
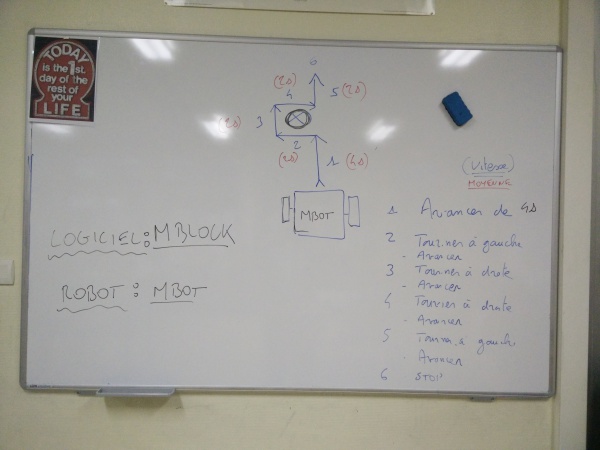
Puisqu’il faut bien commencer, premier problème à résoudre, éviter un obstacle, sans capteur, uniquement avec une série d’instructions, un programme !
Allez, on pose le problème au tableau et on liste les étapes, ça c’est un algorithme ! Comme une recette de cuisine… A la fin on doit obtenir un résultat, de plus les instructions sont en langage compréhensible par l’homme, ce sont les élèves qui transforment cet algorithme en programme…
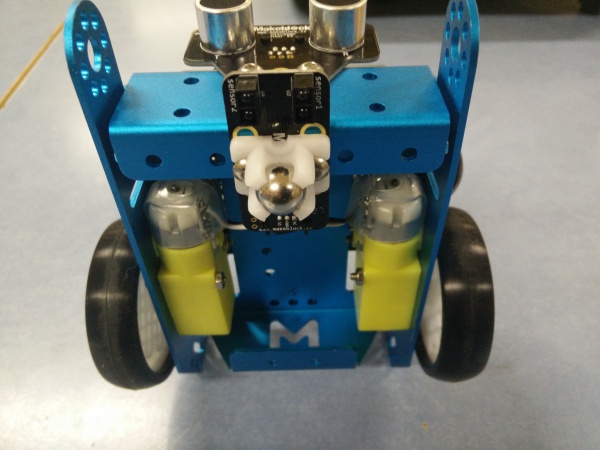
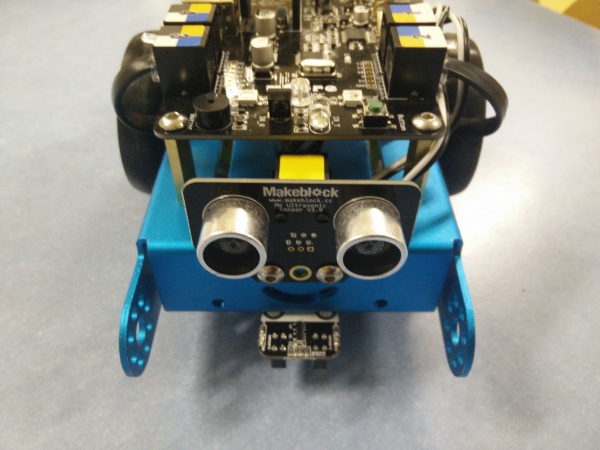
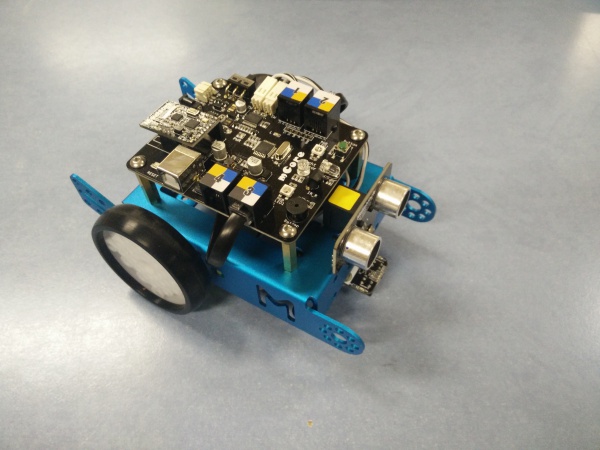
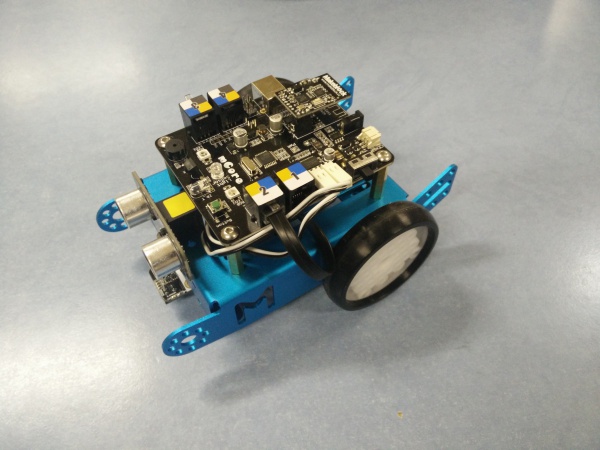
Cette fois on change de robot, c’est un Mbot
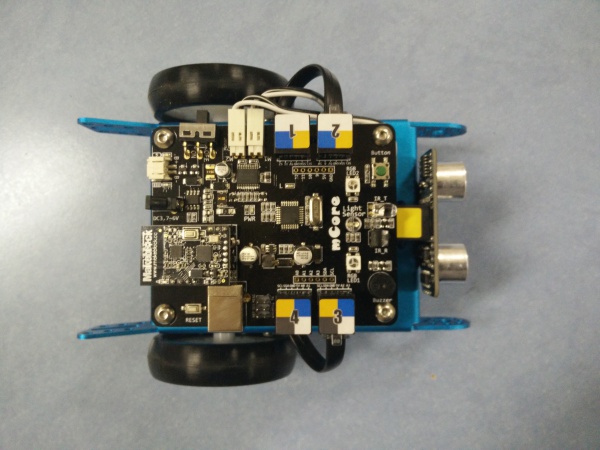
Le micro contrôleur est basé sur un Arduino Uno. Il est équipé d’un émetteur/récepteur à ultra sons et d’un suiveur de ligne, deux moteurs, et support pour module wifi ou bluetooth. Récepteur infra rouge pour télécommande, émetteur infra rouge, Del RVB, et avertisseur sonore. Parfait pour bien débuter.
Pour ce robot nous utilisons un autre logiciel : Mblock, c’est une variation de Scratch dédiée à ce robot.
Il n’est pas question d’écrire des lignes de code mais d’utiliser des blocs ayant des fonctions différentes et de les associer pour former un programme.
La prise en main du logiciel est assez simple, mais comme toujours il faut se familiariser et en comprendre la philosophie. Il a suffit aux élèves d’une seule séance, je leur indique comment faire avancer le robot, ensuite ils programment l’évitement de l’obstacle… Un robot pour deux (ou bien pour un seul élève) et voilà 16 robots en balade dans la classe, certains tournent en rond, d’autres vont tout droit, etc.
Mais, tous essayent d’obtenir le résultat escompté.
Les premiers tours de roues des robots sont concluants, les robots sont en balades dans la salle, ce qui m’a obligé à changer la disposition de la classe, en laissant un bel espace dédié au essais, la salle est plus agréable, on respire…
Second travail : faire faire un ovale au robot, facile à dire, mais est-ce si facile à programmer ? Allez, quelques minutes de recherche et ça y est, les élèves s’approprient assez vite le logiciel, petit-à-petit ils en perçoive la philosophie. Prochaine étape : utiliser les capteurs pour éviter un obstacle quelle que soit sa forme et sa taille… Nous allons filmer les différents parcours.