
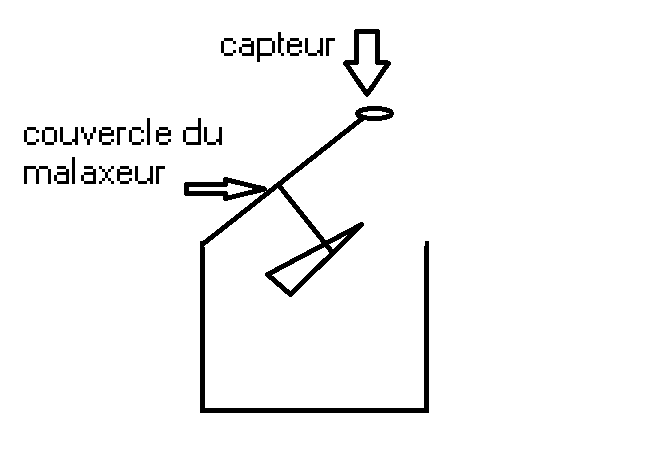
Un capteur est un composant qui prélève une information sur la partie opérative et la convertit en une information exploitable par la partie commande.
Il existe différents types de capteurs : logique, analogique et numérique. J’ai étudié pour ce TP un capteur logique.
LES CAPTEURS PHOTOÉLECTRIQUES :
Ce capteur est également appelé capteur TOR (Tout Ou Rien). En effet, sa sortie peut prendre que deux valeurs de tensions possibles. On peut ainsi associer à chacune des valeurs possibles un niveau logique. Soit 0, soit 1.
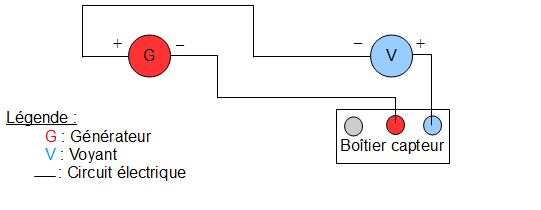
Sur notre capteur, une LED permet de visualiser l’état du capteur (présence ou pas de l’objet).
Le type de détection de notre capteur est une détection sans contact puisque le capteur détecte le phénomène à proximité de celui-ci.
Ce capteur fait partie des capteurs de proximité ou appelé également détecteurs de présence.
Trois technologies sont utilisées :
– les détecteurs photoélectrique de type barrage
Cliquez sur l’image pour lancer l’animation
– les détecteurs photoélectrique de type reflex
Cliquez sur l’image pour lancer l’animation
– les détecteurs photoélectrique de type proximité (l’objet devra être réfléchissant)
Cliquez sur l’image pour lancer l’animation
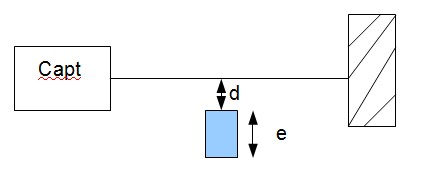
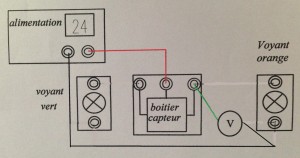
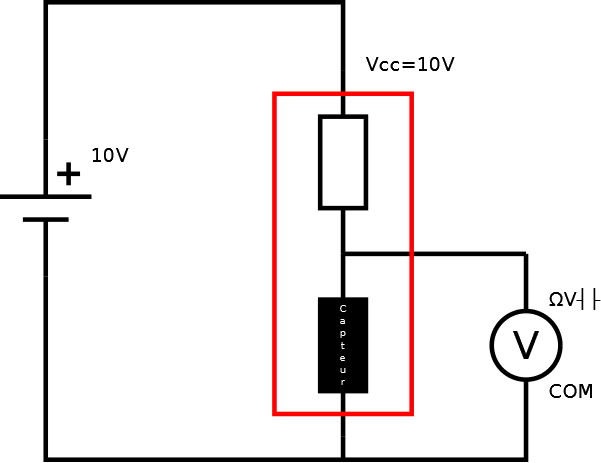
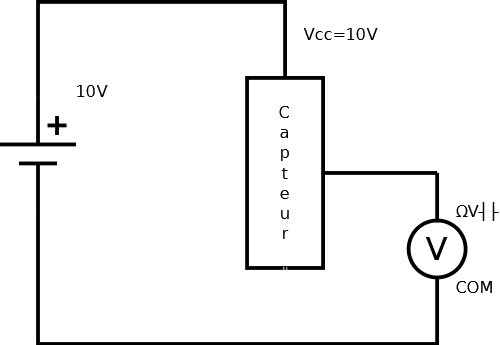
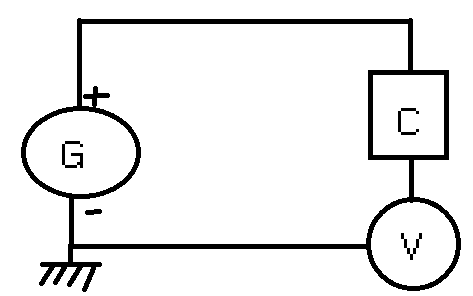
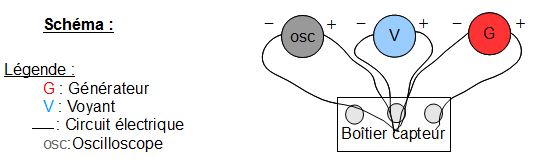
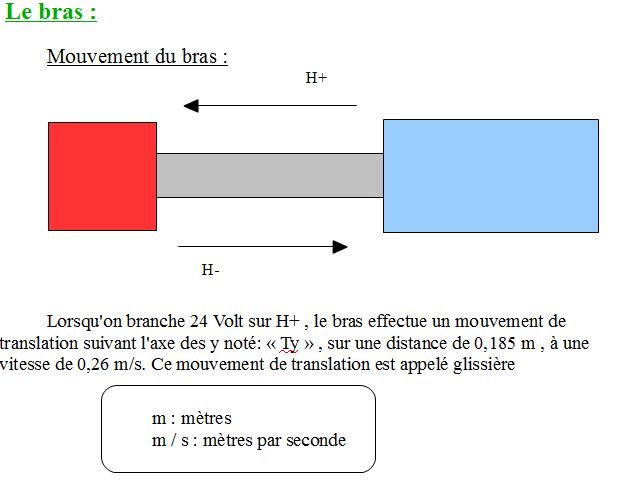
J’ai donc pour ma part utilisé et étudié un capteur reflex. Pour visualiser sa tension de sortie nous avons dû mettre sous tension (24V) le capteur et brancher sur la borne de sortie un oscilloscope. J’ai résumé mon branchement par un schéma assez simple (voir schéma en dessous).
Un oscilloscope
http://www.electrome.fr/produits/produits/mesure/oscillo/images/HM5072.gif

Source LP2I
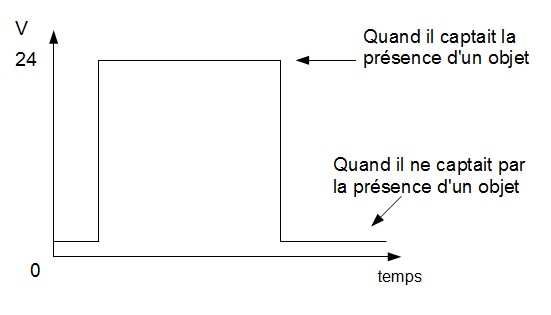
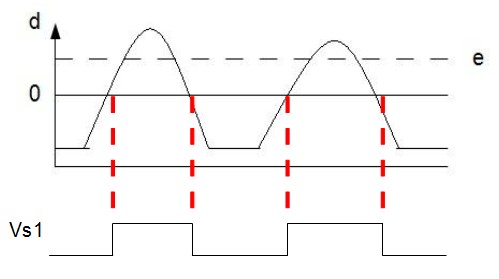
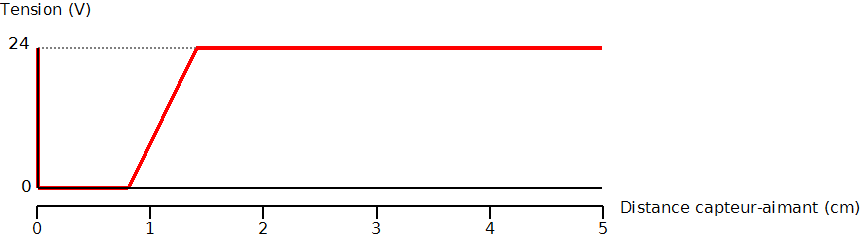
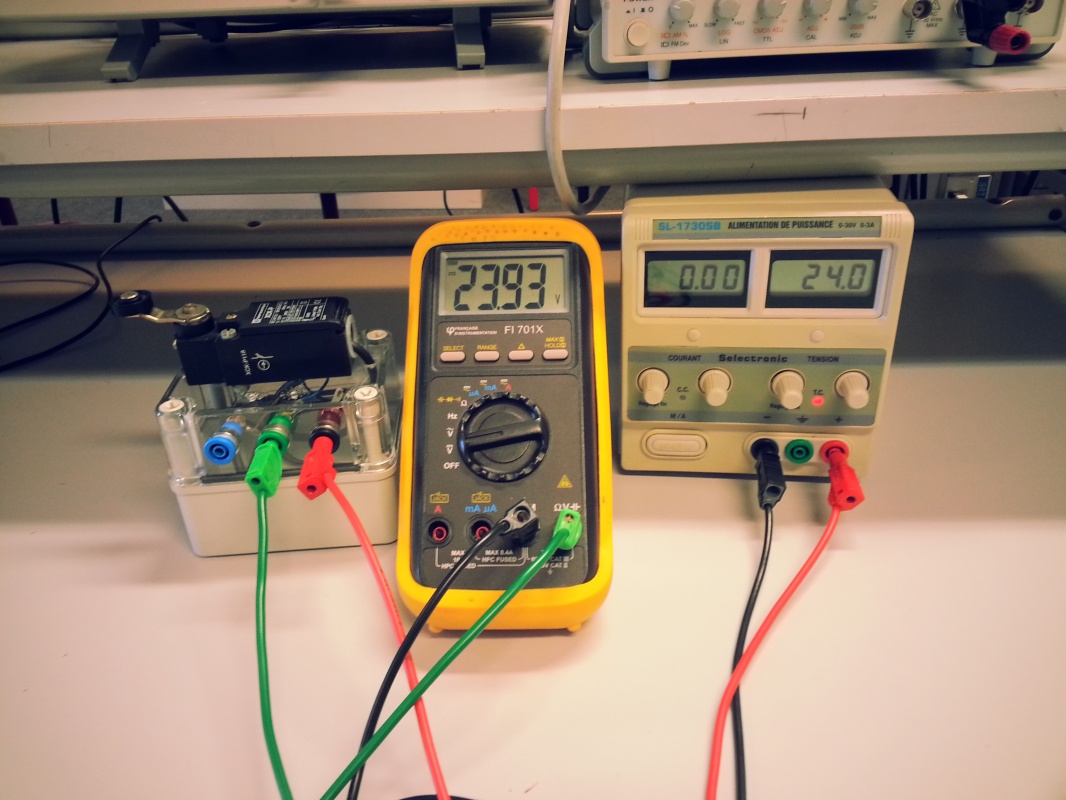
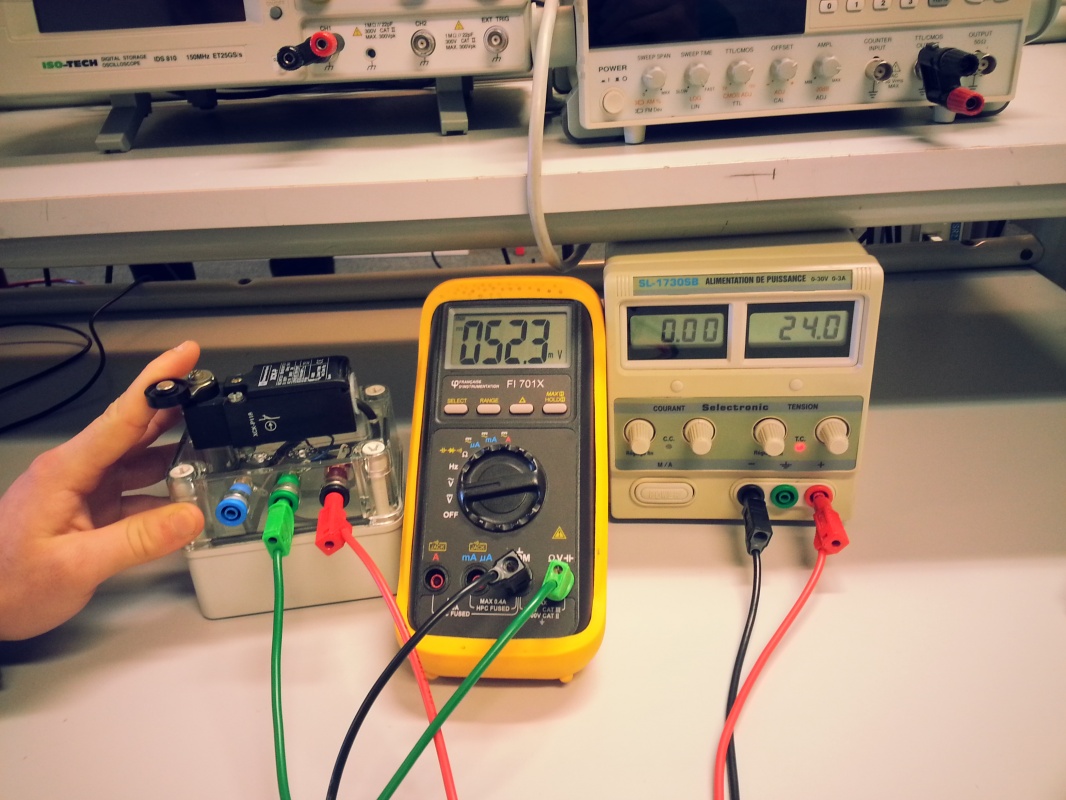
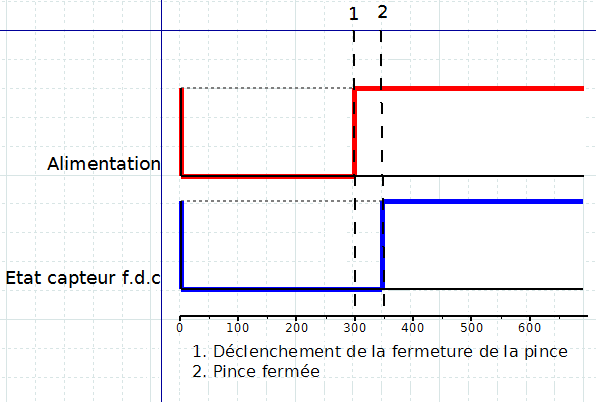
En passant ou pas un objet devant le capteur, j’ai observé que le signal de sortie varié et que l’on pouvait associer la tension de sortie à la présence ou pas de l’objet.
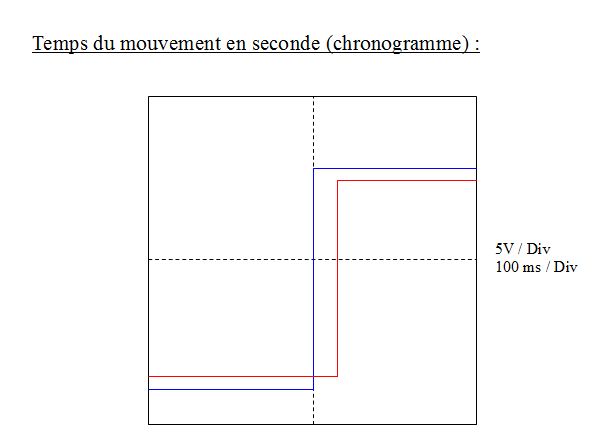
Sur l’oscilloscope, cela nous donnait quelques chose semblable à ceci…
Source LP2I
Source LP2I
Source LP2I
Nous pouvons associer la valeur 0v au niveau logique 0.
Nous pouvons associer la valeur 24V au niveau logique 1.
Des applications de ce capteur:
Ce capteur peut être utilisé sur des portails électriques : détection de la présence ou pas du véhicule, pour savoir si le portail peut se refermer.
Il peut être aussi utilisé pour la détection des objets dans des chaînes de production. Également aussi comme capteur de sécurité (capteur qui va arrêter le fonctionnement d’une machine s’il détecte une présence humaine).








 Différentes observations :
Différentes observations :