
Du 24 au 28 août, une douzaine d’élèves (de la 6e à la 3e) ont travaillé à la conception et à la fabrication de petits robots avec l’aide d’un professeur de Technologie (M Pers), à raison de 2h30 par jour environ. Ils se sont répartis en 3 équipes. Chacune a défini ce que devrait faire son robot. M Pers a ensuite montré le matériel disponible et chaque équipe a choisi des composants : une base roulante motorisée, une carte électronique programmable, des capteurs, … Le début de l’assemblage a été assez rapide. Un premier programme de test a été fourni pour permettre les premiers tests dès le deuxième jour. La personnalisation du matériel et du programme s’est poursuivie les jours suivants avec notamment des fichiers audio différents pour chaque équipe (à partir de ressources sur Internet ou à partir d’enregistrements faits par les élèves avec un micro et le le logiciel Audacity). Les élèves ont ensuite dessiné des pièces en plastiques pour habiller leurs robots. La découpe et l’assemblage de ces pièces n’ont pas encore été terminés. Il a manqué du temps également pour terminer la personnalisation des programmes par rapport aux souhaits des élèves. Cela a donné envie aux élèves présents d’apprendre la programmation. Cela fera partie des objectifs en classe de Technologie, en 4e notamment. Quasiment tous les élèves présents, de la 6e à la 3e, ont exprimé le souhait de pouvoir apprendre la programmation. N’hésitez pas à laisser un commentaire si cela vous intéresse.
Deux des robots fabriqués utilisaient une base roulante motorisée à chenilles (Source : Collège Jean Macé)
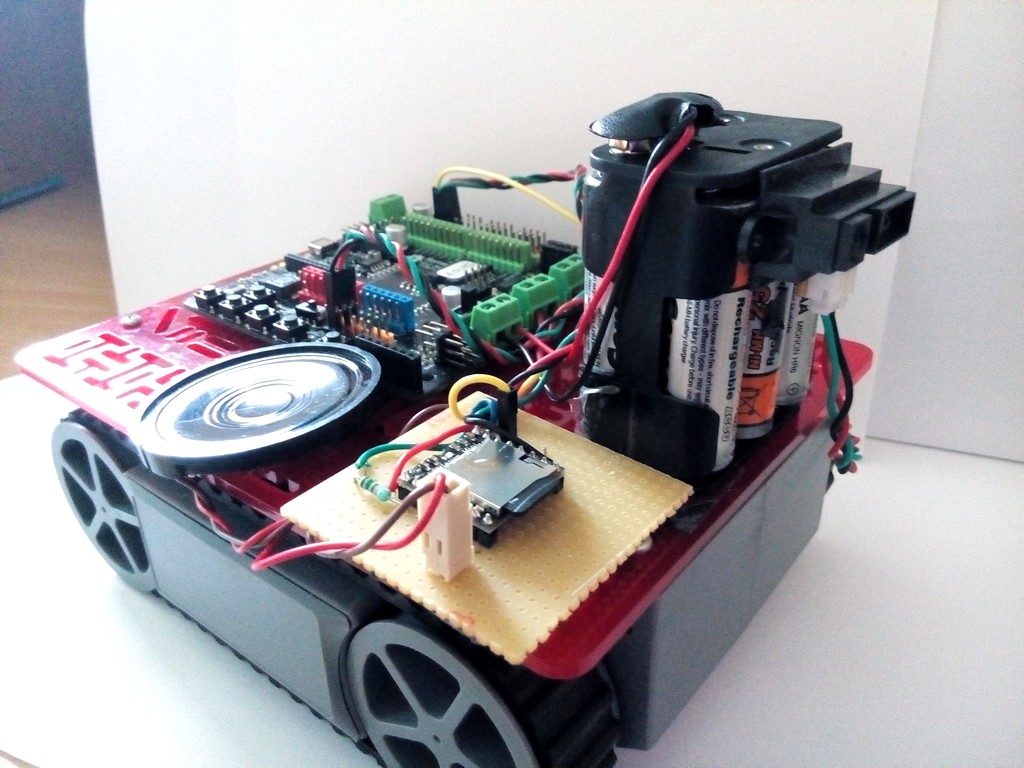
Composants visibles ici : carte électronique Programmable, batterie, module audio et haut-parleur (Source : Collège Jean Macé)
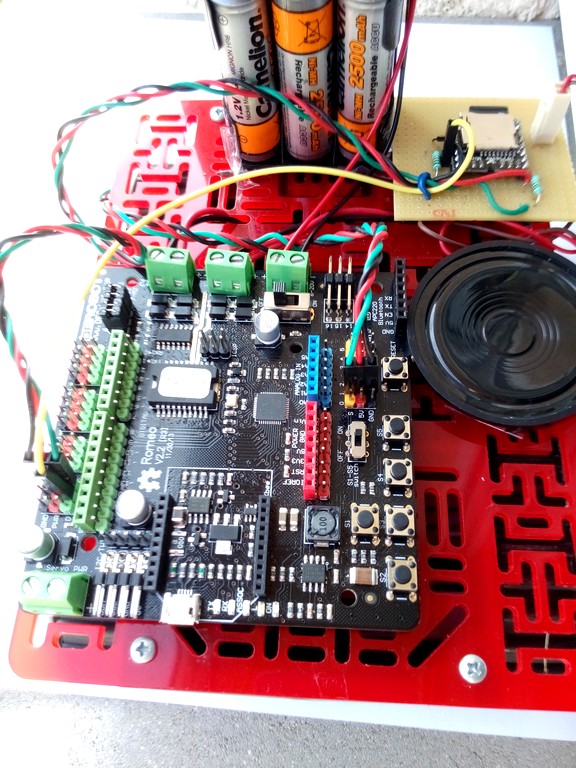
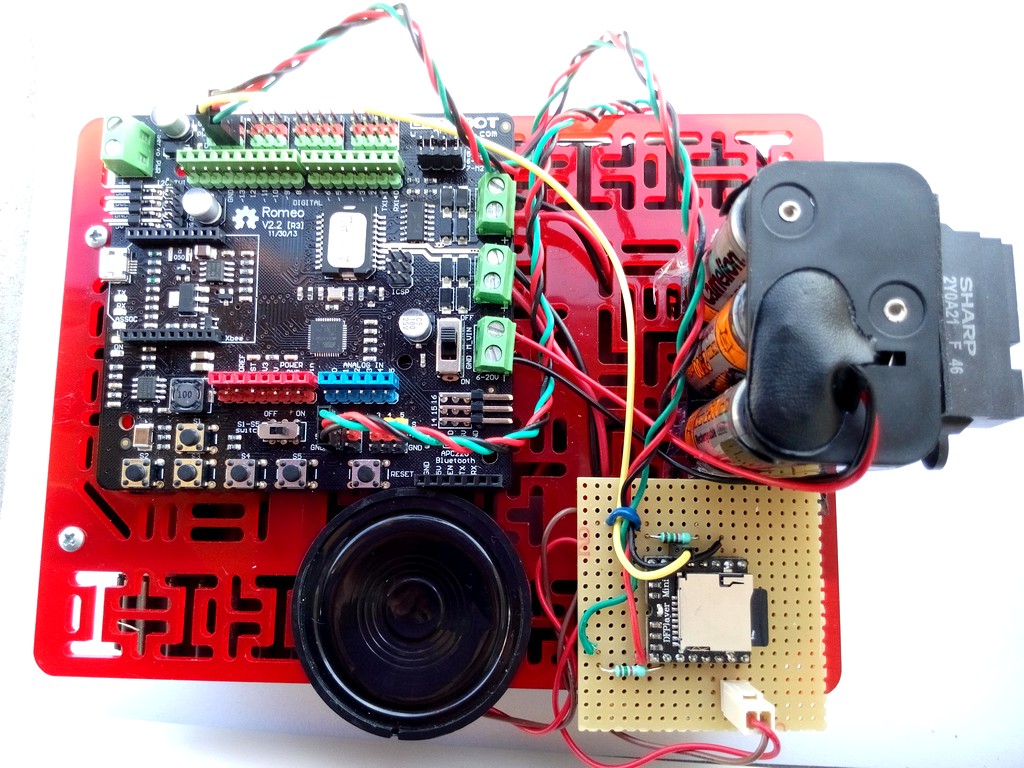
Carte électronique programmable Arduino (Source : Collège Jean Macé)
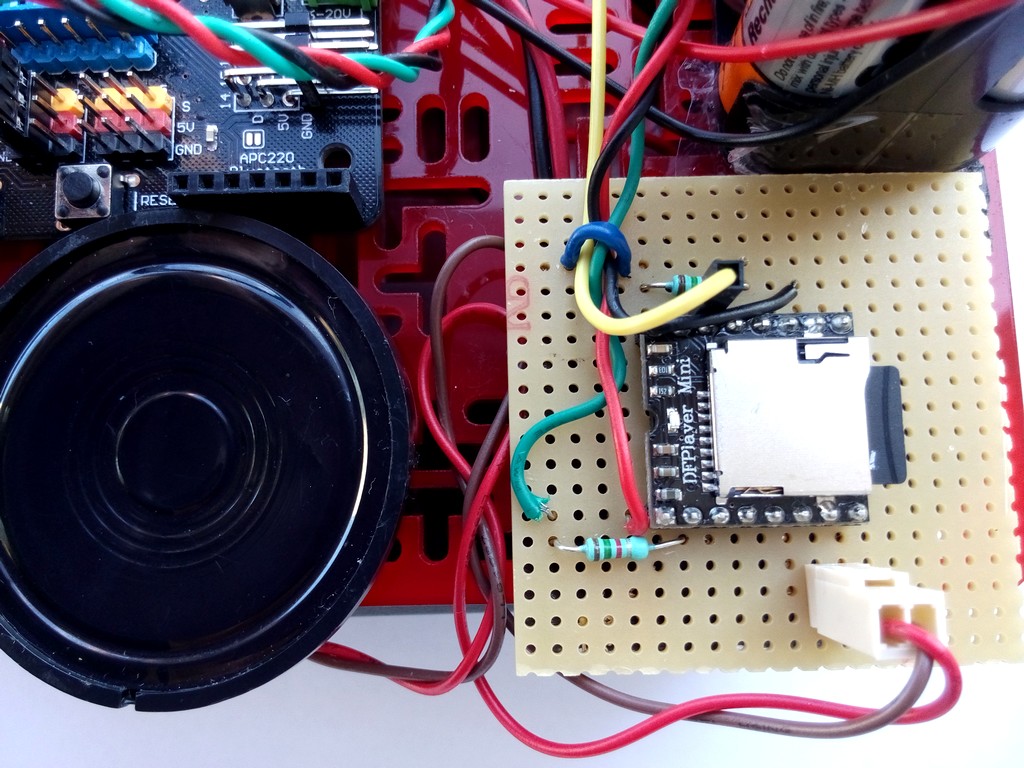
Module audio DFPlayer qui permet de commander avec la carte Arduino la lecture de fichiers audio mp3 stockés dans une carte micro SD. Un petit haut-parleur 50 Ohm est branché directement dessus (3 W maxi)
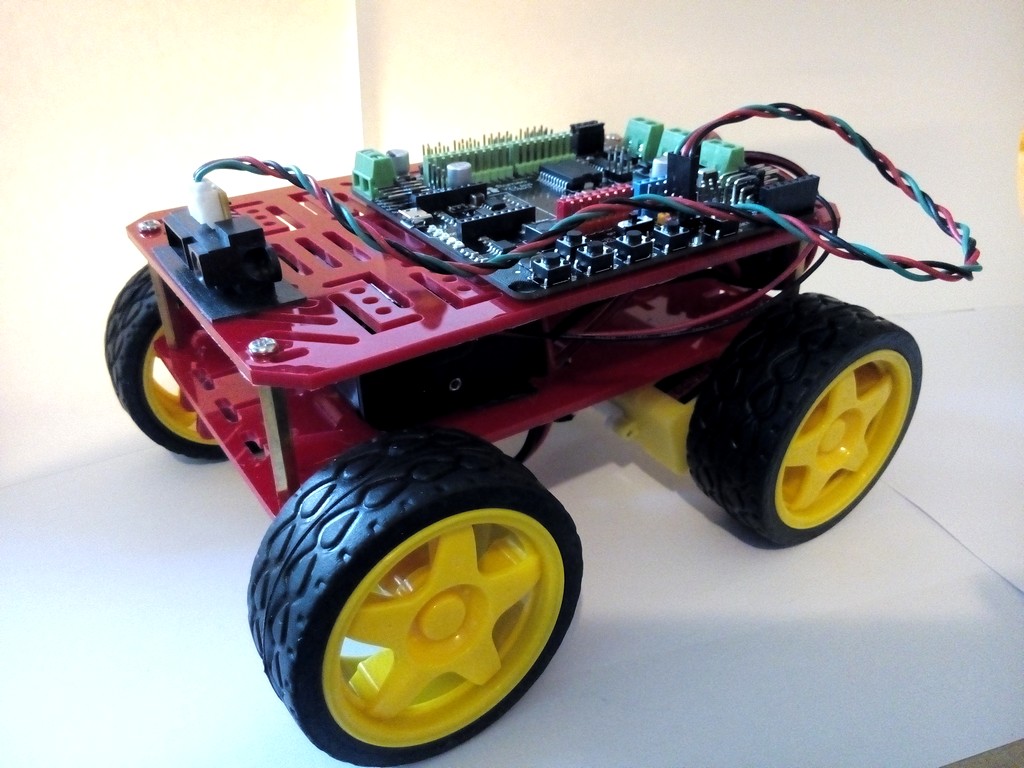
Un robot entièrement assemblé par les élèves à partir d’une base roulante motorisée DG008 en kit (4 roues motrices). (Source Collège Jean Macé)
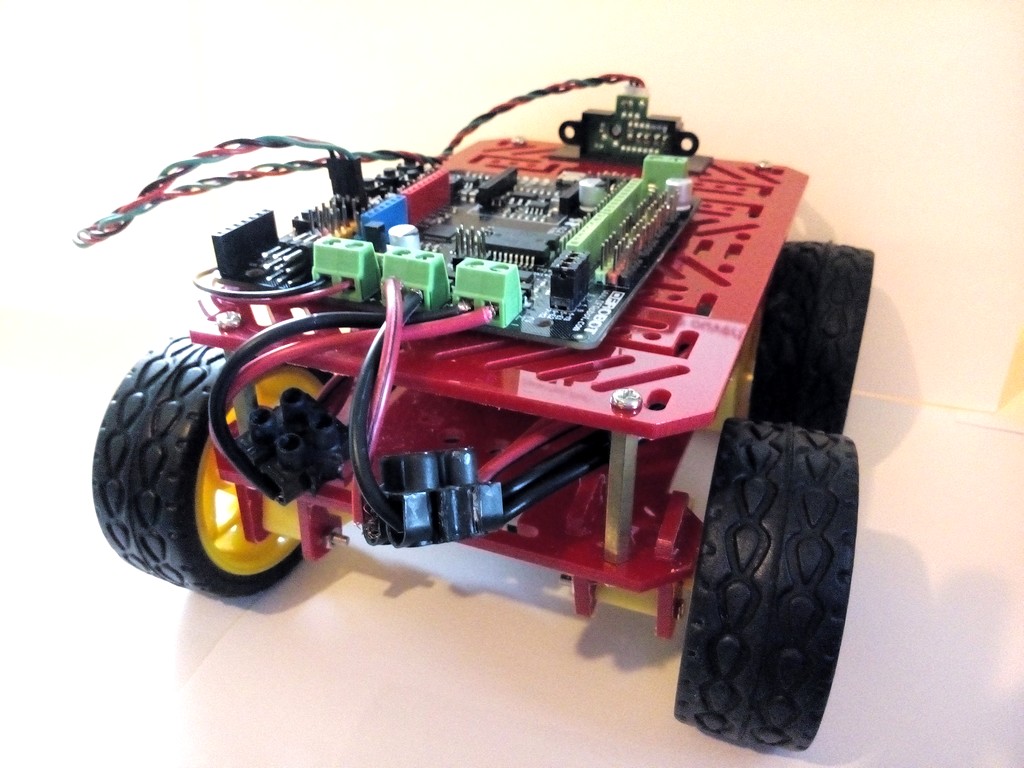
On voit le travail difficile de câblage réalisé sur ce robot par les élèves (Source : Collège Jean Macé)
Fichiers audio
Des fichiers audio utilisés par les élèves (et copiés sur la carte mémoire micro SD du module audio dont la lecture est commandée par la carte électronique programmable).
– 0001 Démarrage. Fichier audio trouvé sur le site universal-soundbank.com (comme les 5 fichiers suivants)
– 0002 Accident
– 0003 Je suis désolée
– 0004 Vous commencez a me fatiguer
– 0005 Vous pouvez être fier de vous
– 0006 Vous pouvez faire beaucoup mieux que ca
– 0007 Je t’aime pas tu sens mauvais (obtenu par des élèves à partir du site voxygen.fr , avec la voix de Sidoo)
– 0008 Boissons a volonté (enregistré par des élèves avec un micro et Audacity)
– Des bruits de robots trouvés sur Internet par un élève (Source à préciser)
Le témoignage de Nathan T. qui rentre en 6e
“A l’école ouverte, la semaine du mois d’Aout, nous avons fabriqué et programmé nos propres robots avec pour professeur Mr Pers. Nous avons tout d’abord imaginé des robots pour ensuite savoir comment nous allions les faire : les dimensions, le matériel etc … puis nous avons fabriqué les supports des robots. Lorsque nous avions terminé les supports, nous sommes passés au câblage puis l’habillage.”
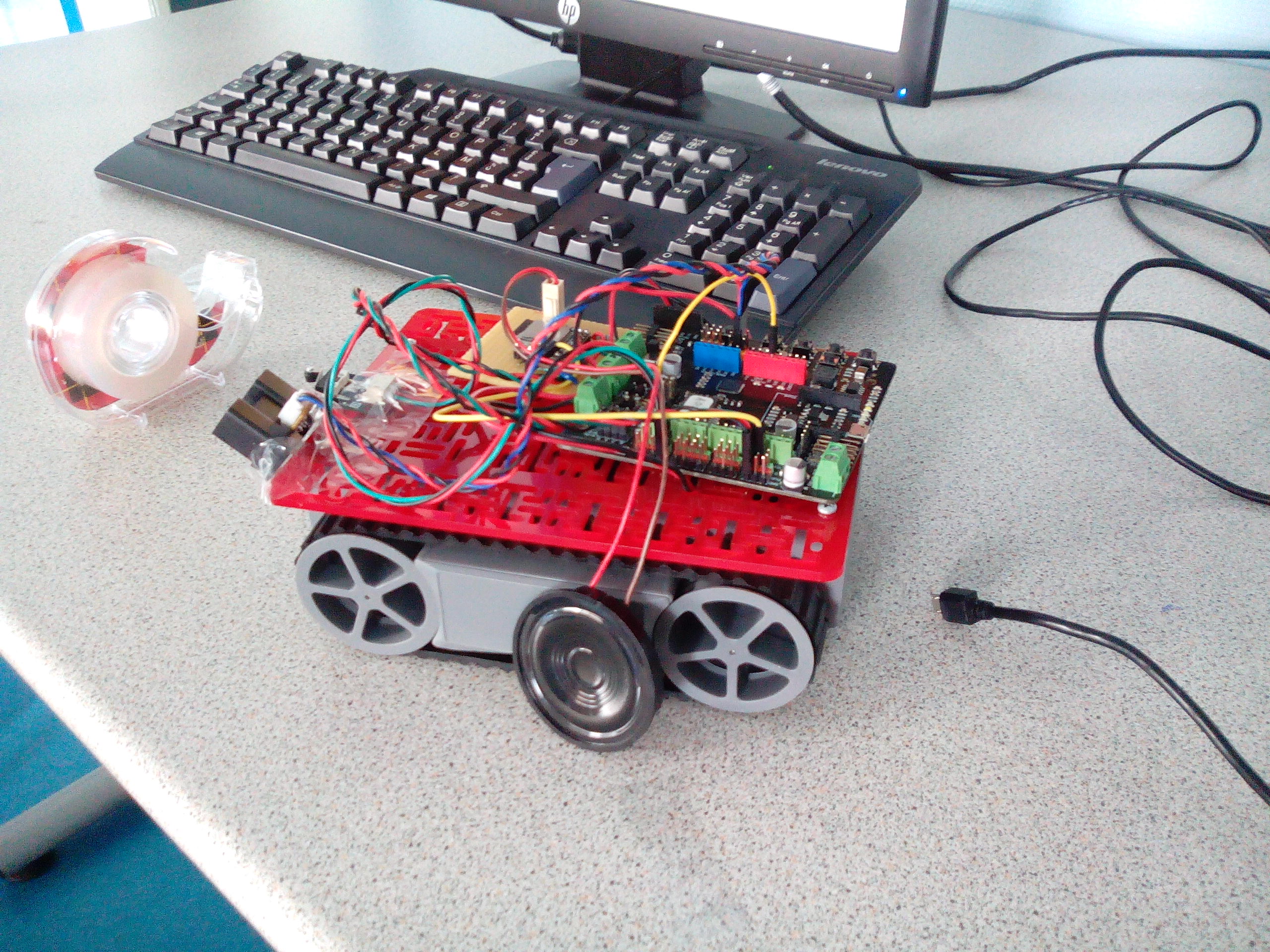
Programmation du robot avec un ordinateur (et câble micro USB débranché ici). Test d’un capteur optique infra rouge (de biais sur la gauche) pour détecter des obstacles (Source : Collège Jean Macé)