la fréquence de signal et l’intensité d’un servomoteur SG90. Dans ces expérimentations nous avons utilisé une carte MicroBit qui est une carte électronique programmable, avec son logiciel accessible gratuitement sur internet. Voici donc la version du code que nous avons utilisé : servomoteur V3
1)Mesure de la tension d’alimentation :
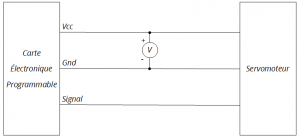
schéma mesure tension
2)Mesure du courant d’alimentation :

schéma mesure courant
3) Analyse des écarts avec les spécifications du servomoteur SG90
L’angle
4)Alimentation externe du servomoteur de 5V
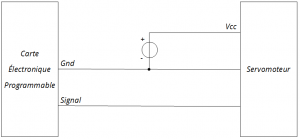
schéma alimentation externe
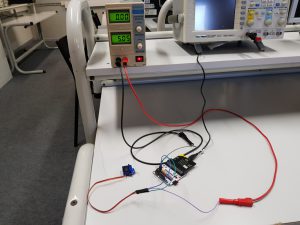
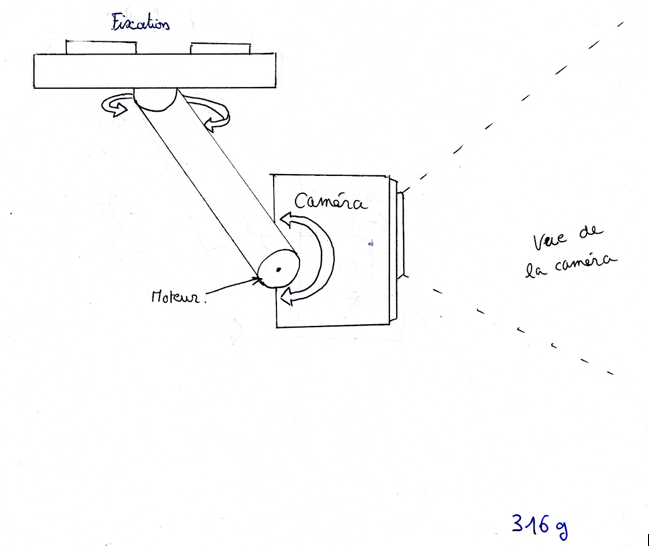
Photo expérimentation
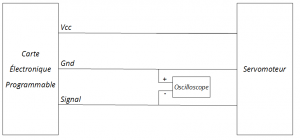
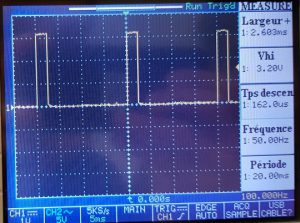
5) Analyse du signal de commande avec un oscilloscope
1)Schéma branchement oscilloscope :
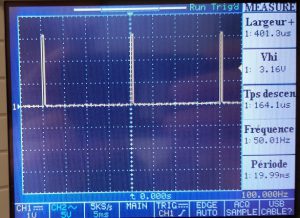
2)état initial servomoteur à 0° :
3) état intermédiaire servomoteur à 90° :
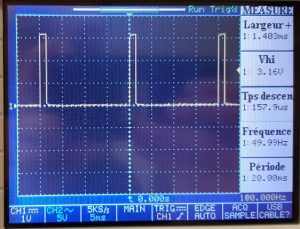
4) état final servomoteur à 180° :
Toutes ces expérimentations ont été faite par Noé et Louis dans le cadre d’un cours de sciences de l’ingénieur.