Comment l’imprimante 3D Tobecca arrive-t-elle à déterminer sa position Z=0 ?
1.Observation de l’imprimante lors de la prise d’information Z=0
Pour répondre à cette problématique, nous avons réalisé une étude expérimentale. Nous avons observé ce qu’il se passait lorsque l’on demandais à l’imprimante de redescendre à sa position Z=0.
Nous avons observé que lorsque la tête d’impression de l’imprimante descend à sa position Z=0, elle descend rapidement dans un premier temps, appuie sur un interrupteur, remonte légèrement, et finalement redescend de manière plus lente.
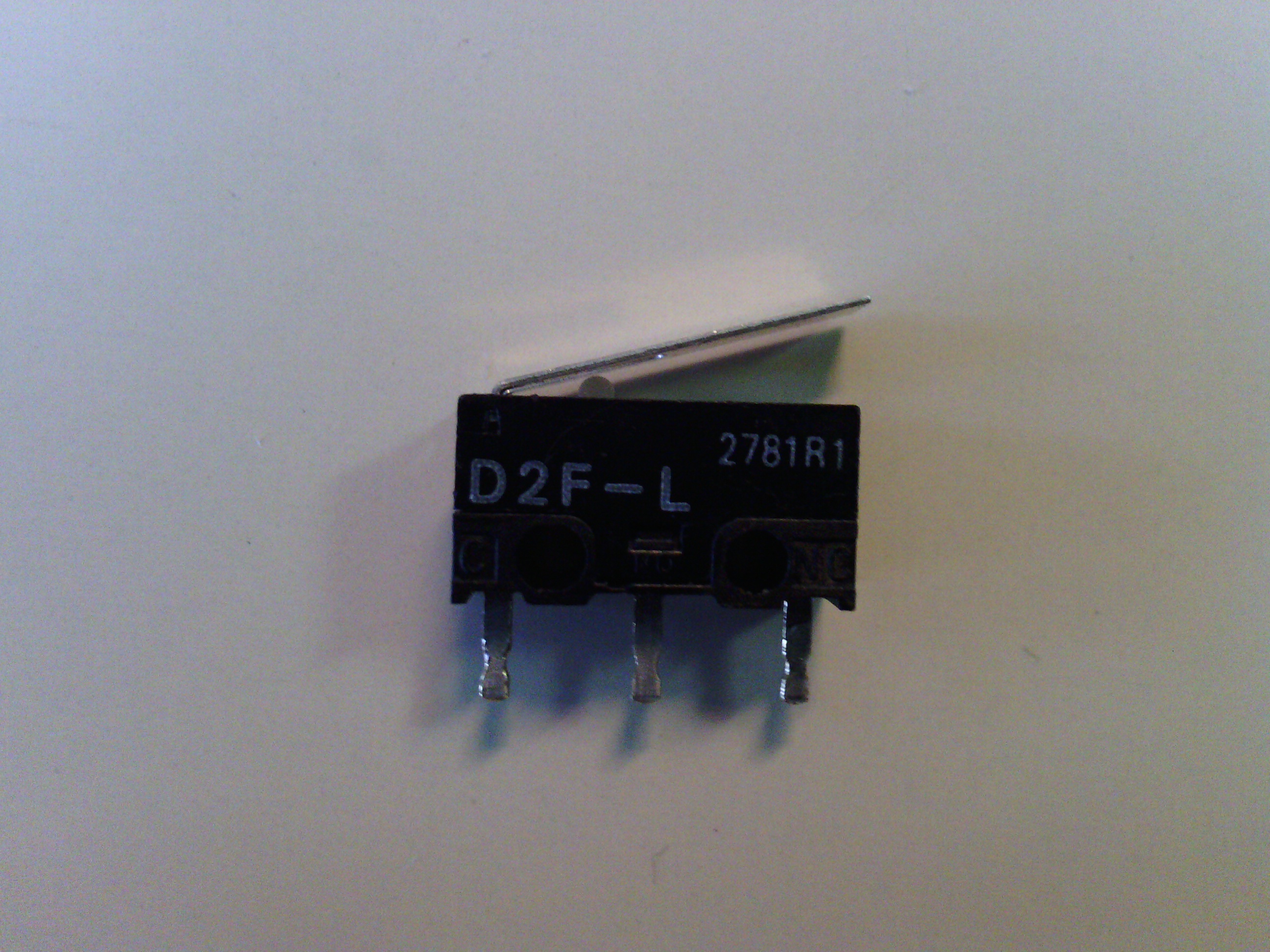
Nous avons observé cet interrupteur.
Tout d’abord, l’interrupteur est constitué de 3 bornes:
NC = Normaly Closed = Fermé au repos

contact normalement fermé
NO = Normaly Open = Ouvert au repos

contact normalement ouvert
C = Common = borne commune
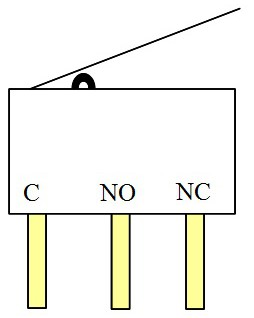
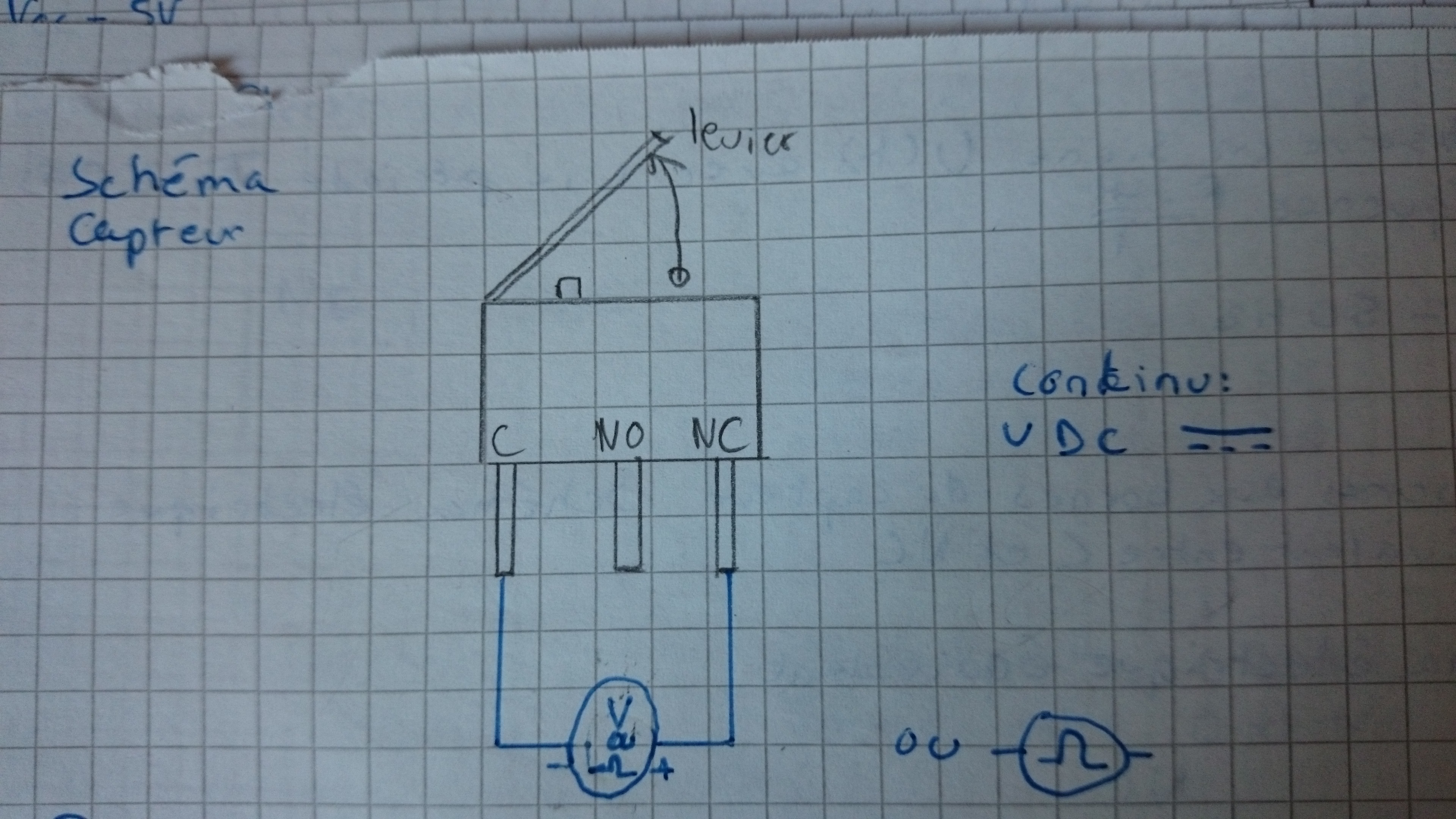
schéma interrupteur
2. Étude de l’interrupteur
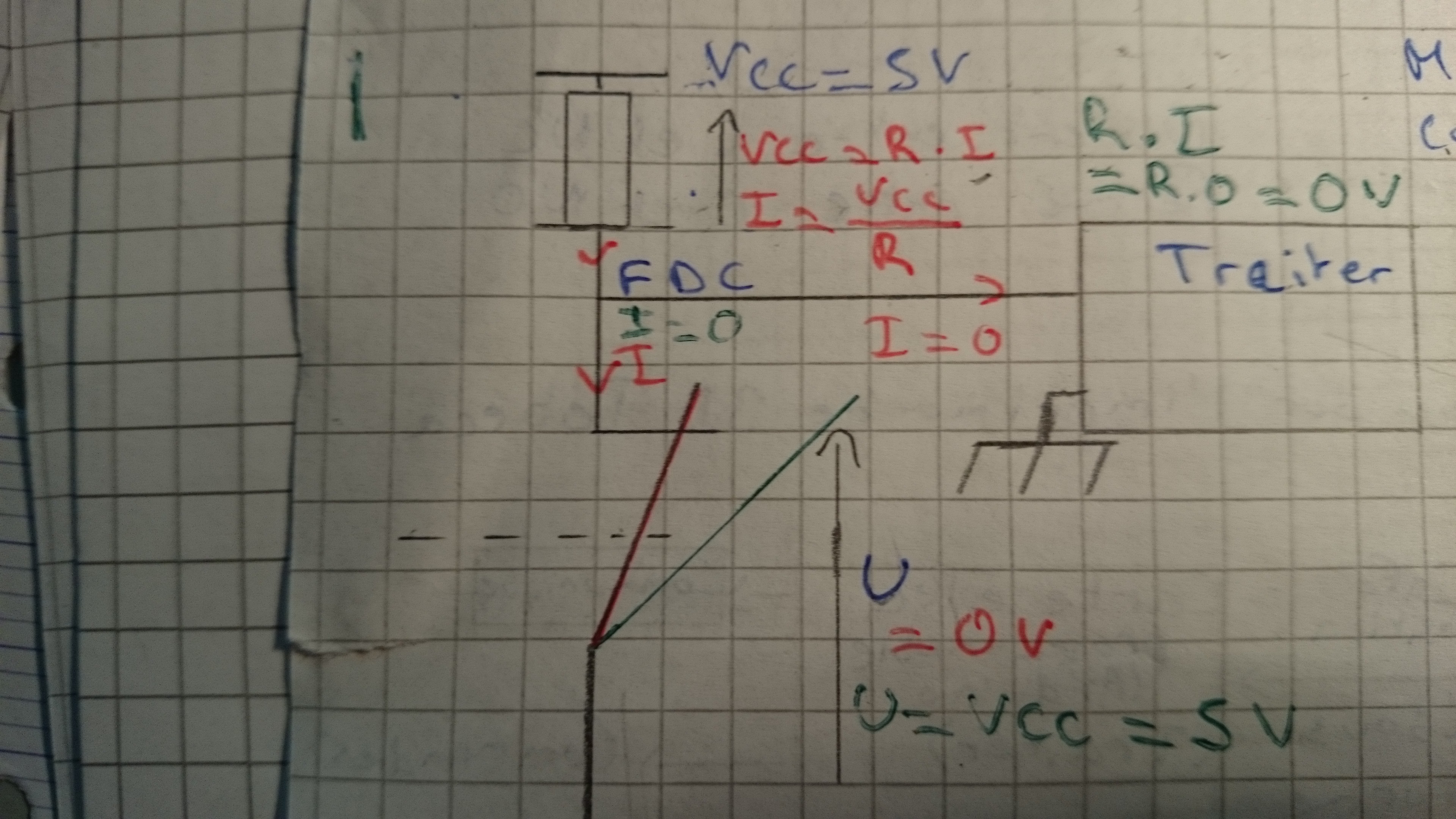
Grâce à un multimètre, nous avons relevé la tension et la résistance aux bornes NC-C et NO-C.
Dans un premier temps, nous avons relié les bornes NC et C à un multimètre.
Et voici les mesures relevées en fonction de la position de l’interrupteur :
|
U (V) |
R (Ω) |
|
|
Enfoncé |
Instable (en l’air) |
>99 MΩ |
|
Relâché |
0 |
Environ 0 |
Même procédure avec les bornes C et NO :
|
U (V) |
R (Ω) |
|
|
Enfoncé |
0 |
Environ 0 |
|
Relâché |
Instable (en l’air) |
>99 MΩ |
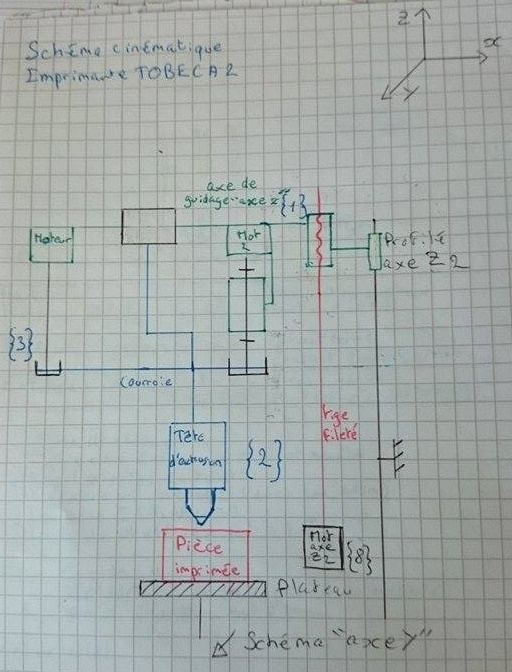
Ci-dessous, un schéma du circuit de l’imprimante 3D incluant le bouton étudié, avec ses bornes NC et C (NO n’est pas utilisé sur l’imprimante). La résistance R évite un cours circuit et permet de tirer la borne au plus lorsque l’interrupteur est au repos. Le bloc « Traite » correspond à la carte Arduino. U1 et U2 sont des tensions.
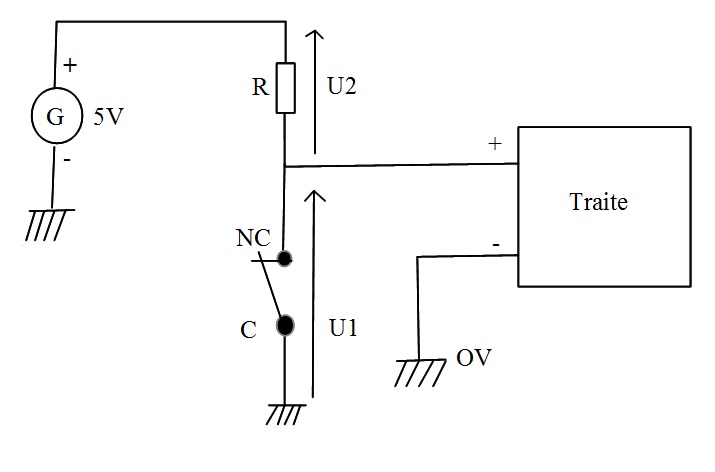
schéma de câblage de l’interrupteur
3.Mesures sur oscilloscope et conclusion
Nous avons finalement réalisé d’autres mesures, directement en se branchant sur l’imprimante, à l’aide d’un oscilloscope.
Lorsque l’on appuie sur l’interrupteur en le maintenant, nous observons que la tension passe instantanément de 0V à 5V.
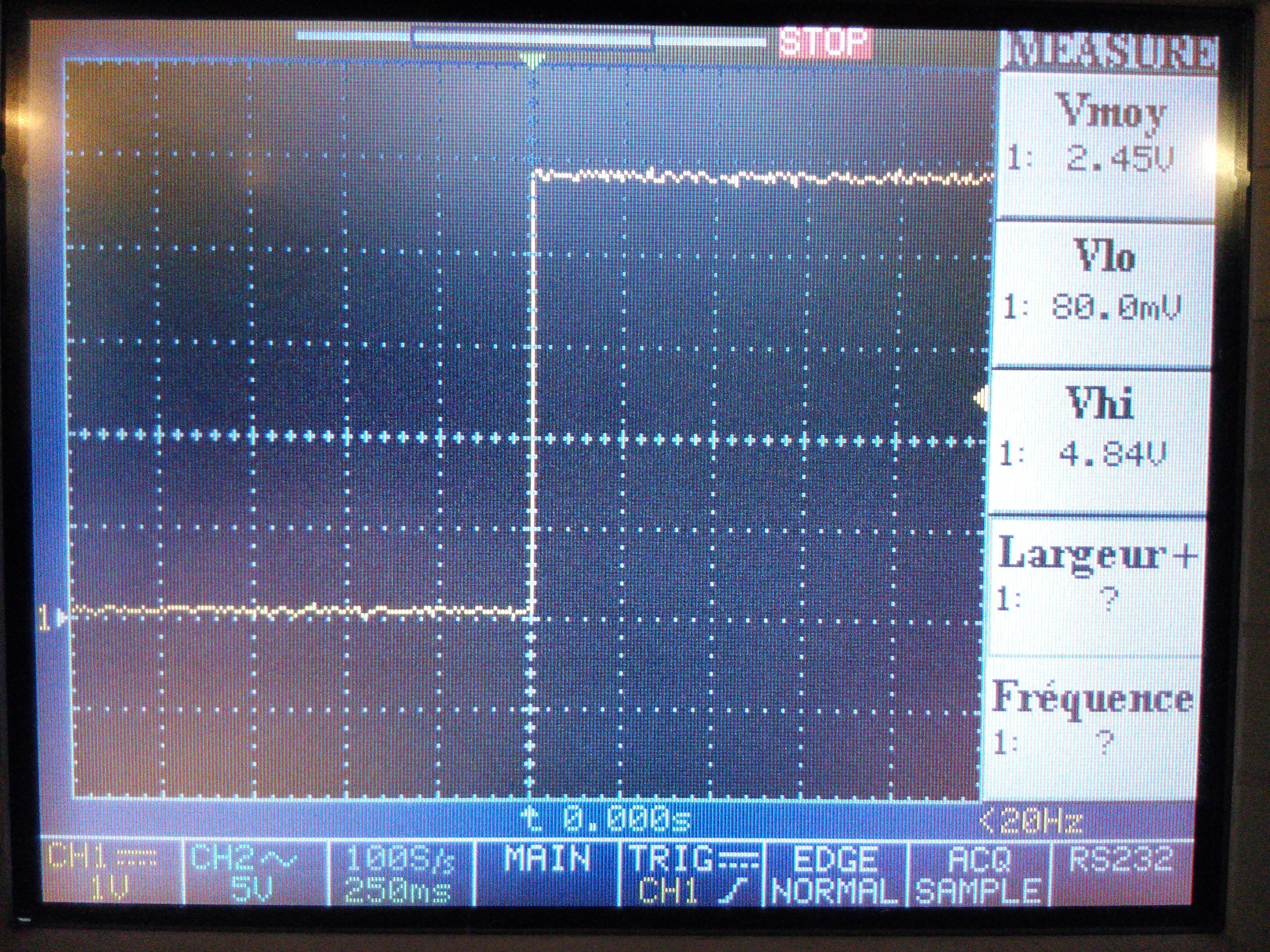
oscilloscope, transition ouvert-fermé
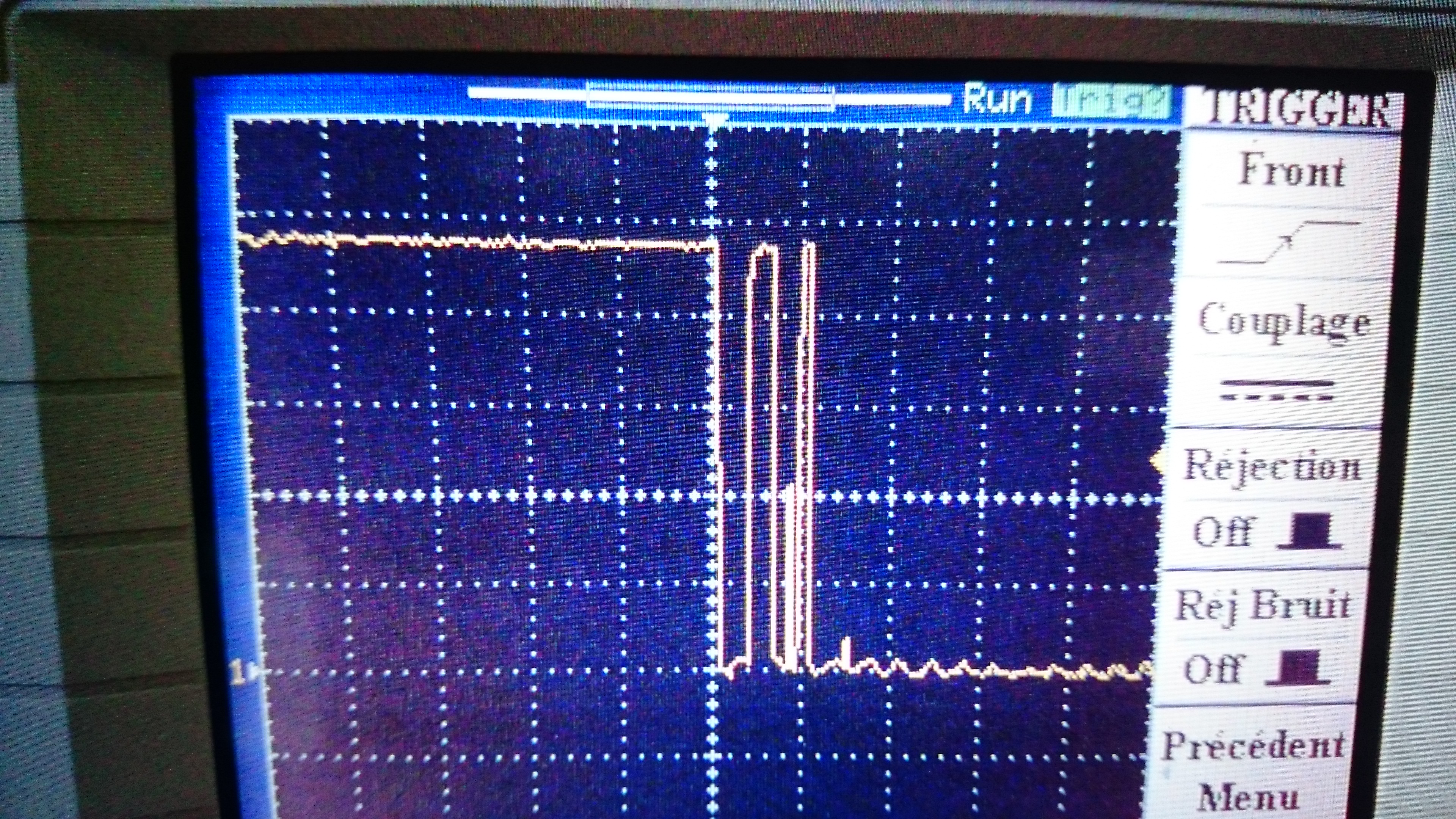
Et voici ce qu’affiche l’oscilloscope lorsque la tête d’impression atteint l’interrupteur et réalise la série d’action évoquée plus précédemment.
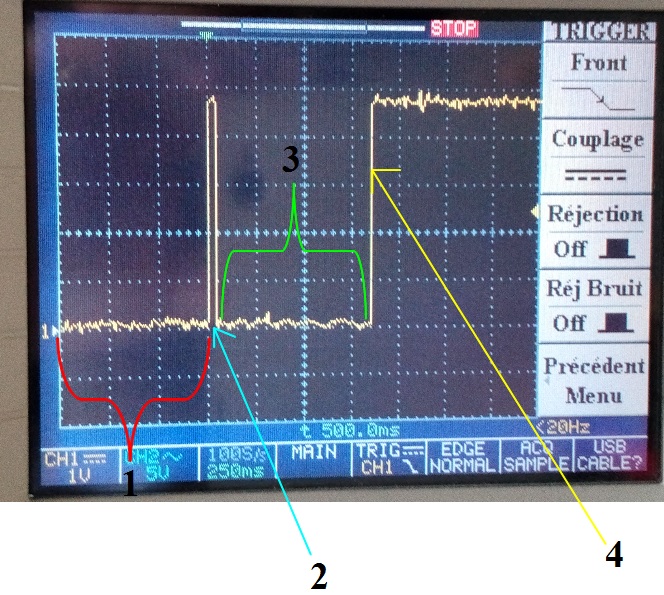
Lorsque l’imprimante atteint Z=0
1.L’imprimante est en descente rapide
2.L’imprimante appuie sur l’interrupteur (pendant environ 100ms)
3.L’imprimante remonte rapidement et redescend lentement.
4.L’imprimante appuie à nouveau sur l’interrupteur et s’arrête dans cette position.
Pour répondre à la problématique, nous pouvons donc dire que l’imprimante détermine sa position Z=0 en se servant d’un interrupteur normalement fermé sur lequel elle appuie (et donc ouvre) grâce à la tête d’impression. Elle réalise ensuite le cycle ci-dessus afin d’éviter de descendre trop bas à cause de l’inertie.