Mise à jour du 22 février 2016
Je constate aujourd’hui que de plus en plus d’enseignants s’intéressent à Ardublock, mais il faut avoir conscience que ce logiciel est en fin de vie. Il n’est plus maintenu depuis longtemps et presque plus personne ne développe de nouvelles fonctionnalités d’Ardublock.
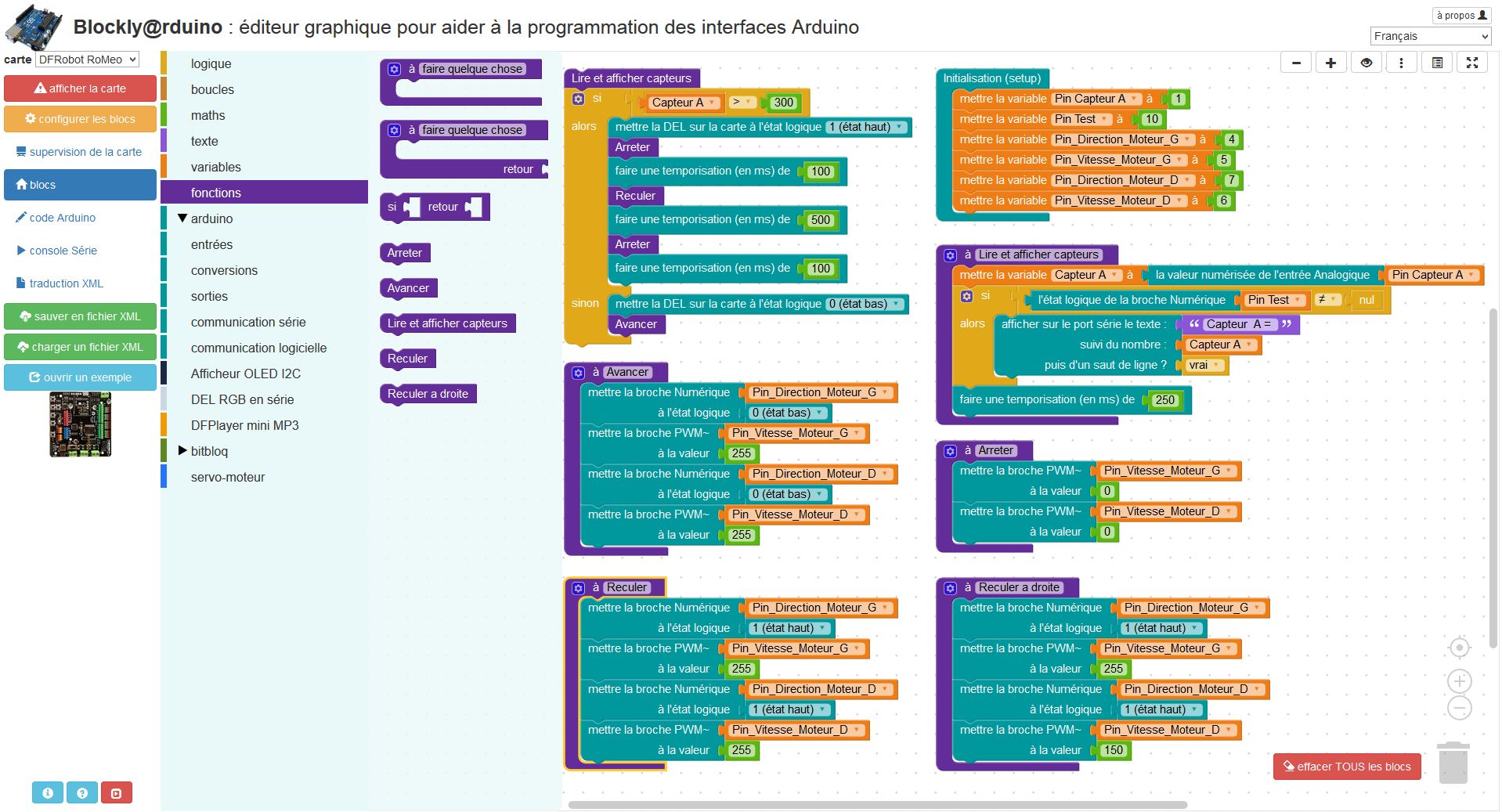
Depuis maintenant deux ans environ, de nouveaux logiciels de programmation ont été développés, la plupart à partir de Blockly conçu spécialement par Google pour faciliter justement le développement de ce type de logiciels pédagogiques. On trouve aujourd’hui des logiciels capables de remplacer avantageusement Ardublock. J’ai choisi d’utiliser Blockly Arduino qui a entre autre l’avantage de pouvoir facilement s’adapter à mes besoins pédagogiques. J’ai rédigé un article qui vous expliquera plus précisément les avantages de Blockly Arduino par rapport à Ardublock, ainsi que les points à améliorer prochainement.
La suite de cet article date de juin 2015 : considérer qu’aujourd’hui Ardublock peut avantageusement être remplacé par Blockly Arduino !
Objectifs
Identifier les principales solutions techniques utilisées dans la chaîne d’information d’un système automatique. Analyser notamment comment la carte électronique programmable d’un robot reçoit des informations à partir de capteurs, et comment elle génère des commandes pour permettre au robot d’assurer sa fonction de manière autonome.
Le robot choisi pour cette activité est en cohérence avec le thème “confort et domotique” de l’enseignement de la technologie en 4e. Il s’agit d’un robot aspirateur. On en trouve de toutes sortes à des prix plus ou moins élevés. L’achat d’au moins deux robots aspirateur (un fonctionnel, un à démonter) peut néanmoins poser problème vu les budgets de la Technologie au collège. J’ai utilisé des robots prêtés par mon lycée. Ce sont des robots Auto Cleaner présentés ci-dessous.
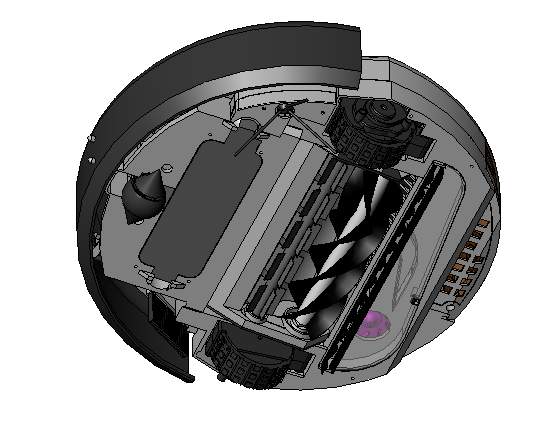
Le robot aspirateur Auto Cleaner est prévu pour nettoyer le sol d’une habitation de manière autonome.
Il s’adapte à son environnement à l’aide de capteurs. Il peut ainsi modifier sa trajectoire et couvrir complètement la surface à nettoyer.

Modelisation 3D du robot aspirateur Auto Cleaner (source )
Modelisation 3D du robot aspirateur Auto Cleaner. Vue de dessous (source )
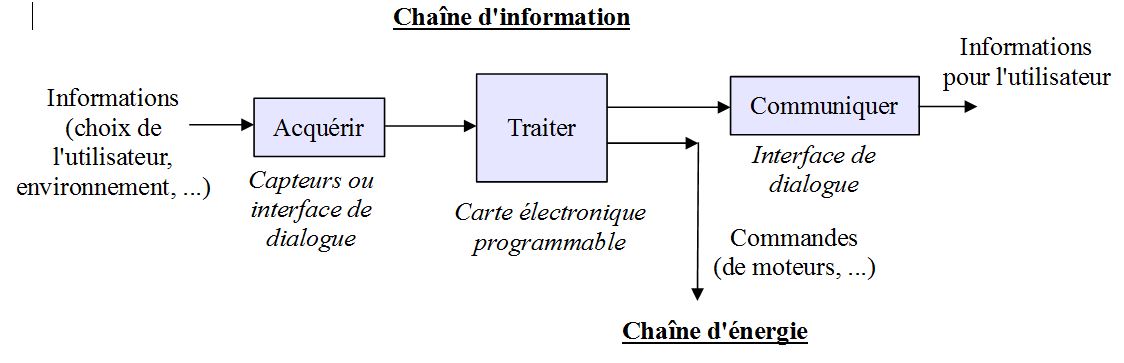
Chaîne d’information
– J’ai introduit progressivement la notion de chaîne d’information en analysant des objets techniques tels que machines à laver le linge, ordinateurs, télévisions, ascenseurs, portes automatiques, robot aspirateur, … L’élève découvre que ces objets sont capables notamment de gérer automatiquement des informations.
– Le traitement de l’information est réalisé généralement par une carte électronique programmable comportant un processeur.
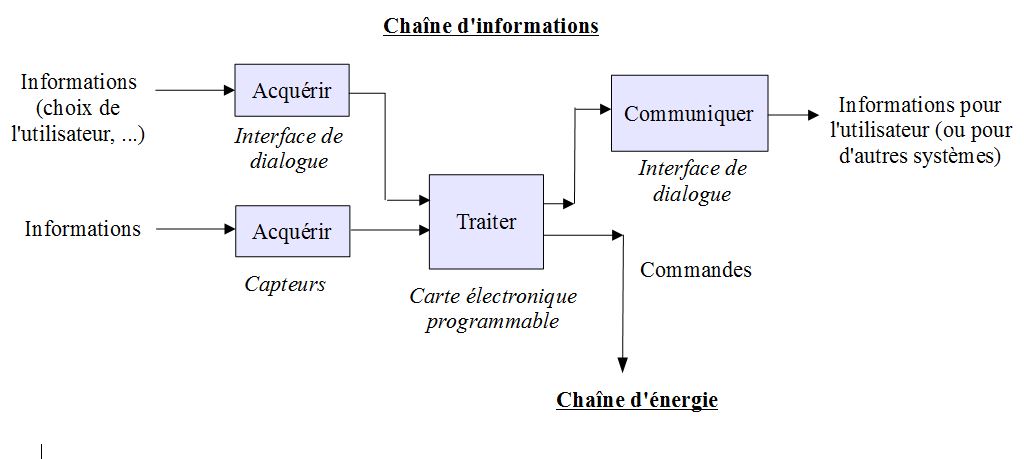
. Les informations en entrées sont issues de l’utilisateur ou de capteurs qui permettent d’acquérir des d’informations sur son environnement.
. Les informations en sorties sont communiqués à l’utilisateur, ou correspondent à des commandes pour la chaîne d’énergie (vitesse et direction des moteurs, …).
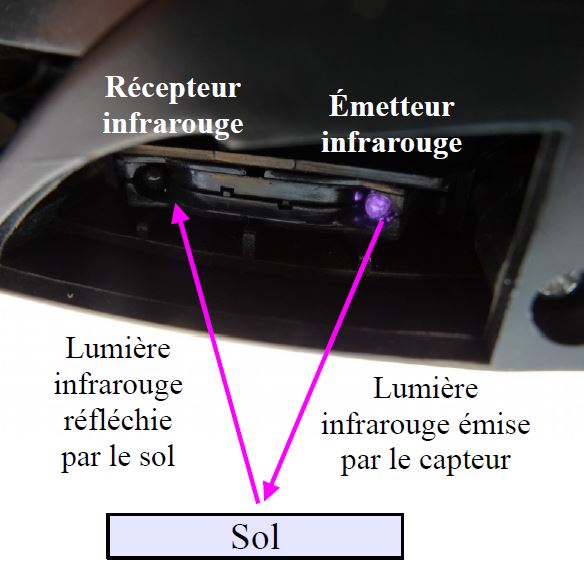
– Un premier schéma fonctionnel de la chaîne d’information est introduit à partir des analyses antérieures, notamment l’analyse d’une porte d’ascenseur (avec l’introduction de carte électronique programmable et de la notion de capteur optique infrarouge). Le schéma fonctionnel permet de mieux préciser les objectifs de l’investigation expérimentale sur le robot aspirateur et sur la carte Arduino.
Technologies électroniques et informatiques utilisées
– Pour réaliser cette chaîne d’information, les solutions techniques utilisent des technologies électroniques et informatiques : des cartes électroniques avec des circuits intégrées (des processeurs notamment), des programmes,… J’ai introduit progressivement ces technologies en permettant aux élèves de démonter divers objets (donnés par les parents), …
– Approche historique : j’ai aussi utilisé des extraits vidéo sur les débuts de l’électronique et de l’informatique modernes lors de la conquête spatiale américaine dans les années 60 (sujet motivant pour de nombreux élèves, mais souvent méconnu) :
Première partie de la vidéo
Deuxième partie de la vidéo
Troisième partie de la vidéo
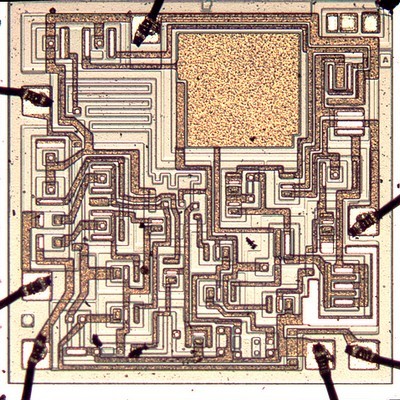
– Technologies électroniques
J’ai présenté aux élèves des cartes électroniques et des circuits intégrés (notamment des tranches de silicium et un circuit intégré dont le boîtier permet de voir la puce qu’il contient).
Document pdf de synthèse sur les technologies électroniques :
Synthèse Technologies électroniques 201114

Document pdf sur l’évolution de la télévision (et des technologies électroniques) :
Evolution de la télévision du 311014
Analyse d’un robot aspirateur
– Mise en œuvre d’un robot aspirateur avec analyse de deux modes de fonctionnement (modes S et L). Travail oral en classe entière sur l’analyse fonctionnelle, sans préciser les solutions techniques..
– Investigation par équipes sur les solutions techniques, guidée par un document avec des consignes et des questions :
Analyse du robot aspirateur 100215
Analyse du robot aspirateur 180515 correction
Expérimentation avec une carte électronique programmable : partie 1
– Identification de la fonction « Traiter les informations » dans le robot aspirateur : elle est réalisée par une carte électronique programmable. Ce traitement des informations est réalisé par un processeur (circuit intégré) qui exécute un programme.
– Présentation d’une carte électronique programmable Arduino Leonardo
Le matériel conseillé pour ce genre d’activité est présenté dans ce document pdf :
Matériel conseillé compatible Arduino 190515
L’installation d’Arduino et d’Ardublock est présenté dans ce document :
Installation d’Arduino et d’Ardublock
ArduBlockTool.zip
– Conception et test d’un premier programme avec le logiciel Arduino (+ Ardublock) et une carte Arduino
Objectif de ce premier programme : Voir expérimentalement comment une carte électronique programmable permet de commander une LED de manière à obtenir un clignotement comparable à celui de l’aspirateur robot lorsqu’il est en charge.
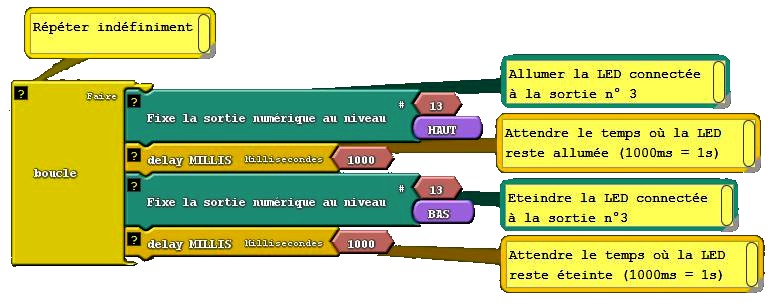
– Structure du programme (algorithme) permettant de faire clignoter la LED :
Répéter indéfiniment
Allumer la LED
Attendre le temps où la LED reste allumée
Éteindre la LED
Attendre le temps où la LED reste éteinte
– Mise en œuvre par binômes du matériel et du logiciel Arduino + Ardublock pour écrire et tester ce premier programme :
Document avec les consignes détaillées :
Expérimentation avec une carte électronique programmable Partie 1 du 100615
Ensemble des programmes pour Ardublock correspondant à l’investigation sur le robot aspirateur :
Programmes Ardublok Aspirateur robot.zip
– Programme 1 obtenu avec Ardublock
Expérimentation avec une carte électronique programmable : partie 2
– Mise en œuvre par binômes du matériel et du logiciel Arduino et Ardublock pour écrire et tester les programmes 2 et 3 :
Document pdf avec les consignes détaillées :
Expérimentation avec une carte électronique programmable Partie 2 du 100615
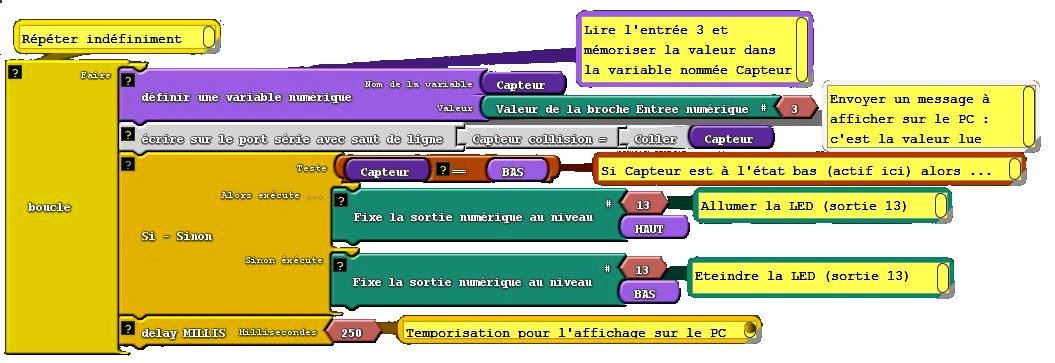
– Programme 2
– Programme 3
Expérimentation avec une carte électronique programmable : partie 3
– Mise en œuvre par binômes du matériel et du logiciel Arduino et Ardublock pour écrire et tester les programmes 4 et 5 :
Document pdf avec les consignes détaillées :
Expérimentation avec une carte électronique programmable Partie 3 du 100615
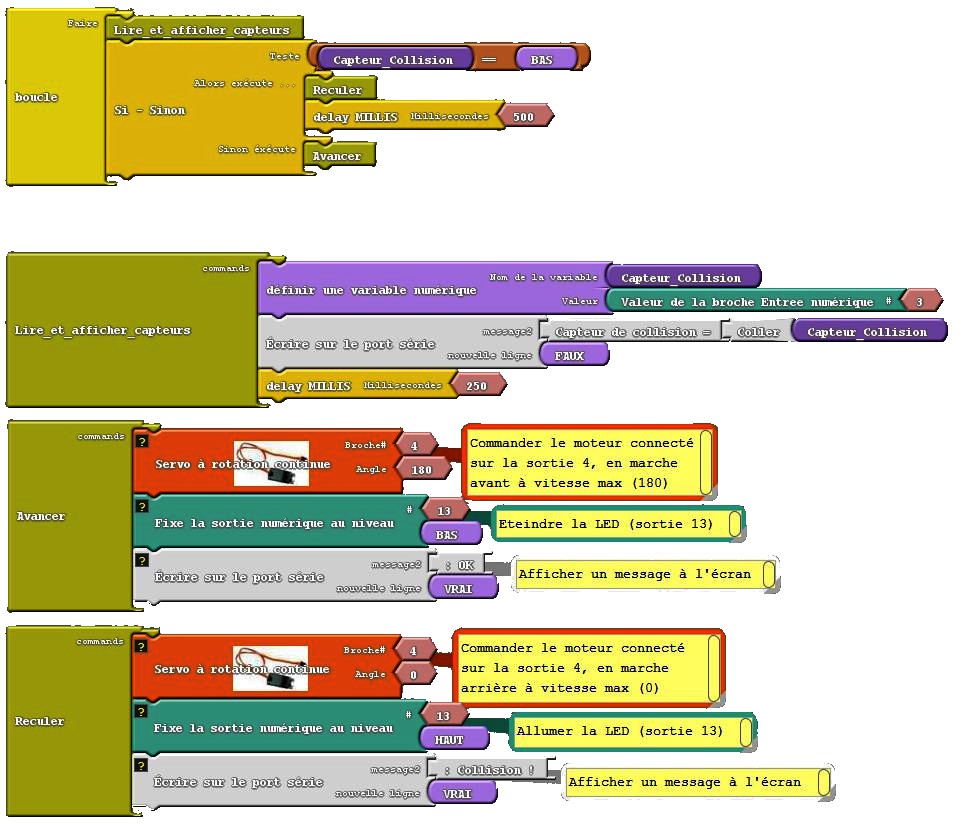
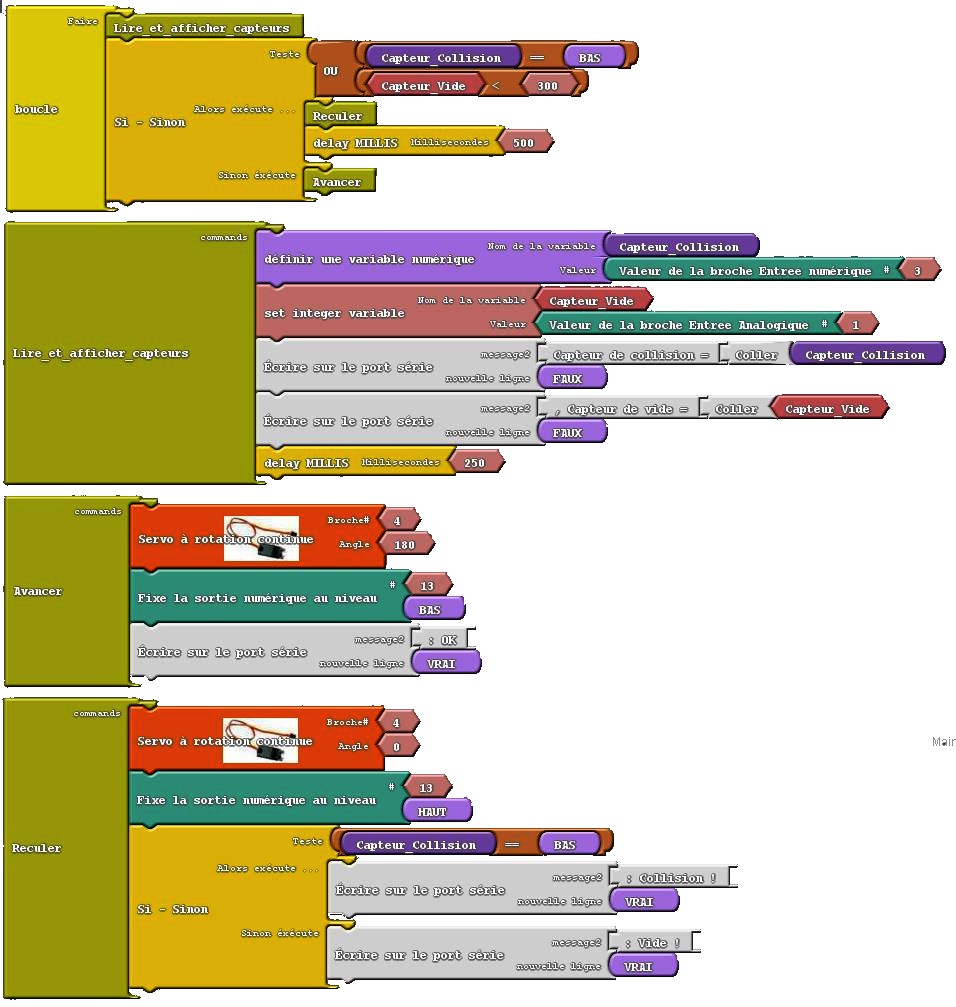
– Programme 4
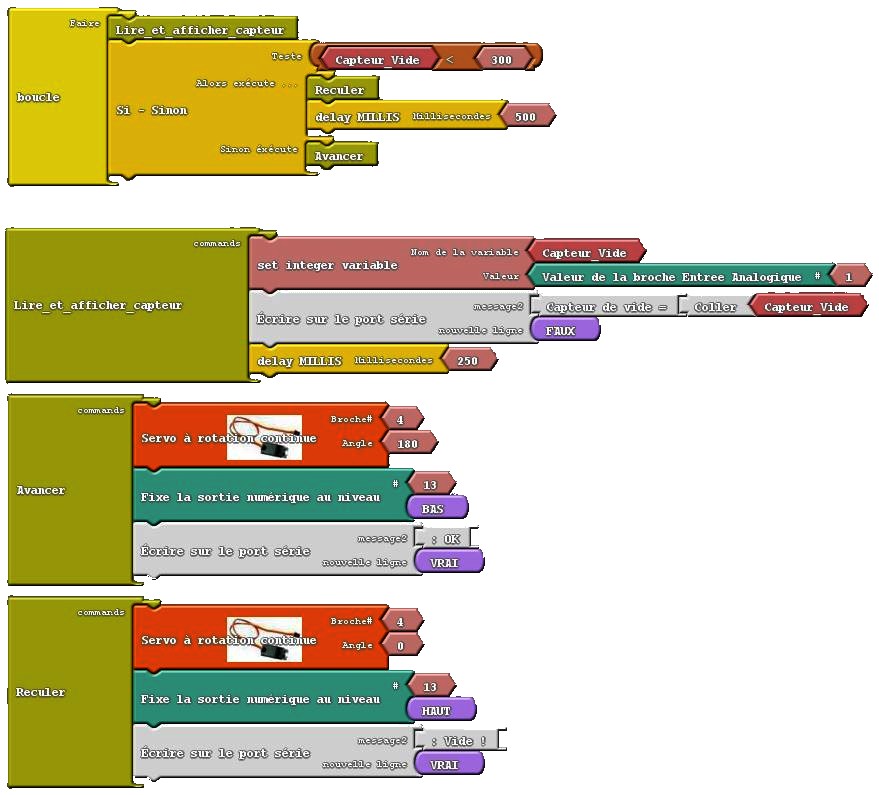
– Programme 5
Autres expérimentations possibles
Au lieu d’un simple petit servomoteur, il est possible d’utiliser un vrai robot avec des moteurs (motoréducteurs) à courant continu comme le modèle ci-dessous que je trouve très intéressant, pour 24.50€ seulement, par exemple pour un projet en classe de 3e :
http://www.gotronic.fr/art-chassis-eco-dg008-17741.htm

Châssis éco DG008 à 4 roues motrices, 4 à 5 R6, 1.3 km/h (36 cm/s), 190 x 150 x 70 mm, roues 65 mm (Source : gotronic.fr)
La carte Arduino Roméo est alors assez bien adaptée car elle intègre une interface de puissance compatible avec la plupart des motoréducteurs à courant continu utilisés dans ce genre de robots. La carte Arduino Roméo possède deux sorties permettant de commander les moteurs du côté droit indépendamment des moteurs du côté gauche.
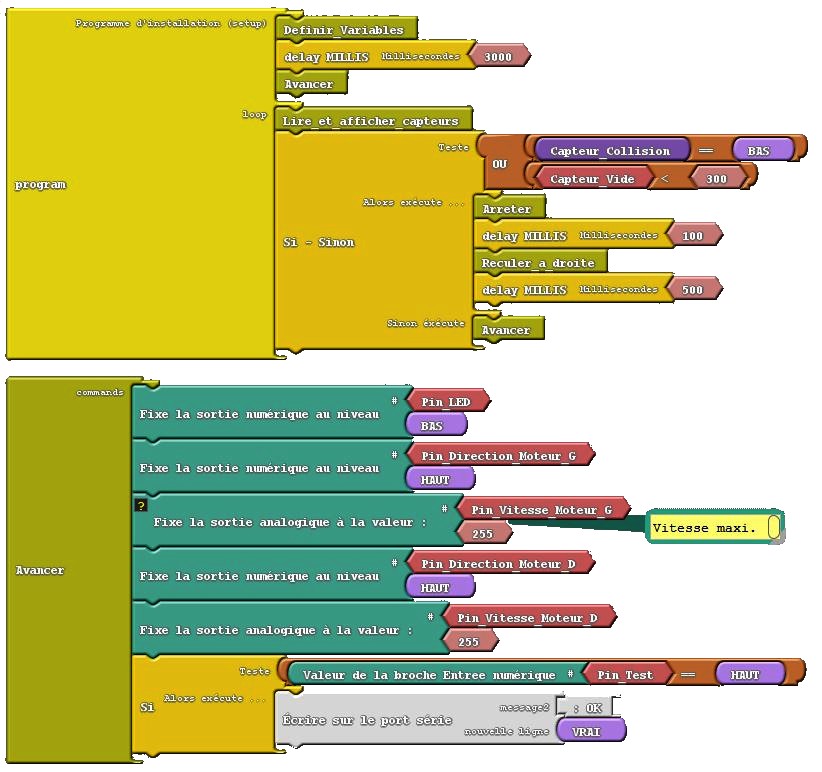
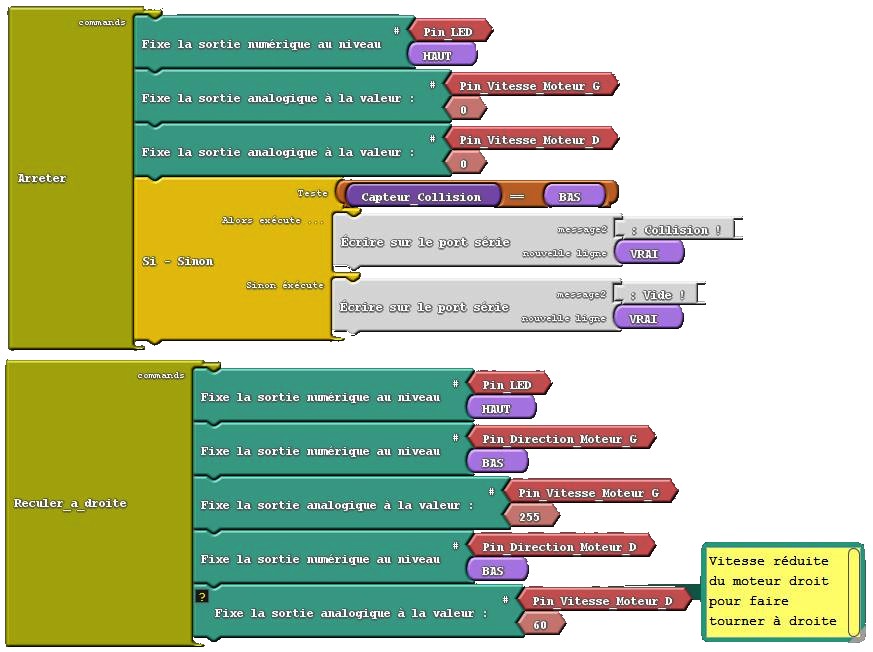
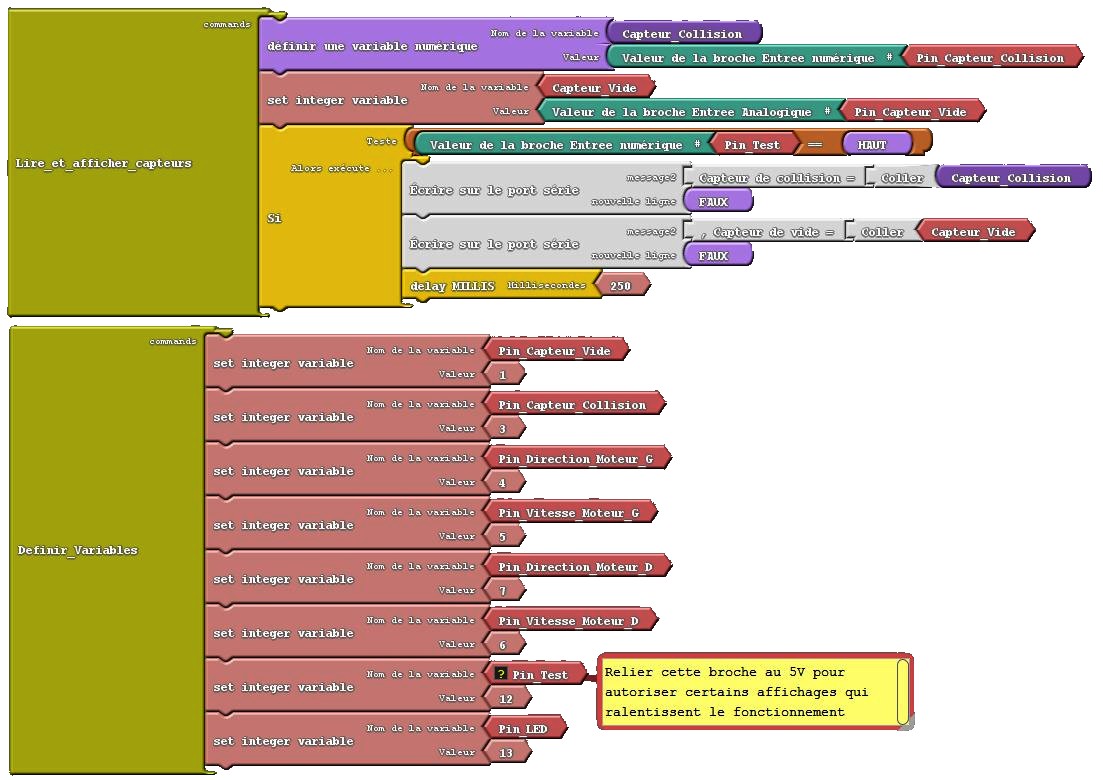
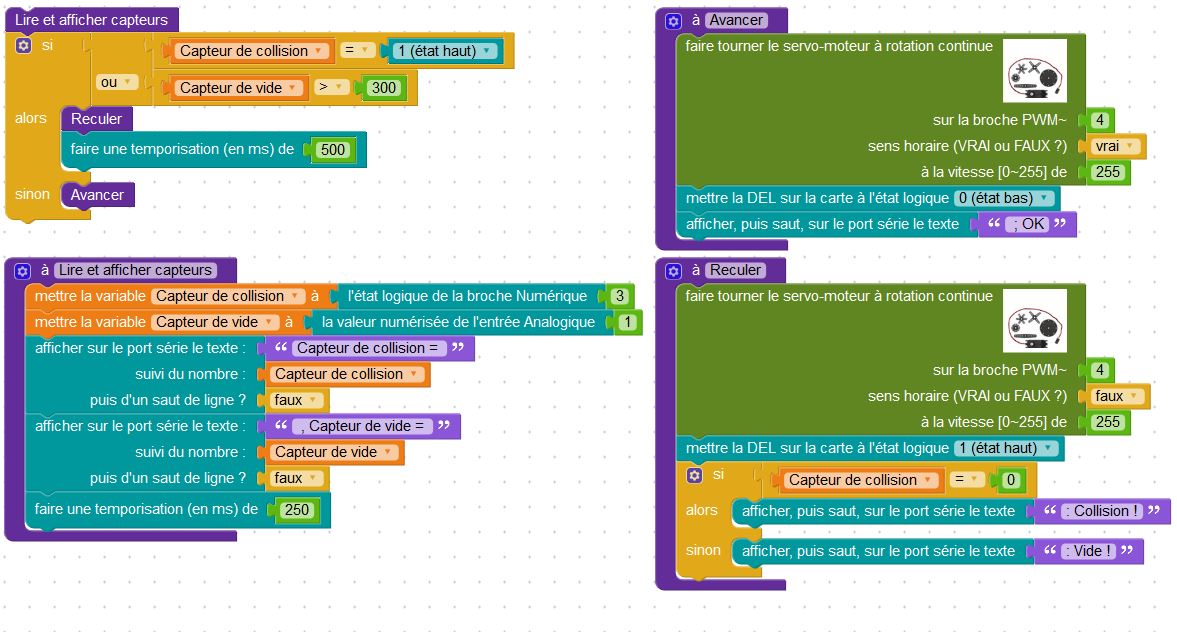
Je propose alors l’utilisation de ce programme (n° 6, pages 1 à 3) :
Autres documents pédagogiques
Evaluations Formatives et Sommatives :
4e Eval Formative 10 Aspirateur robot corr 100415
4e Eval Formative 11 Prog LEDS robot 240415 corr
4e Eval Formative 12 Prog robot partie 2 du 150515 corr
4e Eval Sommative 5 du 260515 corr
Si vous souhaitez les fichiers en version .doc ou des compléments d’informations, veuillez laisser un commentaire avec votre adresse mail (que je ne publierai pas) pour que je puisse vous contacter.


{kind=link}