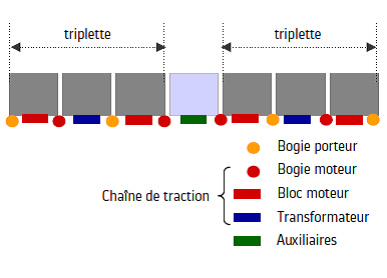
L’AGV à une motorisation répartie c’est à dire que tout les essieux peuvent être moteurs contrairement aux TGV où la motorisation est centrée sur les 2 rames motrices, la motrice ce trouvant à l’avant et à l’arrière du train. Dans un cas réel tout les essieux ne doivent pas être moteurs cela dépend de la puissance voulut. Cette absence est un choix de la SNCF et à montrer ces preuves lord d’accident évitant que les rames ce rentrent les une dans les autres (en porte feuille) sauvant ainsi de nombreuses personnes.
Les moteurs ce trouvant actuellement sur les TGV n’étant pas adapter car étant trop volumineux pour loger dans les bogies il faudrait les remplacer par des moteurs synchrones à aimants permanents beaucoup plus petit, ne transmutant moins de vibrations aux passagers et apportant plus de sécurité et de confort . Cette disposition apporte aussi de l’espace utile donc permet de faire voyager plus de personnes jusqu’à 460 places assises pour une rame de 200 m de long. De plus la masse réduirais de 430 à 395 tonnes par rapport aux TGV actuel, la consommation d’énergie de 15 % et les coûts de maintenance de 30%. Le rapport puissance/poids de l’AGV est aussi très bon de l’ordre de 22kW/h. Enfin son impact environnemental est très faible car il est fait de matériaux recyclables à 98%
La première rame prototype complète, dénommée PEGASE est sortie des usines Alstom d’Aytré en février 2008 pour entamer une campagne d’essais de six mois en République tchèque.
Les principales dates de l’Agv celon alstom créateur de celui-ci
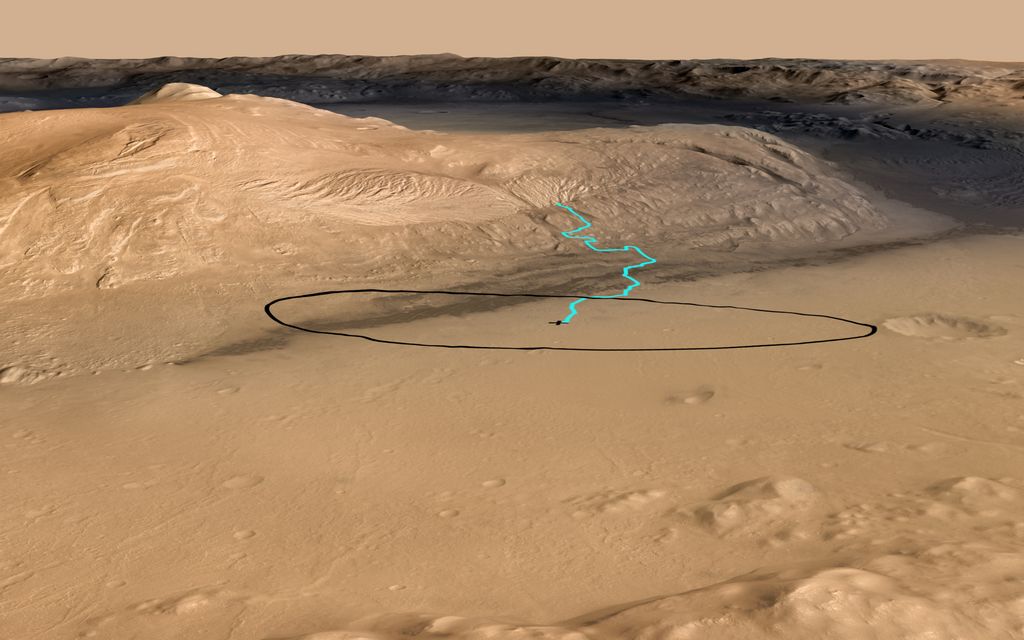
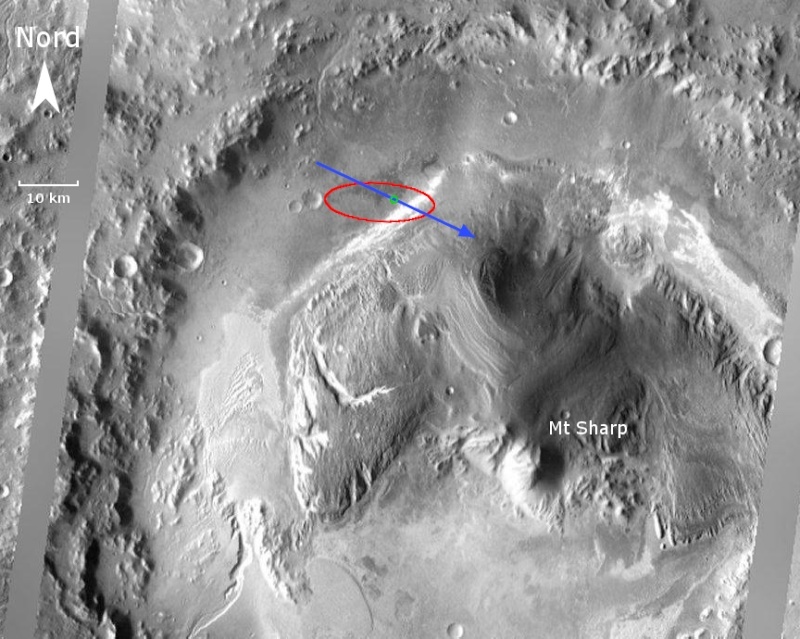
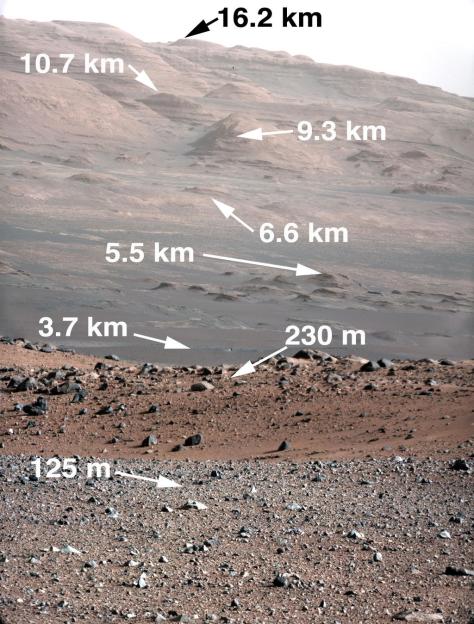
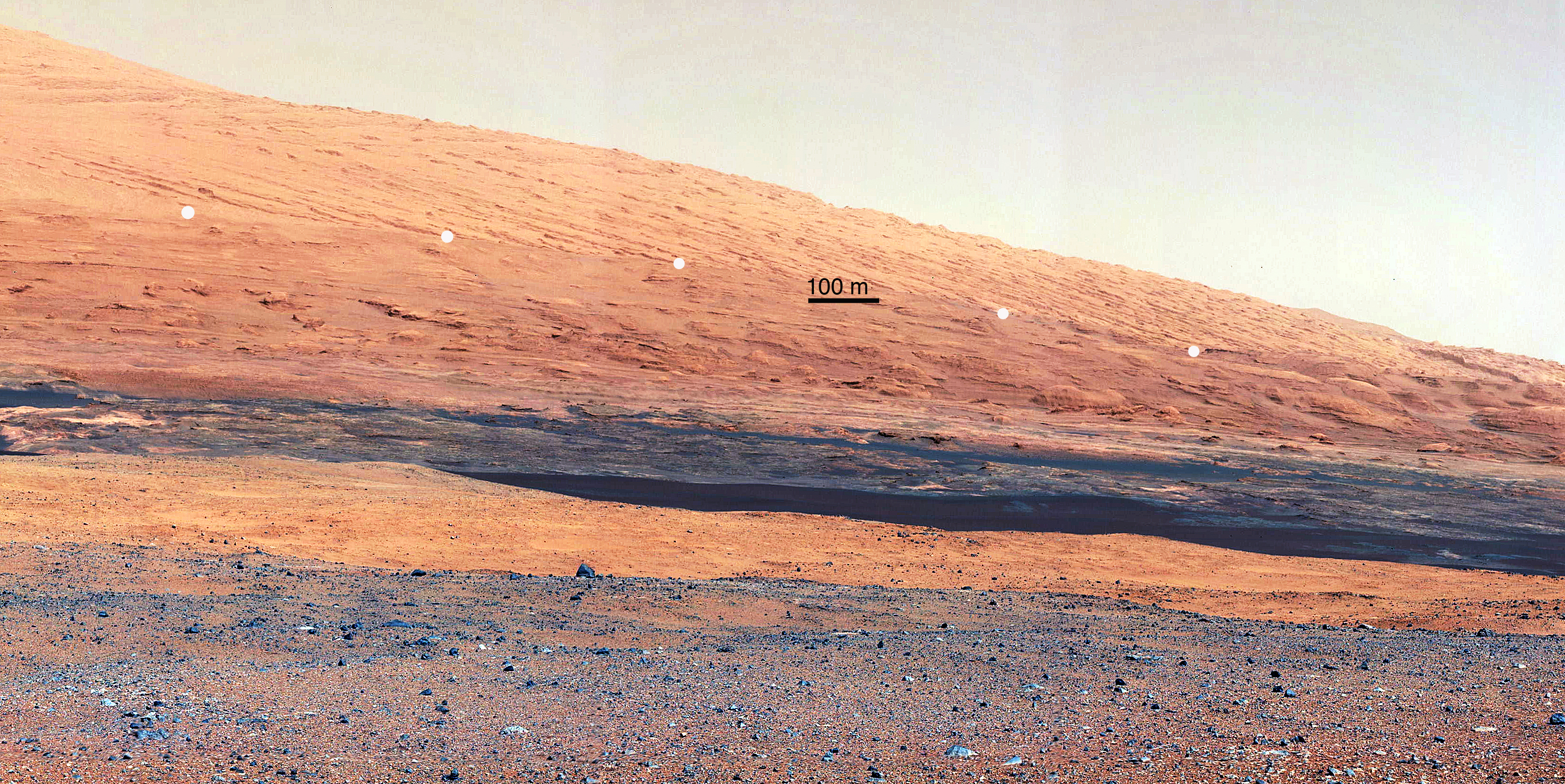
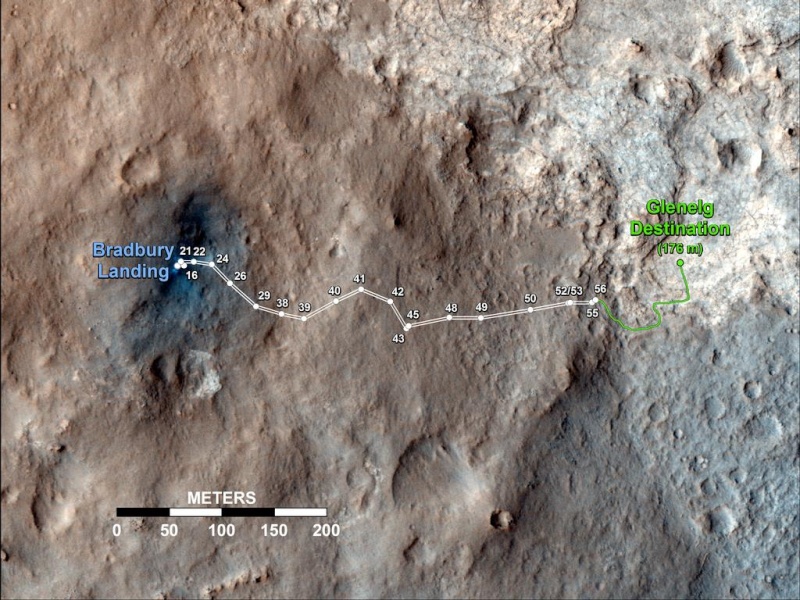
En noir, zone d’aterrissage visée, au pied d’une montagne de plus de 5000m. En bleu, trajet prévu pour aller chercher des argiles dans un canyon à flan de montagne. Source : mars.jpl.nasa.gov
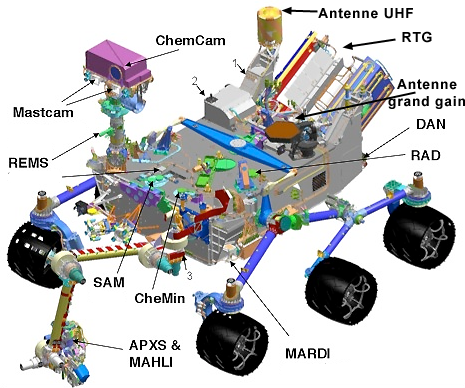
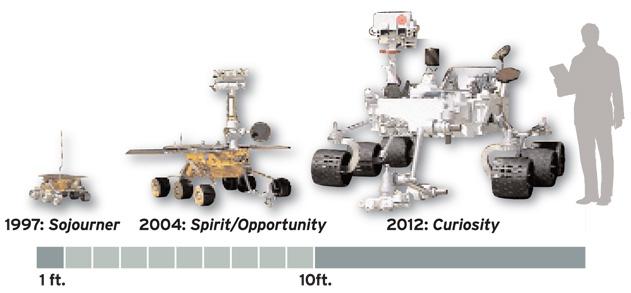
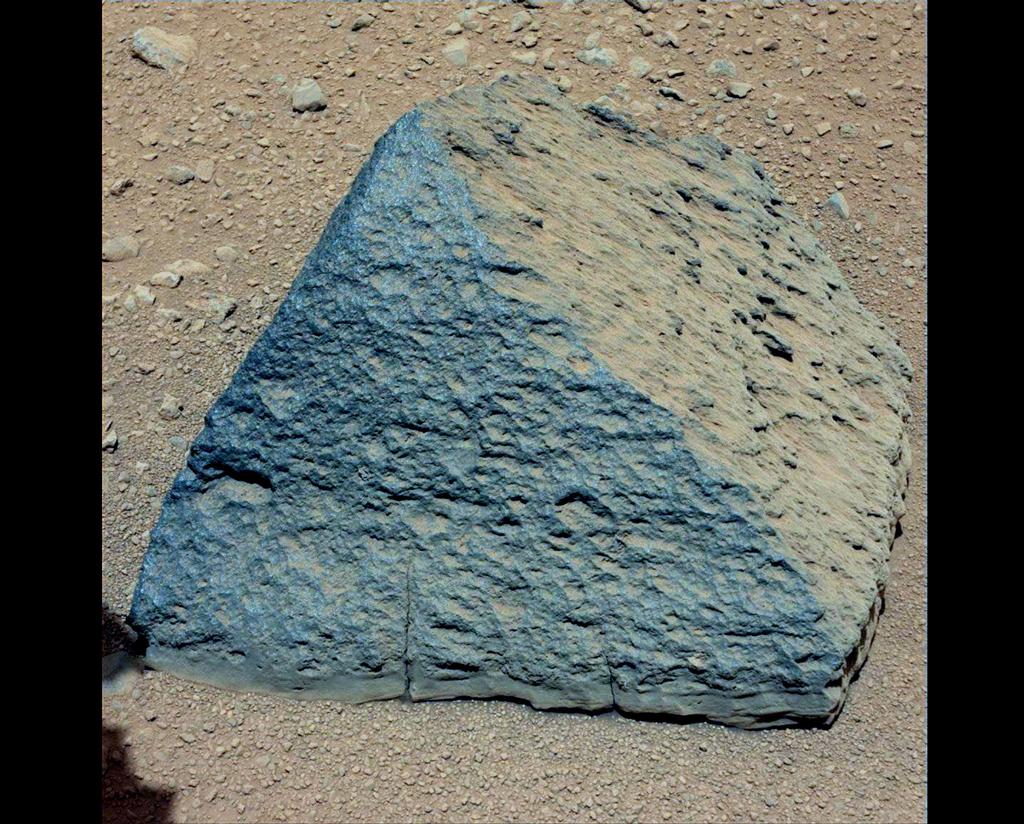
Le robot Curiosity
Le robot Curiosity. Source : Wikipedia
Atterrissage réussi le 5 aout 2012
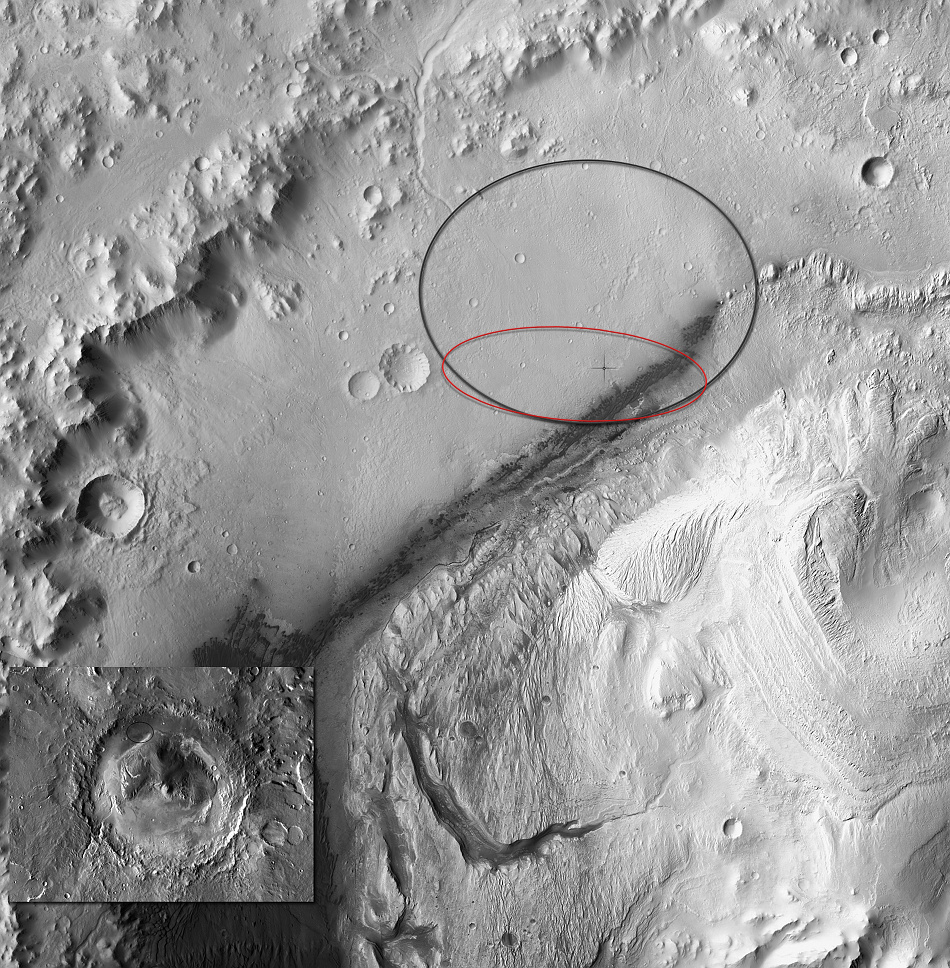
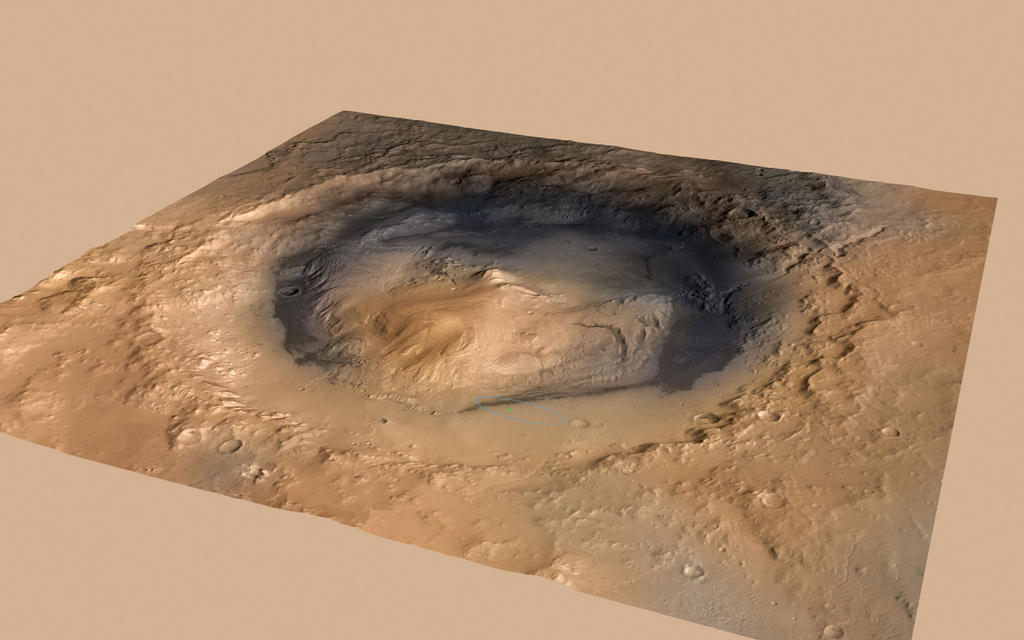
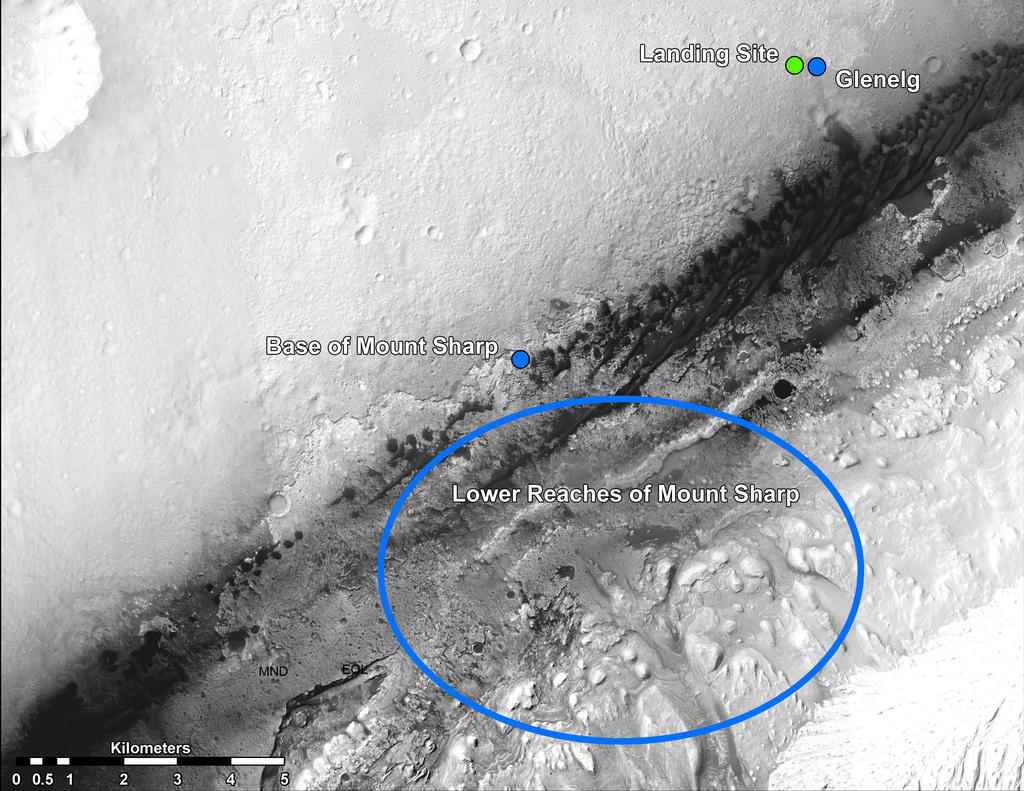
L’élipse bleue au bas de la montagne représente la cible. Le point vert est le point d’aterrissage du robot. Objectif : monter sur la montagne (Mont Sharp à 5500 m d’altitude !)
Planning de début de mission
Le rover est à 8 km de la zone cible à étudier au pied du Mont Sharp
Déploiement de l’antenne grand gain (vers la Terre)
Déploiement du mat
Test des instruments
Transmission de données
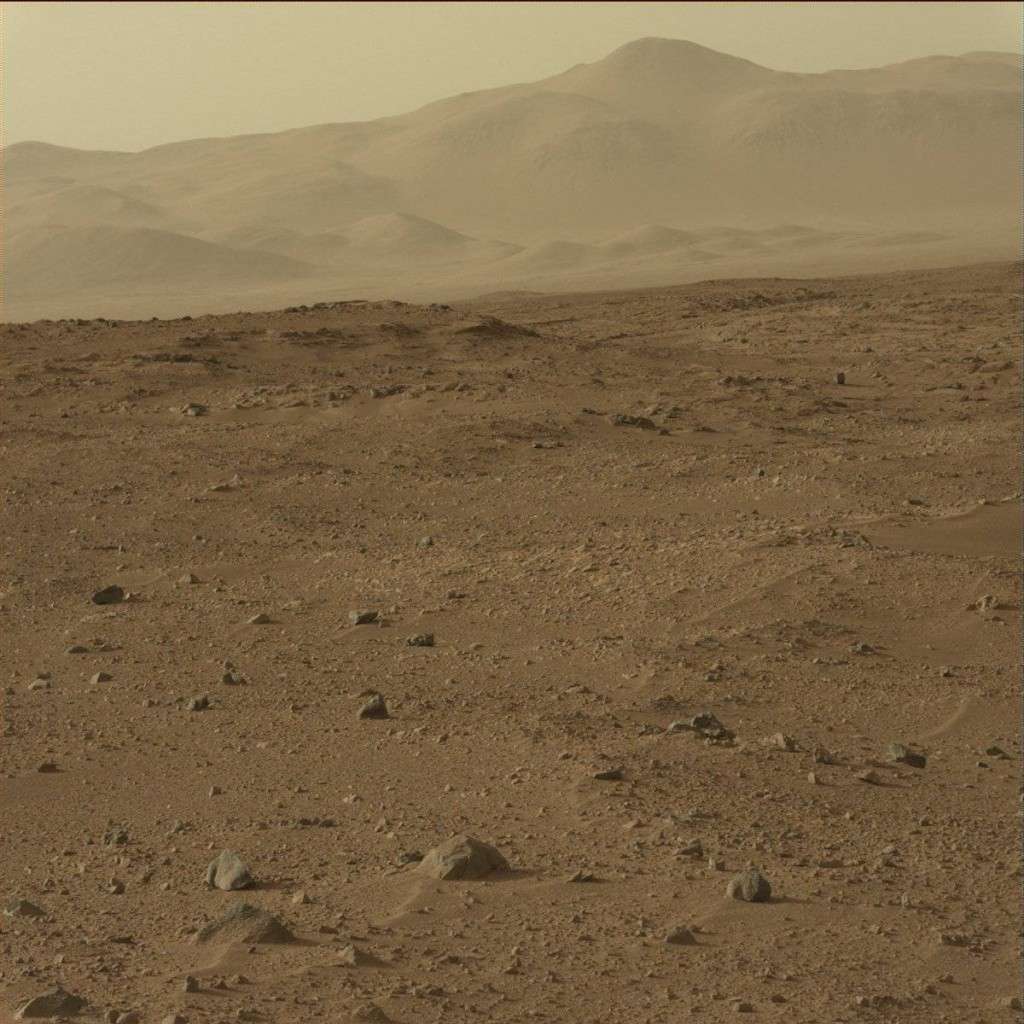
Acquisition d’images panoramiques
Mise à jour logicielle
Test des actuateurs pour faire pivoter les roues
Premiers déplacements
Qualification des instruments du rover (premier mois)
Premières analyses et prélèvements
Environ 50 m par jour : il faudra près de 6 mois pour atteindre le pied de la montagne.
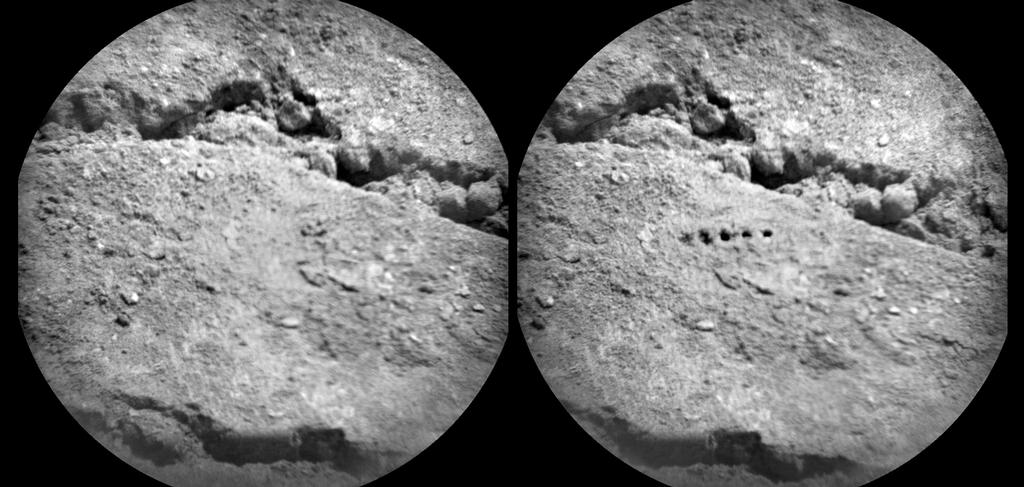
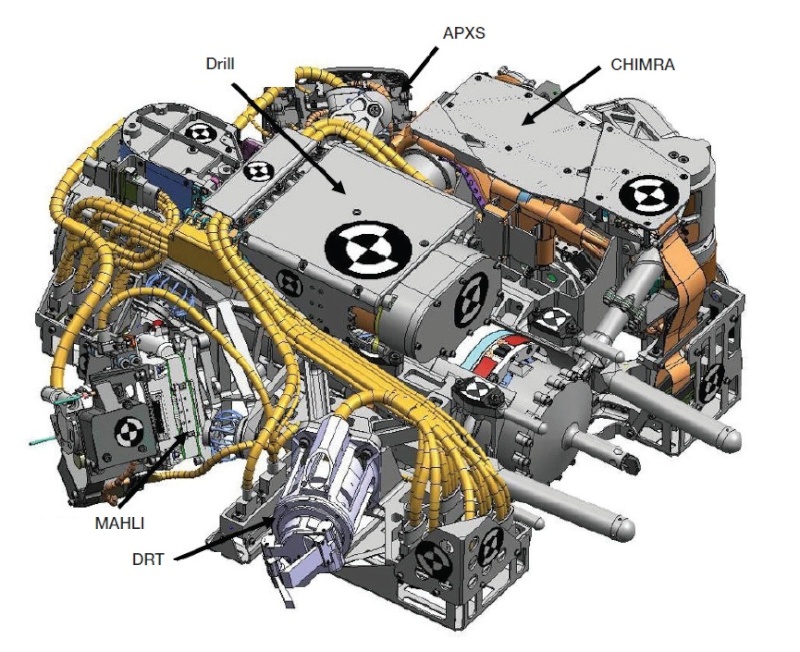
Les mires de positionnement. Cela permet de déterminer où se trouve très précisément la tourelle après déploiement du bras, et mesurer les écarts par rapport aux tests faits sur Terre, ou en simulation.
Lorsque les instruments seront utilisés sur le sol, il faudra savoir pointer la foreuse, par exemple, au millimètre près – voir mieux.
Avant cela, le mouvement du mat – et de sa tête – et donc le pointage des différentes caméras, a été analysé de la même manière par rapport à des mires fixées sur le corps du rover*.
http://www.youtube.com/watch?v=Fix1pJknjbo
Ordinateur de bord
mise à jour des capacités logicielles du rover : suppression des logiciels de l’EDL, remplacés par une version R10 qui contient un version améliorée pour la conduite autonome, l’utilisation des instruments sur le bras, etc… Et il faut mettre à jour le logiciel pour les deux environnements informatiques redondées.
Précisons que le rover est équipé de deux ordinateurs certes, mais, qu’un seul n’est actif à la fois.
Tous deux sont conçus avec le même processeur “BAE RAD750” d’une puissance maxi de 200 mégahertz. Chaque ordinateur est équipé de 2 gigaoctets de mémoire flash, 256 Mo de mémoire vive et de 256 kilo-octets de mémoire effaçable programmable en lecture seule. Aussi, le nouveau logiciel en question a été envoyé alors que le vaisseau spatial était encore sur la route le conduisant à Mars. Depuis vendredi soir les ingénieurs ont commencé à installer la mise à jour R10, d’abord sur un ordinateur, puis sur l’autre. Les quatre jours de mise à jours s’expliquent par le fait qu’ils auront a effectuer des tests sur chaque systeme au fur et à mesure que la MAJ avance, afin de s’assurer que tout va bien.
Oui des données peuvent être perdues ou corrompues pendant le transfert, mais il y a des systèmes de vérification de données qui permettent de savoir si une donnée est valide ou manquante. Dans ce cas ces parties sont réémises.
Ensuite en cas de bug ou autre, c’est tout l’intérêt d’avoir deux UC en parallèles. Ils font la MAJ (après avoir téléchargé et vérifié l’ensemble du prog) sur l’un pendant que l’autre tourne sur l’ancienne version. Ensuite il font tous les tests de l’UC mis à jour et si ça plante ils peuvent reprendre la main avec l’autre et recommencer. Si par contre tout est bon, ils passent à la MAJ du deuxième.
LA MAJ à distance est une méthode qu’ils maitrisent depuis pas mal d’années, et sur certaines missions ils ont même été capable de reprendre la main sur des sondes plantées (bug ou défaillance technique) juste avec un simple “ping”.
Les moyens de télécommunication
L’antenne grand gain fonctionne, l’antenne omnidirectionnelle lui bloque la vue sur une très faible partie de l’arc que fait la Terre dans le ciel martien. C’est juste pas de bol, très peu handicapant, et ça sera réglé dès la première manoeuvre au sol du rover.
une antenne à haut gain (= gros débit) qui est directionnelle (doit être pointée),
– une antenne à faible gain (= faible débit) qui est omnidirectionnelle (pas de pointage).
La seconde sert de “secours” car elle ne nécessite pas d’être déployée ni de bien connaître l’orientation de la sonde.
http://www.youtube.com/watch?v=yKDBojlncss&hd=1
L’énergie de Curiosity
Le principe de base est très simple, le combustible (Plutonium dans ce cas), dégage de la chaleur, le plutonium chauffe et est en contact avec une multitude de thermocouples monté en parallèle/série (utilisation de l’effet thermoélectrique- transformation de la chaleur en courant électrique). Le principe est tellement simple que la fiabilité est maximum, c’est tout sauf une usine à gaz !!!! Faut juste soigner le conditionnement, pas question qu’un atome de 238PuO2 sorte de sa boite…
C’est sûr que ce n’est pas extra puisque la différence de température entre la source chaude et la source froide n’est pas très grande vu que la température d’un RTG plafonne à 1000 °C (soit moins de 1300 K) Toutefois heureusement que les températures sur Mars sont plus basses que sur la Terre , ce qui permet pour la source froide de se retrouver vers -100 °c pendant les nuits (moins de 200 K)
C’est plutôt le rendement des thermocouples qui grève les perfos, c’est la contrepartie à la fiabilité.
Le générateur GTR est prévu pour une durée de 2 ans, mais l’énergie fourni ne permet au rover de ne fonctionner que 6h par jour.
au dela des 2 ans, la puissance va décroitre au point que le rover ne pourra plus trop se déplacer mais plutot envoyer des données basiques (T°, photo, etc) et ce durant 14 ans.
Le MMRTG fournit 120 W en debut de mission, et 100 W au bout de 14 ans.
Le générateur isotopique recharge les batteries la nuit, faire déplacer le Rover de nuit, en même temps que la recharge s’avérerait trop gourmant en énergie…
Il est précisé qu’avec une performance de 42 Ah (x2), ces batteries viendront compléter le générateur nucléaire ( pour simplifier, mais c’est un MMRTG) pour assurer les besoins énergétiques de tous les systèmes de la sonde lors des pics d’activités. Il est attendue que plusieurs cycles de recharges/décharges se produiront chaque sol
En clair, c’est pour rappeler que MSL consomme plus que ce que peut fournir son RTG. Il faudra donc, comme pour Oppy et Spirit, faire le plein d’énergie régulièrement pour assurer les opérations journalières : chauffage électrique des divers actuateurs, fonctionnement des moteurs (de roues par exemple), les instruments scientifiques, le bras, le laser… A la différence des MER toutefois, Curiosity devrait moins craindre l’hiver et les tempêtes de poussière, et son manque d’ensoleillement.
La station météo embarquée sur Curiosity
Tout restera calme d’un point de vue météo sur le site d’atterrissage de Curiosity au cours des prochaines heures. Un ciel clair devrait dominer Gale, mais des tempêtes de poussière seraient désormais évoquées pour un avenir pas si lointain que cela. «Pour la journée de demain nous nous attendons à une journée calme sur Mars avec juste quelques nuages de glace à l’horizon. Les températures extérieures devraient rester douces, c.a.d. – 28°c Celsius, mais du jour au lendemain nous pourrions recenser des températures vraiment plus froides c.a.d. jusqu’à -128°c » annonce Manuel de la Torres. J’ajoute que les vents devraient être calmes et que le ciel devrait être rose.
Notons également que la saison d’hiver touche prochainement à sa fin sur la planète rouge. Au printemps et durant l’été, des tourbillons de poussière/ colonnes tourbillonnantes de poussière agissent comme des tornades. Curiosity est doté d’une station météo sophistiqué qui permettra aux météorologues et autres scientifiques d’étudier ce type de phénomènes.
Deux capteurs seraient reliés à une station météo installés sur le mât du Rover (Là où se trouve sa chemCam), ce qui permettra de mesurer la vitesse du vent, la direction du vent, la température de l’air ainsi que son humidité relative. En outre la température du sol sera également mesurée par ce système. La station météo du robot comporte aussi un dispositif qui mesure la pression de l’air et un capteur qui enregistre six bandes de longueurs d’onde différentes. Les données météo martiennes joueront un rôle clé pour déterminer si la planète est, ou a jamais été, habitable, mais encore si les conditions météo seraient un éventuel conducteur à la formation d’une vie primitive.
Fabriqué en Espagne, la station météorologique du rover pourra également fournir aux scientifiques des données essentielles pour le bon déroulement de sa mission. Le rover Curiosity a atterri lundi matin, sa station météo ae été mis sous tension presque immédiatement. Au cours des deux prochaines années, la station météo enregistrera des données sur moins cinq minutes toutes les heures. (belle perfo). De T.Hadvorson traduit et adapté par Sidjay pour FCS.
La station météo du Rover (Rover Environmental Monitoring Station (REMS)) est d’origine espagnole comme je le disais plus plus haut. (elle serait déjà en route depuis le 06 Aout à priori)
Elle a été conçu pour enregistrer six paramètres atmosphériques différents:
– Vitesse du vent / direction.
– Pression.
– Humidité relative.
– Température de l’air.
– Température du sol.
– Rayonnement ultraviolet.
Elle se compose de:
– Deux capteurs fixées à environs 1,5 m au-dessus du niveau du sol via le mât mobile principal du Rover.
– D’un capteur de rayonnement ultraviolet (UVS) situé sur le pont supérieur du rover.
– D’unité de contrôle (USI) située à l’intérieur.
Les deux rampes de capteurs sont séparés par un azimut de 120 degrés pour aider à assurer qu’au moins l’un d’eux puisse enregistrer les données de vent. La figure ci-dessus illustre cela par ailleurs. Notez également qu’il ya une différence de hauteur de 50 mm entre les deux rampes de capteurs (ou Boom), afin de minimiser toute perturbation relative entre deux vents.
La Rampe 2 (à droite sur le dessin) a été installé dans l’axe d’entraînement du robot.
Elle est muni de capteurs dédié aux études éoliennes, mais intègre également le capteur d’humidité.
La rampe 1 (à gauche sur le dessin) est très légèrement installée en direction de l’arrière droit du rover. Elle intègre une autre série de capteurs-vent et mais aussi le capteur de température du sol. Les deux rampes intègrent en revanche un capteur de température de l’air chacune.
Il y a deux sondes placées perpendiculairement sur le mat, l’un d’entre eux – et l’un des capteurs de mesure de la vitesse des vents – semble avoir été endommagé par la projection des gravillons lors de l’atterrissage : les connections avec ce capteur semblent avoir été rompues.
– Une page sera mise en ligne avec les données météo
Le LP2I a reçu aujourdhui, lundi 31 janvier, une voiture électrique offerte par la région Poitou-Charente.
La région Poitou Charentes soutien la voiture électrique, et en particulier la Mia produite par Heuliez dans notre région : voir son site ici. Cette news sur le site de la région Poitou Charentes évoque l’acquisition de 100 voitures électriques pour équiper la région et les lycées.
Cette petite voiture électrique servira au LP2I comme voiture de service (apporter le courrier à la poste, faire une course, faire un déplacement localement, …). Le modèle reçu ne dispose que de 3 places avec une autonomie de 80 à 130 km suivant le pack de batterie choisi () préciser). Elle peut être acheté par un particulier au prix de 20 000 € environ mais un bonus de 5000 € est accordé pour les voitures électriques.
Les premiers essais aujourd’hui au LP2I avec les conditions enneigées actuelles semblent montrer une bonne tenue de route de cette petite voiture électrique.
La Mia électrique reçue le 31/01/2012 au LP2I, offerte par la région Poitou-Charentes (Photo LP2I)La Mia électrique du LP2I (Photo LP2I)
La Mia électrique du LP2I (Photo LP2I)
Premier essai de charge de la Mia électrique que l'on branche sur une prise standard (Photo LP2I)
La Mia 3 places, une petite voiture de 2m87 avec deux portes coulissantes (source : mia-voiture-electrique.com)
L'intérieur de la Mia en version 3 places comme celle du LP2I (Source : mia-voiture-electrique.com)
Jeudi 12 janvier, les élèves de seconde intéressés par la filière STI2D ont pu s’inscrire à une présentation d’activités faites cette année en première STI2D.
9 élèves de seconde ont répondus présents. 5 élèves de première STI2D ont présenté 3 activités en faisant tourner les élèves toutes les 10 à 15 minutes.
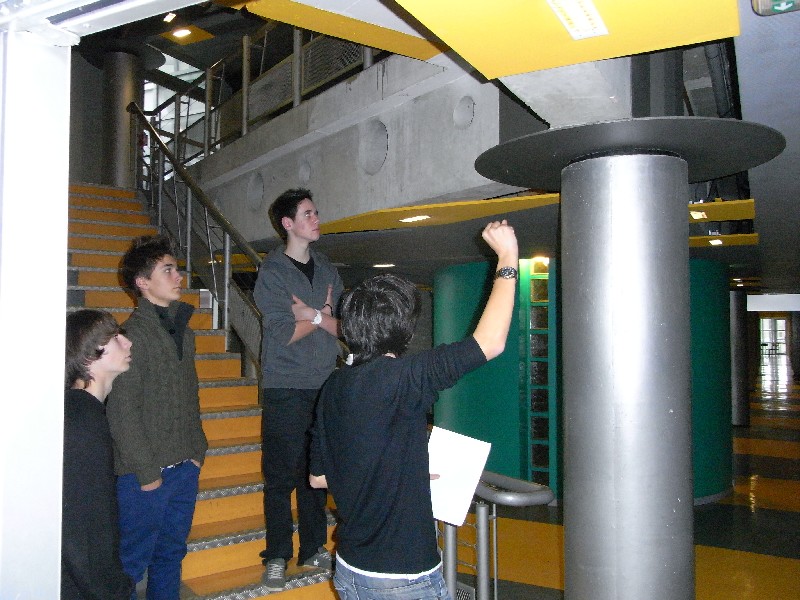
– La structure porteuse du LP2I présentée par Marc.
Marc (1ère STI2D) explique comment la dalle en béton s'appuie sur des poutres des poutres, en appui elles-même sur des poteaux (Photo LP2I).
Marc montre le pont roulant et explique comment et pourquoi il est accroché sur le dessus des poutres en béton, ce matériaux devant travailler en compression plutôt qu'en traction. (Photo LP2I)
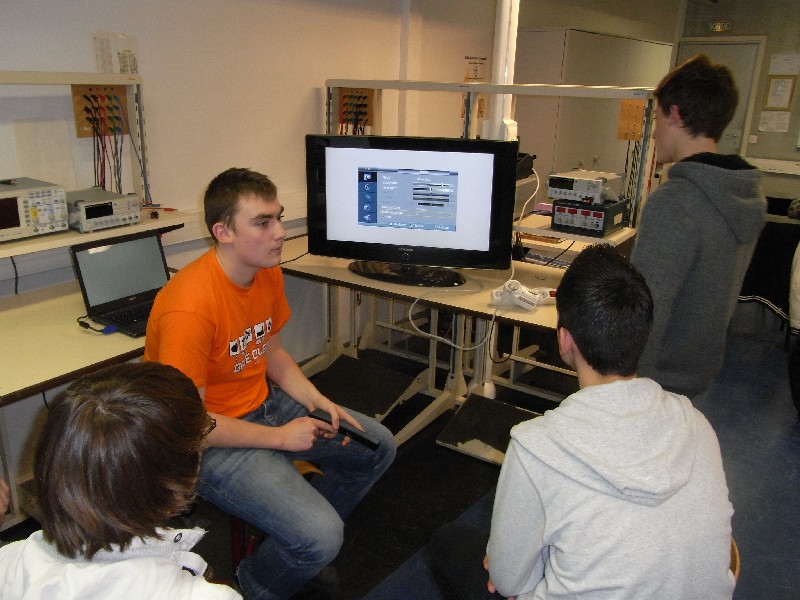
– La télévision LCD présentée par Brice et Edouard.
Brice et Edouard (1ère STI2D) expliquent à des élèves de seconde pourquoi la consommation de la télévision est la même que l'image soit un fond blanc ou noir. (Photo LP2I)
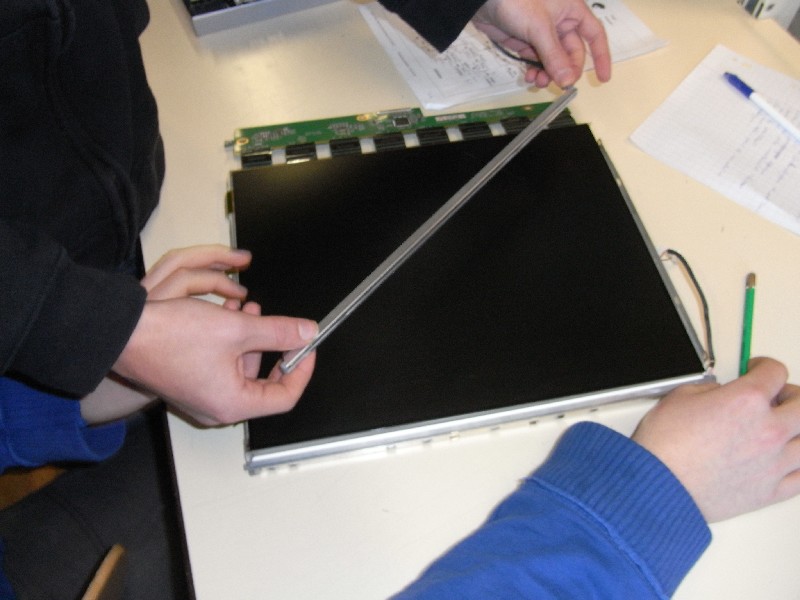
Un écran LCD de PC 17 pouces. Un des deux tubes fluorescents assurant le rétroéclairage est démonté. (Photo LP2I)
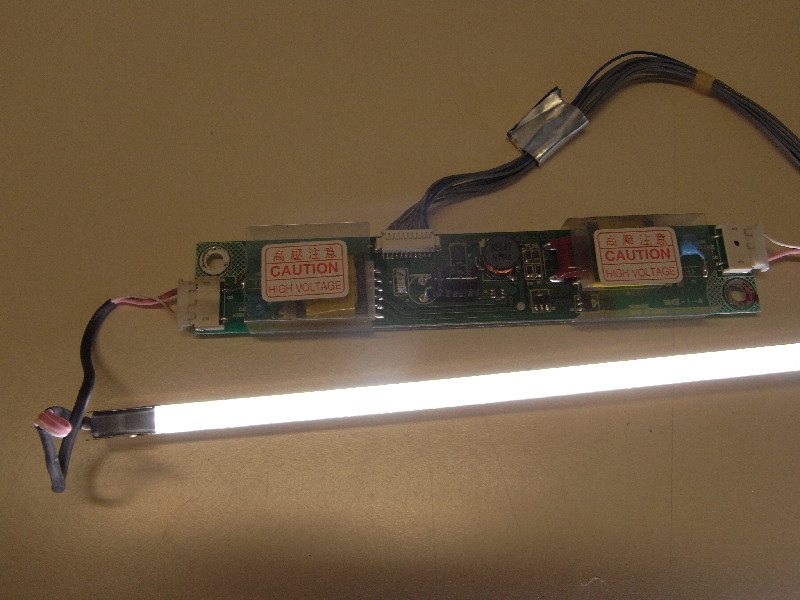
L'alimentation des tubes fluorescents d'un écran LCD de PC. (Photo LP2I)
Le tube fluorescent d'un écran LCD de 15 pouces d'un PC portable. Son circuit d'alimentation derrière. (Photo LP2I).
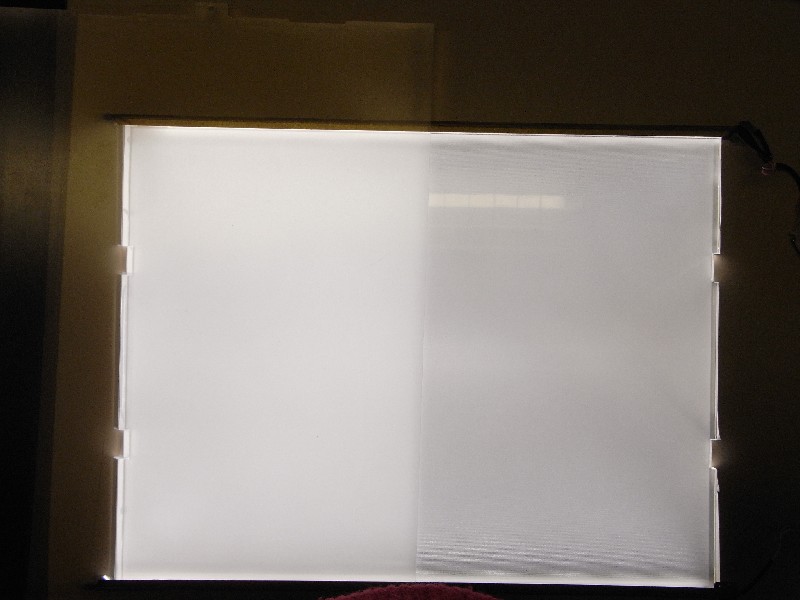
Rétoéclairage d'un écran de PC. On voit à gauche l'influence d'une feuille de plastique (absente à droite) qui concentre la lumière vers l'avant pour améliorer le rendement luminaux. (Photo LP2I)
– Le blog de la STI2D au LP2I présenté par Artur et Brandon.
Artur et Brandon (1ère STI2D) présentent des articles écrits et publiés par les élèves de la classe sur le blog de la STI2D au LP2I. (Photo LP2I)
Lors d’une journée consacrée à l’orientation, les élèves de la classe de 1ère STI2D ont présenté leur filière aux élèves des classes de secondes du LP2I vendredi 6 janvier. Un diaporama avait été préparé en commun à partir des idées des élèves, avec l’aide de M Pers (professeur d’enseignement technologique transversal) pour la mise en forme.
Qualcomm a créé une puce à quatre cœurs snapdragons S4
les nouvelles puces 4 cœurs de chez Qualcomm: www.lemondeinformatique.fr
qui remplace ses précédentes S1, S2 et S3
Les ancienne puces de chez Qualcomm : qualcomm.fr
Les quad-core qui apparaitront chez la plupart des fondeurs ARM, seront capables d’animer les tablettes équipées de Windows 8. Les puces sont basées sur l’architecture ARM, ces processeurs tourneront à des vitesses comprises entre 1,5 et 2,5 Ghz. Elles sont prévues milieu 2012. Le cœur graphique Adreno de Qualcomm, soutiendra la technologie multimédia de Windows 8.
Fonctionnement des puces Snapdragons sur des tablettes tactile.
Le Snapdragon S4 MDP tablette est l’une des premières que nous avons vu de Qualcomm qui est assez élégante pour fonctionner comme une tablette primaire. elle ne sera pas bon marché, si le prix n’a pas encore été annoncé, mais pour les développeurs qui ont besoin d’une plateforme complète pour le test de leurs applications Android, il n’y a aucun doute que c’est une excellente option.
Ses fonctionnalités
La classe Snapdragon S4 comprendra la nouvelle génération de processeurs Snapdragon et mettra en vedette un nouveau processeur et une micro-architecture 3G/LTE intégrés multimodes. La S4 restera fidèle à ses racines en fournissant la puissance de travail et la faible consommation d’énergie, soit une diminution de 65% de sa consommation avec une augmentation en même temps de la performance de 150%. Ce combo va créer des produits mobiles qui offrirons un graphisme comparable aux consoles de jeu actuelles. Le Snapdragon processeur S4 sera un nouveau facteur de forme et de l’exécution d’un système complet d’exploitation de bureau.
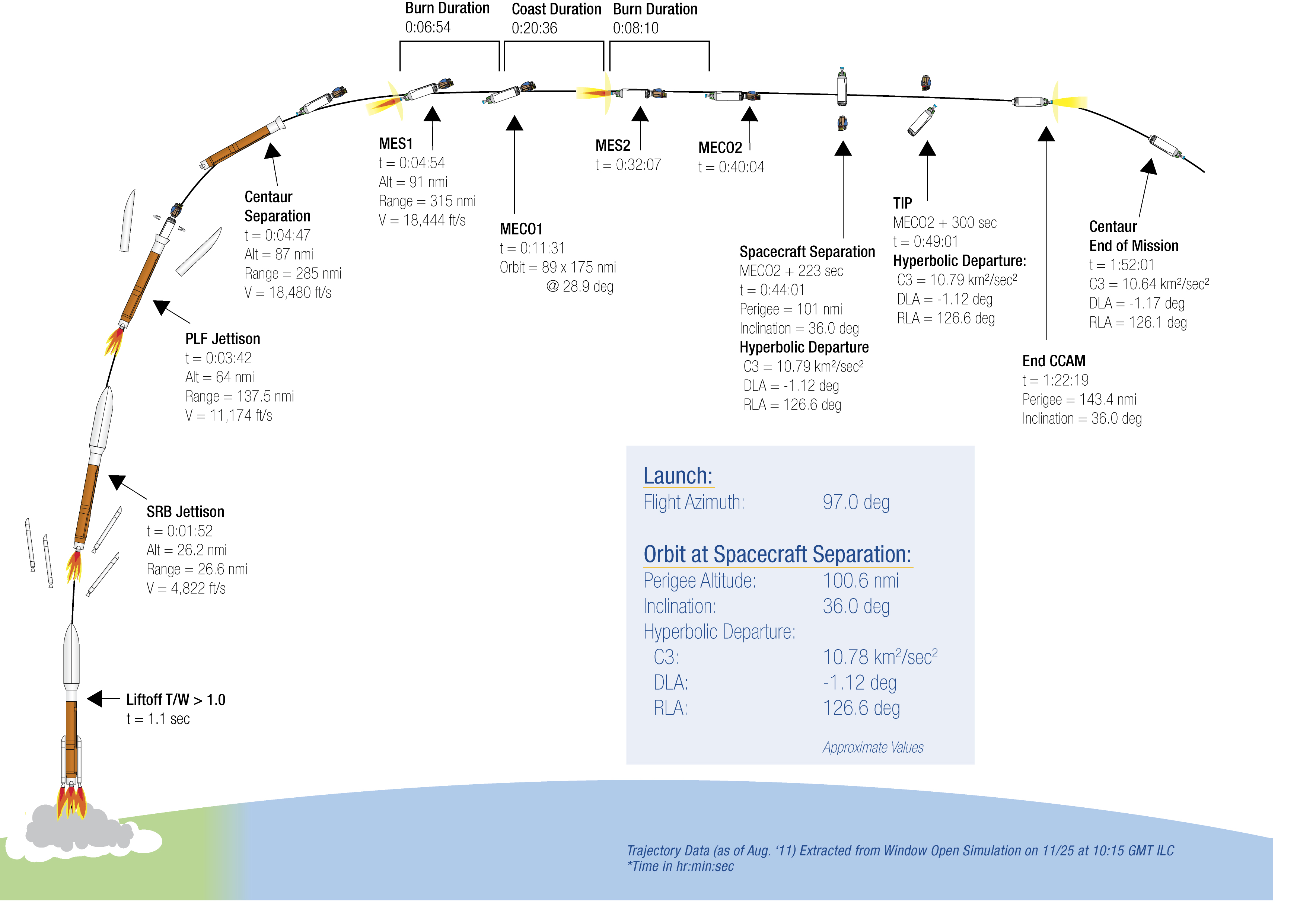
Décollage le 26 nov à 16h02 de la fusée Atlas avec le robot MSL à son sommet (source : nasa.gov)
Après le décollage à 16h02 de la Floride, le lanceur a été mis en orbite terrestre, puis le robot MSL Curiosity s’est séparé de son lanceur à 16h45 en direction de Mars. Arrivée prévue sur Mars le 6 août 2012.
Séquence du décollage, de la mise en orbite terrestre, puis de l’injection vers Mars :
Séquence de lancement de la mission MSL vers Mars le 26 nov. 2011 (source : nasa.gov)
Vidéo sur youtube de la séparation avec le lanceur
Le robot est accroché derrière le module de croisière dont on voit les panneaux solaires depuis une caméra embarquée sur le lanceur. L’ensemble tourne sur lui-même. D’où une ombre qui se déplace en tournant également.
Après séparation, le voyage durera 8 mois et demi avec 3 corrections de trajectoire avec des petits moteurs (fusées). Pour le moment, le module de croisière vole sans ses moteurs. Il n’est plus attiré par la terre mais par le soleil.
Voyage vers mars (source : Wikipedia)
Beau succès pour la Nasa pour sa mission la plus ambitieuse de ces dix dernières années. Le budget total de la mission MSL est actuellement de 2,5 milliard de dollars. La France participe avec deux appareils scientifiques embarqués dans le robot.
Le robot Curiosity de la NASA, attend le lancement au sommet d’une fusée Atlas V à Cap Canaveral, en Floride (source : masa.gov, image : Pat Corkery, United Launch Alliance)
La NASA a reporté le décollage de la mission vers la planète Mars au samedi 26 novembre à 16h02 (heure française) à cause d’un problème de batterie défectueuse du lanceur.
Le site de wikipedia présente bien la mission MSL à partir d’informations de la NASA.
Le site de la Nasa est très complet sur cette mission MSL, mais en anglais.
Des techniciens travaillant sur le robot MSL Curiosity (source Nasa.gov)
Le robot MSL Curiosity et sa caméra Laser (source : Nasa.gov)
Vidéos de présentations (version courte de 4 min et version longue de 11 min).











































{kind=link}