
Comment piloter précisément et efficacement les mouvements complexes d’un bras mécannique ?
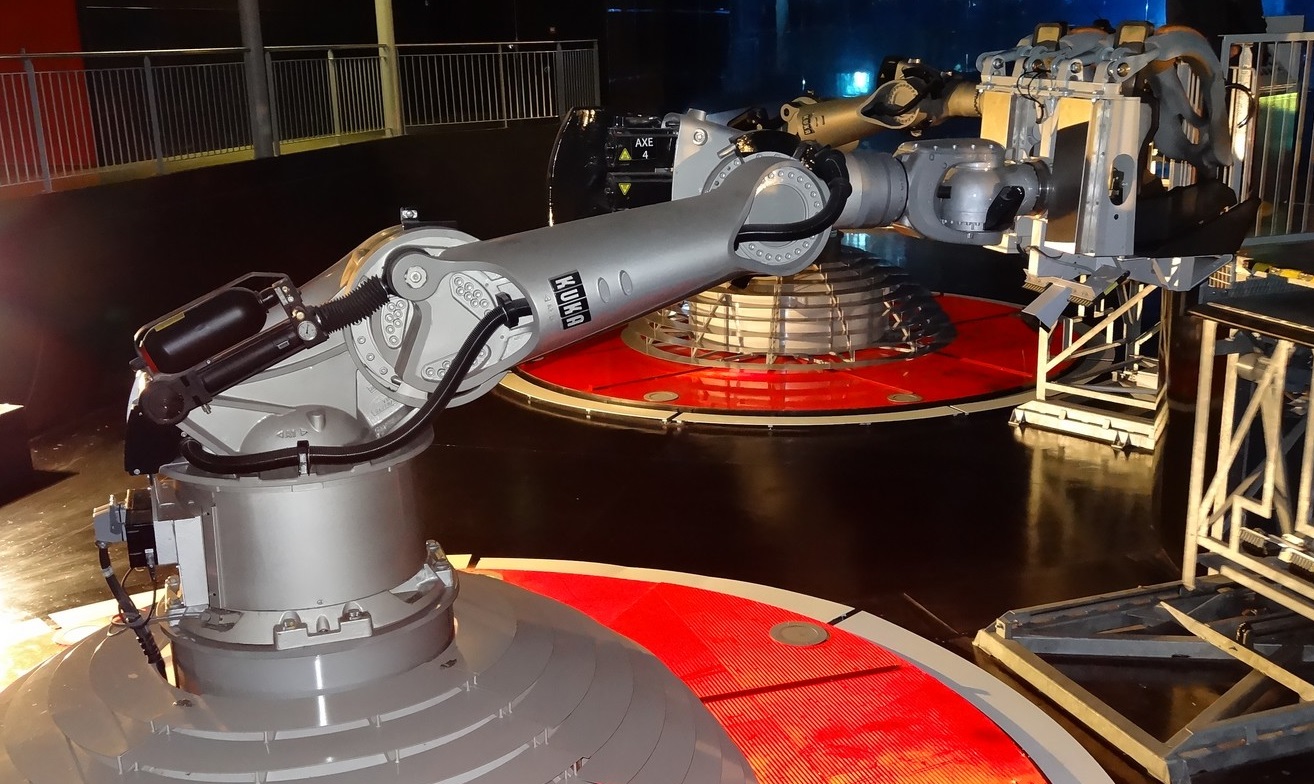
Robot Kuka KR500-3 (position étendu)
Analyse du besoin
Ce type de robot est destiné par exemple au Futuroscope qui propose l’attraction « Danse avec les robots ». Dans cette attraction, 10 robots sont mis en scène pour une chorégraphie choisie. Chaque robot a la capacité d’accueillir à bord 2 passagers. Nous avons étudié les différents aspects du robot permettant à la machine d’être piloter précisément et efficacement. Dans le cadre de cette étude, nous avons eu l’aide du parc du Futuroscope, nous permettant ainsi de visiter l’attraction “danse avec les robots”, équipé de robot Kuka KR500-3.
Analyse du système
Mouvements possibles des différents axes du système
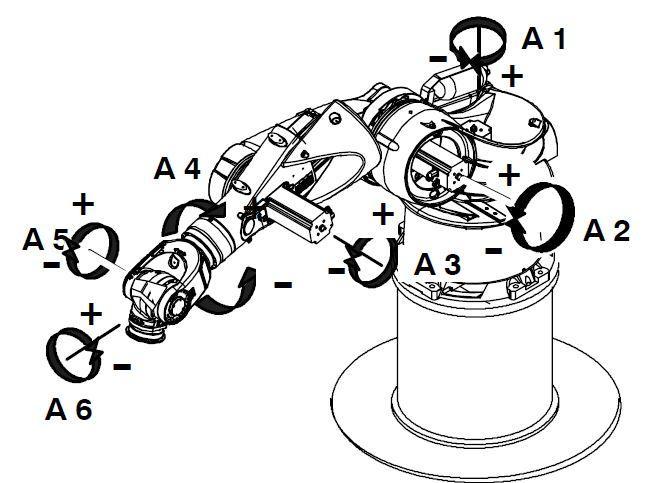
Description des différents axes (emplacement, type de mouvement)
| Axes | Emplacement | Type de mouvement |
| Axe 1 | Embase/Bâti de rotation |
Rotation pivot axe Z (+/-80°) |
| Axe 2 | Bâti de rotation/Epaule | rotation pivot axe Z(+20° à -130°) |
| Axe 3 | Épaule/Poignet en ligne |
rotation pivot axe Z (+144° à -100°) |
| Axe 4 | Poignet en ligne/Poignet en ligne | Rotation pivot axe Z (+/-350°) |
| Axe 5 | Poignet en ligne/Poignet en ligne | rotation pivot axe Z (+/-120°) |
| Axe 6 | Poignet en ligne/Poignet en ligne | Rotation pivot axe Z (+/-350°) |
Description générale du robot avec les principaux composants
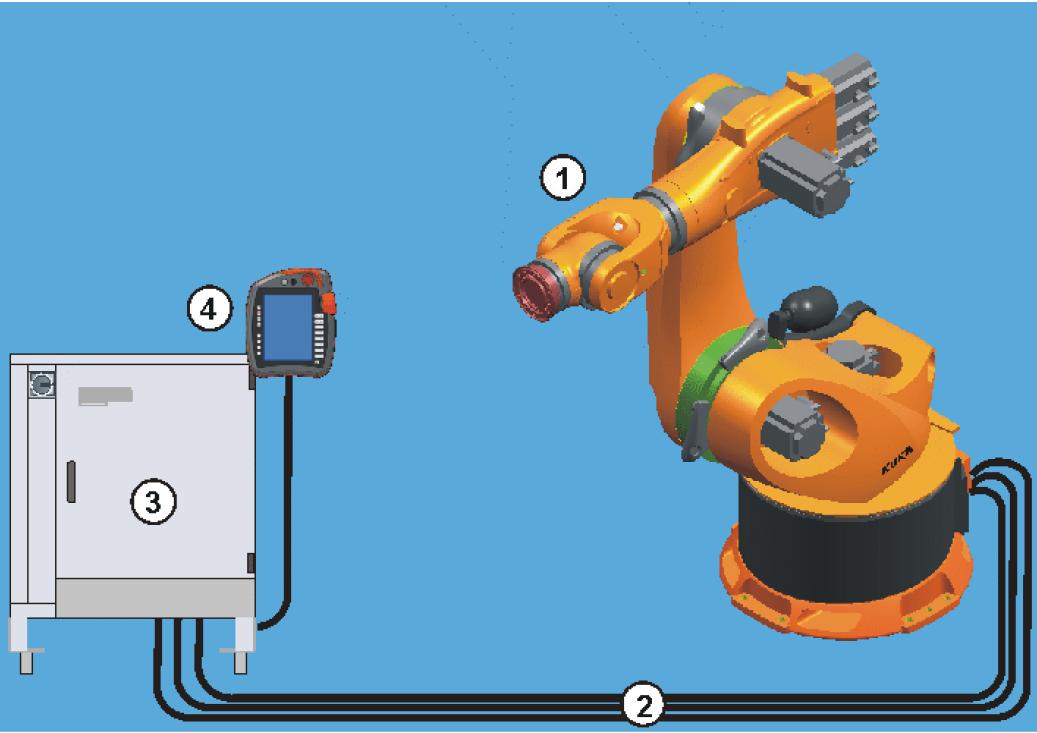
1. Robot 2.Câbles de liaison 3.Commande de robot 4.Boîtier de programmation portatif smart Pad
Caractéristiques du robot Kuka KR 500-3 :
Poids : 2 375 kg
Volume de travail : 68m3
Nombre d’axes : 6
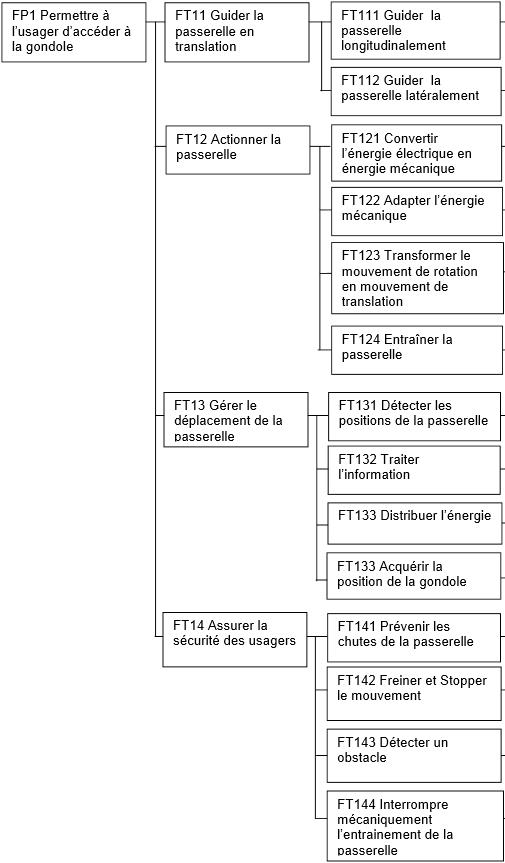
Diagramme FAST du robot
Description des différents composants permettant la précision du Robot
Pour être piloté précisément l’équipe d’ingénieur ayant conçu le robot a dû faire face à des contraintes techniques qui sont les suivantes :
- La gravité
- L’inertie
- La masse
- Les contraintes mécaniques
- Et la position exacte de chaque axe
Le robot est équipé de moteurs triphasés (Fig.1 et 2)permettant ainsi un couple et une puissance plus élevé. Par conséquent une puissance plus élevé permet des accélérations plus rapides (contrairement à un moteur à courant continu ne pouvant accepter une telle puissance).

Moteurs triphasées de l’axe 2 et 3 (Fig.1)
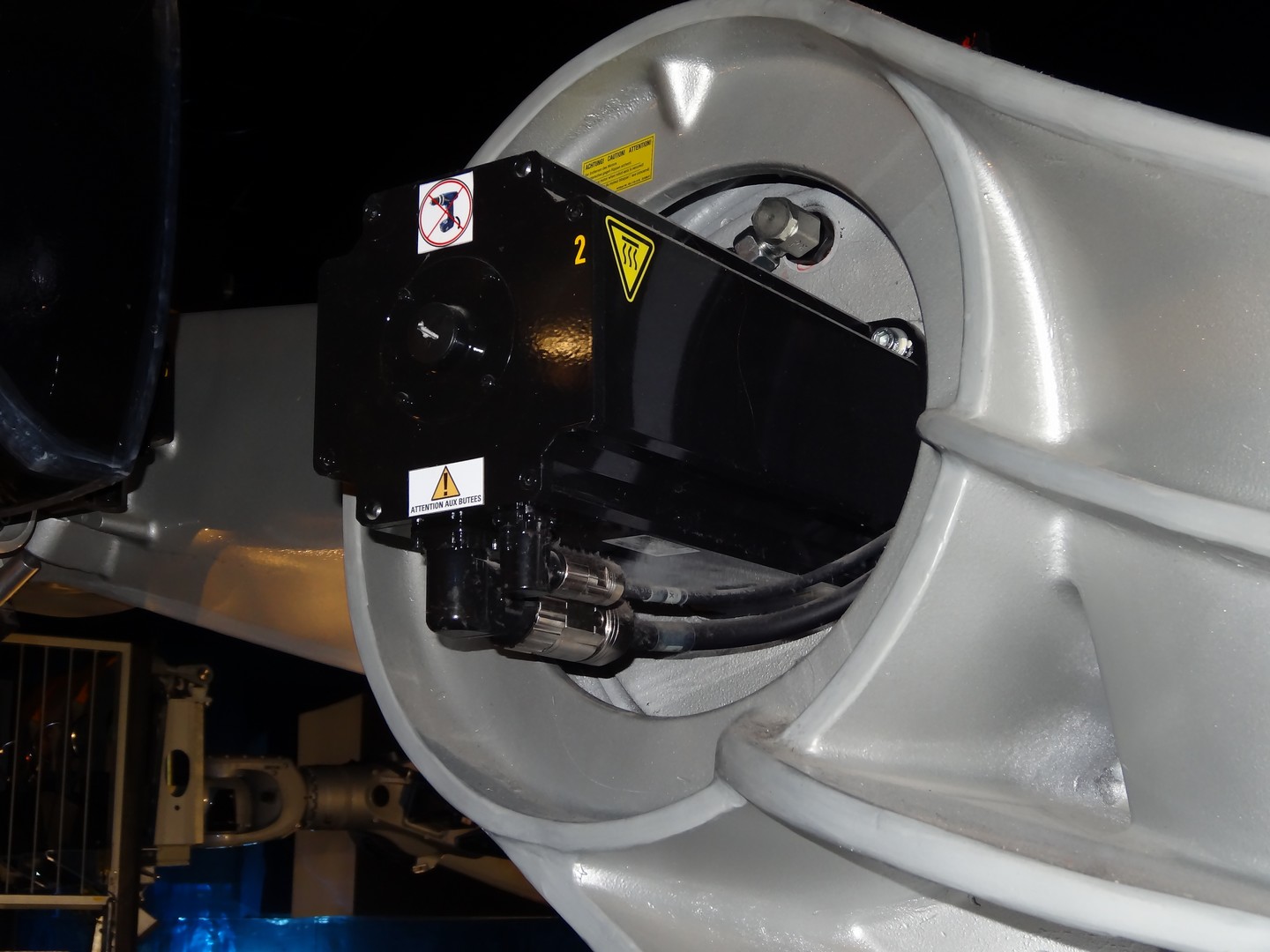
Moteur triphasé de l’axe 2 (Fig.2)
Mais cette force exerce une contrainte mécanique plus importante notamment sur la liaison entre le bâti de rotation et l’épaule (Fig.3).
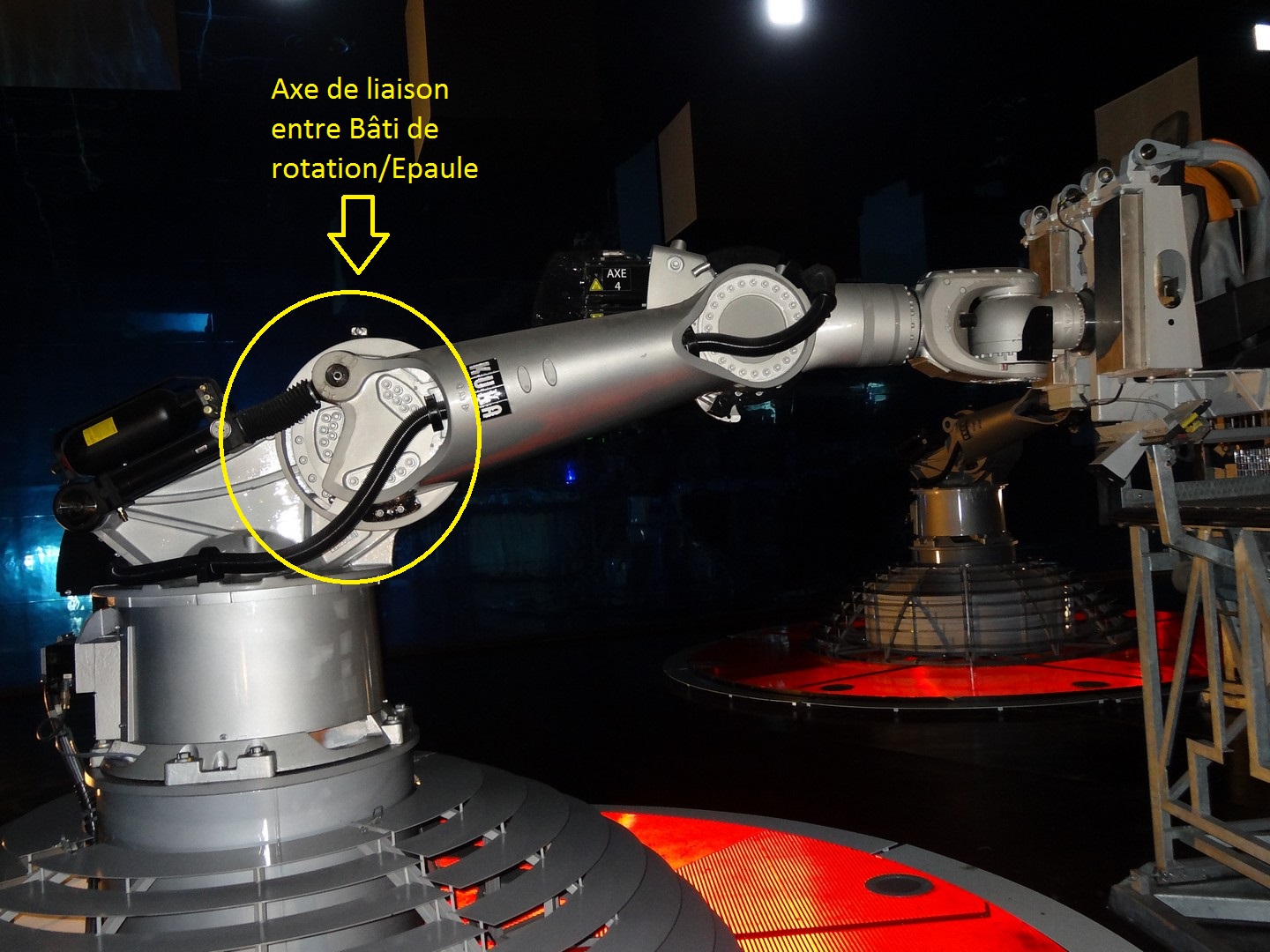
axe 2 (Bâti de rotation/Epaule) (Fig.3)
Pour pallier cette force, parfois violente, un compresseur hydraulique(Fig.4), fixé sur le bâti de rotation permet d’absorber celui-ci.
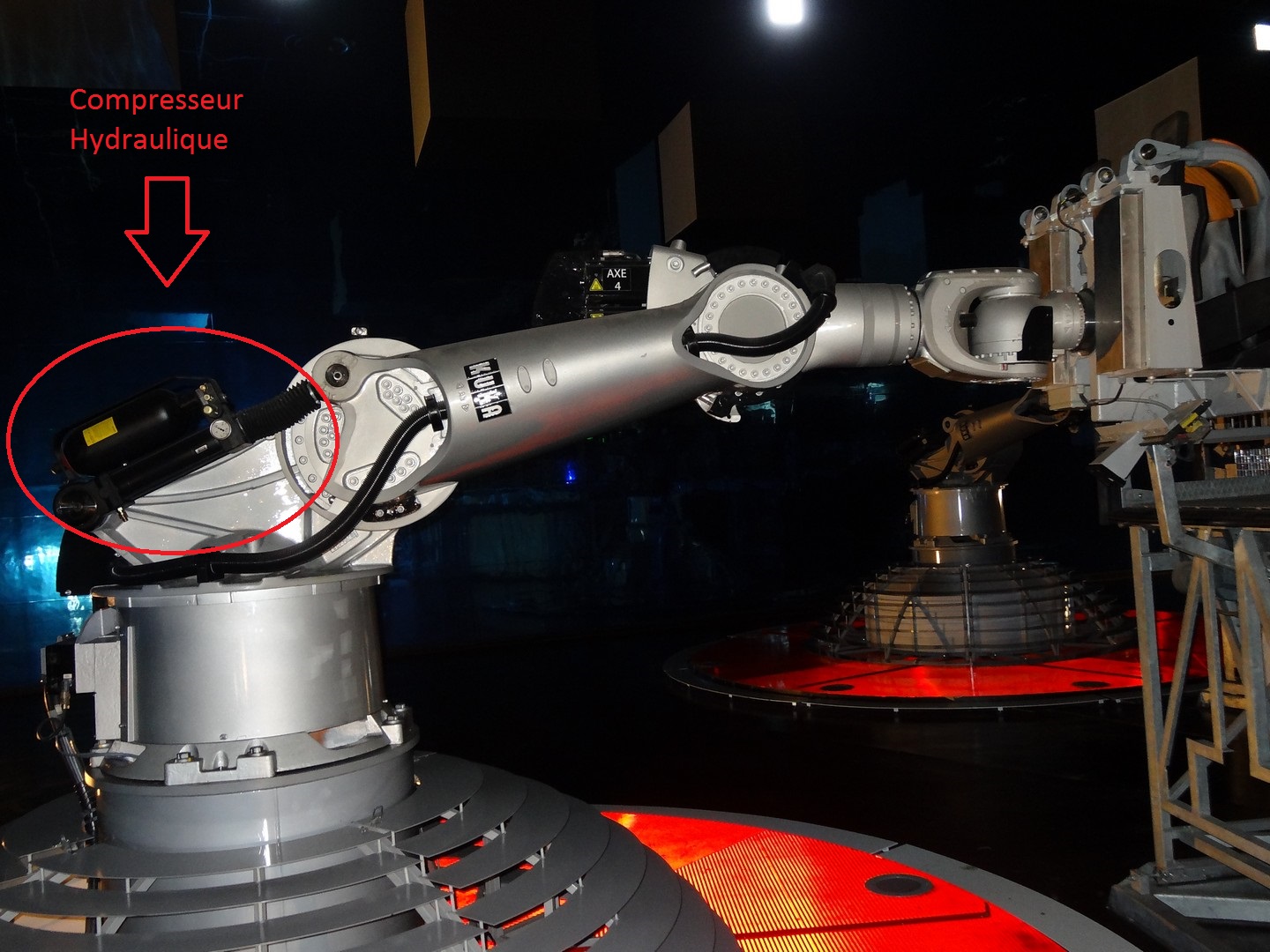
Compresseur Hydralique de l’axe 2 (Bâti de rotation/Epaule) (Fig.4)
Par la suite cette force étant emmagasinée dans le compresseur, elle va être libérée et ainsi générer une force supplémentaire pour un mouvement dans le sens inverse. D’autre part la puissance des moteurs et du compresseur ont permis de lutter contre certains phénomènes physiques comme par exemple la masse du robot, la gravité, et l’inertie du robot.
Mais toute cette puissance ne permet pas à elle seule d’avoir une précision des mouvements du robot. Un autre point essentiel est le contrôle du robot. Chaque moteur est donc équipé d’un capteur de position angulaire permettant au Boîtier de Programmation Portatif(Fig.5) de savoir précisément la position exacte de chaque axe, si oui ou non le robot est à la bonne position.

SmartPAD (Boitier de programmation portatif) (Fig.5)
Dans le cas contraire la position sera rectifiée immédiatement.
Conclusion :
Le robot est donc piloté précisément grâce aux capteurs de position angulaire de chacun des 6 axes, permettant ainsi au boitier de programmation portatif de connaitre la position de chaque axe à tout moment. Les mouvements du robots sont, quand à eux effectuer avec précision par les 6 moteurs triphasées.
Quentin D. Mathieu B. Mickaël P.