

Boutons du robot aspirateur
1- Analyse du fonctionnement :
1.1. Lorsque le robot aspirateur était en mode S nous avons observé qu’il faisait des cercles, tournant sur lui-même, tout en déviant de peu sa trajectoire pour qu’il puisse se déplacer pour nettoyer dans toute la pièce. Dès qu’il rencontrait un obstacle, (grâce à ses capteurs) il déviait sa trajectoire.

Bouton allumé en mode “S”
1.2. Lorsque le robot aspirateur était en mode L nous avons observé que dès qu’il rencontrait un obstacle il ne changeait pas de direction mais le longeais. Il sert à nettoyer les coins.
2-Solutions techniques pour acquérir des informations :
2.1. La solution technique retenue pour que l’aspirateur robot puisse acquérir des commandes de l’utilisateur sont les boutons.
2.3. La solution technique retenue pour que l’aspirateur robot puisse détecter la proximité d’un mur à droite du robot sont ses capteurs qui sont équipés d’un rayon infrarouge.
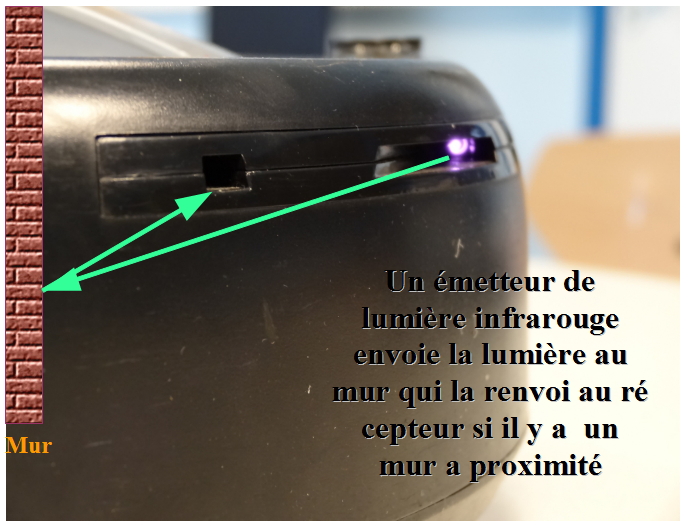
Les capteurs à lumière infrarouge
3-Solutions techniques permettant au robot de communiquer des informations à l’utilisateur sont la lumière et le son.
3.2. La solution technique retenue pour que l’aspirateur robot puisse communiquer à l’utilisateur une information sur la batterie est une LED qui devient rouge lorsque qu’il n’y a plus de batterie.
4. La solution technique permettant au robot de traiter toutes les informations est le processeur.
Alexis M. / Florian G. / Julie O. / Arthur P. / Lakmé B.