Problématique: Pour le bâtiment ou la construction choisi par votre équipe :
– Quelles sont les solutions innovantes retenues par le constructeur pour obtenir les performances souhaitées ?
– Ces solutions vous paraissent-elles correspondre à un bon compromis en terme de développement durable ?
Notre équipe étudie le Centre nautique de Bayonne, construit en 2010 et dont la caractéristique est d’être Haute Qualité Environnementale (HQE) (source:http://architopik.lemoniteur.fr/index.php/realisation-architecture/centre_aquatique_des_hauts_de_bayonne/4629)
(source:http://architopik.lemoniteur.fr/index.php/realisation-architecture/centre_aquatique_des_hauts_de_bayonne/4629)
Dans le cadre du plan de rénovation et de redynamisation urbaine lancé par la Ville de Bayonne, un nouveau centre aquatique a été implanté dans le quartier des Hauts de-Bayonne, prenant en compte les critères et exigences du développement durable et de l’éco-conception.
La municipalité́ a souhaité que cette construction soit labellisée Haute Qualité́ Environnementale (HQE). Ainsi, afin de respecter les contraintes du développement durable, le site propose:
- une « parfaite » intégration du bâtiment dans le paysage ;

une « parfaite » intégration du bâtiment dans le paysage
(http://architopik.lemoniteur.fr/medias/programme/projet/format/resize/4601/format4/projet_4629/h300coupe_540_360.jpg)
- une utilisation de matériaux sains et recyclables ;
- une toiture végétale favorisant la gestion des eaux pluviales et participe à l’intégration du bâtiment dans le paysage ;

une toiture végétale favorisant la gestion des eaux pluviales
- une exploitation maximale des éclairages naturels ;

une exploitation maximale des éclairages naturels
- un bassins en inox permettant de limiter le traitement physico-chimique de l’eau car sa surface lisse empêche la fixation d’algues ou de champignons et facilite l’entretient, de monter plus rapidement en température et d’assurer une plus grande durée de vie des structures (de 20 à 40 ans). C’est de plus un matériau recyclable, léger et souple (résiste aux déformations dues aux mouvements de terrains ou aux légers choc par exemple). Mais cela reste tout de même un produit “de luxe”.
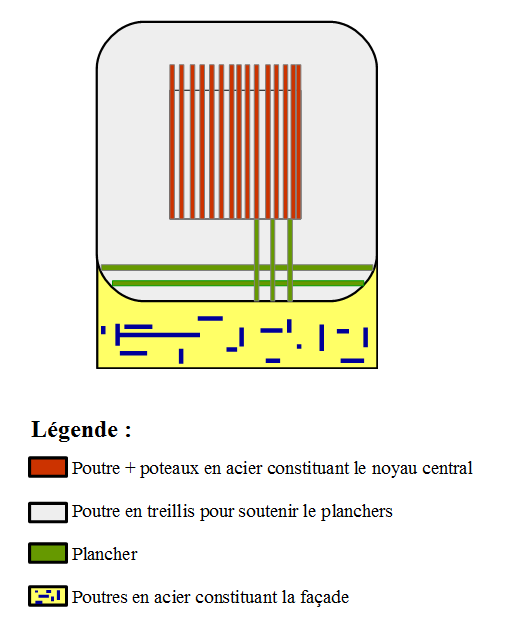
- Elle est constituée d’une charpente en bois lamellé collé, de poteaux ronds en bois et d’éléments verticaux en béton armé.
- —-> Pourquoi le lamellé collé?
- Comme son nom l’indique, ce matériaux est composé de lamelles de bois collées, permettant ainsi de faire de grandes pièces de bois que l’on ne pourrait pas obtenir avec un arbre, de faire des formes complexes et comme il est très homogène, il possède de bonnes propriétés techniques. Cependant, c’est un matériaux qui reste cher. Cliquer ici pour plus d’information.
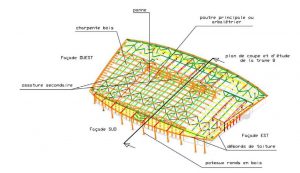
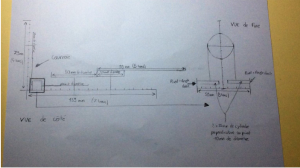
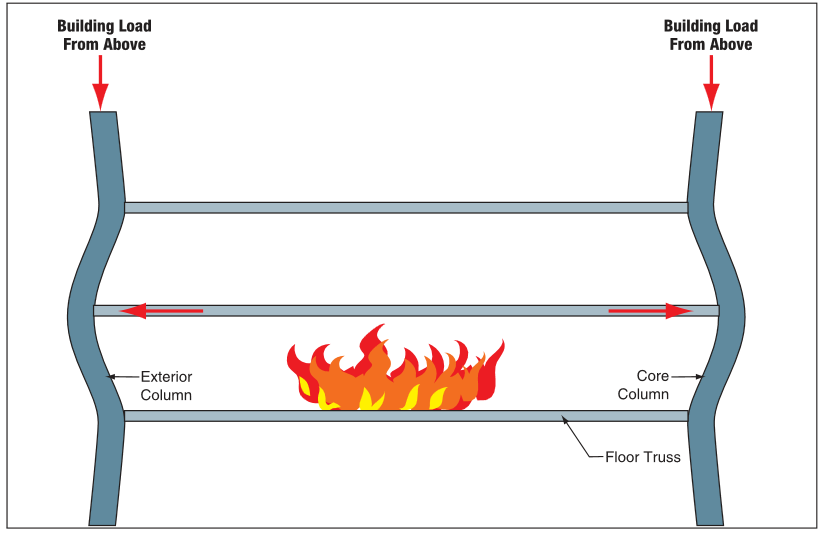
Schéma Structure porteuse Source: document Bac STI2D 2012
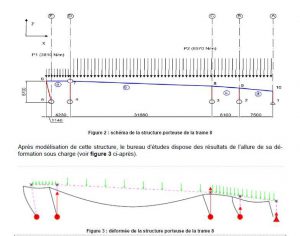
déformation maximale de l’arbalétrier
La flèche, ici notée Umax, située à 15,85 m du nœud 4, est égale à:
Umax = 1.62*10-2* ((P2*L)/(E*I))
où E: module de Young du matériau constitutif de la poutre, en MPa
Bois Lamellé collé : E = 10 000 MPa
I : inertie de la section de la poutre, en m4 et I = (b*h3)/12 où b et h sont la largeur et la hauteur de la poutre
P2: charge appliquée dans la poutre, en N/m
L: portée de la poutre, en m
Umax: flèche maximale de la poutre, en m
Les règlements de la construction imposent une valeur limite à cette flèche :
- cas du bois lamellé collé : Umax ≤ L/250
On calcul le moment quadratique du lamellé collé:
Donc ici Umax =1.62*10-2* ((8570*10-6*31.664)/(10000*I))
= 1.62*10-2* ((8570*10-6*31.664)/(10000* ((b*h3)/12))
On calcul pour la poutre L*C 230*2000
donc Umax = 1.62*10-2* ((8570*10-6*31.664)/(10000* ((0.230*23)/12)) = 4 408 333m
- La démarche de cette construction labellisée HQE
La démarche HQE vise à améliorer la qualité environnementale des bâtiments neufs et existants , c’est à dire à offrir des ouvrages sains et confortables dont les impacts sur l’environnement , évalué sur l’ensemble du cycle de vie ,sont les plus maitrisés possibles .C’est une démarche d’optimisation multcritère qui s’appuie sur une donnée fondamental :un bâtiment doit avant tout répondre à un usage et assurer un cadre de vie adéquat à ses utilisateurs .
Pour obtenir cette labellisation HQE, la construction doit être la réalisation de :
- le respect d’une démarche d’éco-construction ;
- l’optimisation de la gestion et de la maintenance technique des installations ;
- le confort visuel.
Cibles éco-construction
« L’espace de 1 480m2 ouvre sur le jardin et offre une vue sur la ligne des Pyrénées Sur le solarium extérieur, les baigneurs sont à l’abri des regards depuis la chaussée.».
Pour des bâtiments avec leur environnements , Il y a une parfaite intégration paysagère dans cette nouvelle construction. Ce centre aquatique est adossé aux courbes du terrain en une forme de coque . L’originalité réside dans le choix des matériaux, dont le grand bassin réalisé en inox, et le confort acoustique assuré par un mélange de panneaux en bois au plafond et de cellules végétalisées, tels des jardins suspendus, dans la paroi entre le bassin et les vestiaires.
Le versant environnement du centre aquatique est aussi dans ce qui ne se voit pas : la récupération des eaux pluviales, la production de 50 % de l’eau chaude sani- taire grâce à 70 m2 de panneaux solaires thermiques, une pompe à chaleur réversible de 275 kilowatts, et l’utilisation de la chaleur de l’eau de débordement pour le chauffage.

cellule végétalisée dans les parois
cellule végétalisée dans les parois
Matériaux renovelables
Il y a trois matériaux recyclables utilisés dans la construction de la piscine, permettant de mettre en avant les 2 cibles d’éco-construction visées dans cet ouvrage .
| Matériaux : |
inox |
Bois (epicea, sapin des Vosges) |
Cellule végétalisée |
| Localisation |
Bassin |
charpente |
Paroi intérieure |
la gestion de l’entretien et de la maintenance
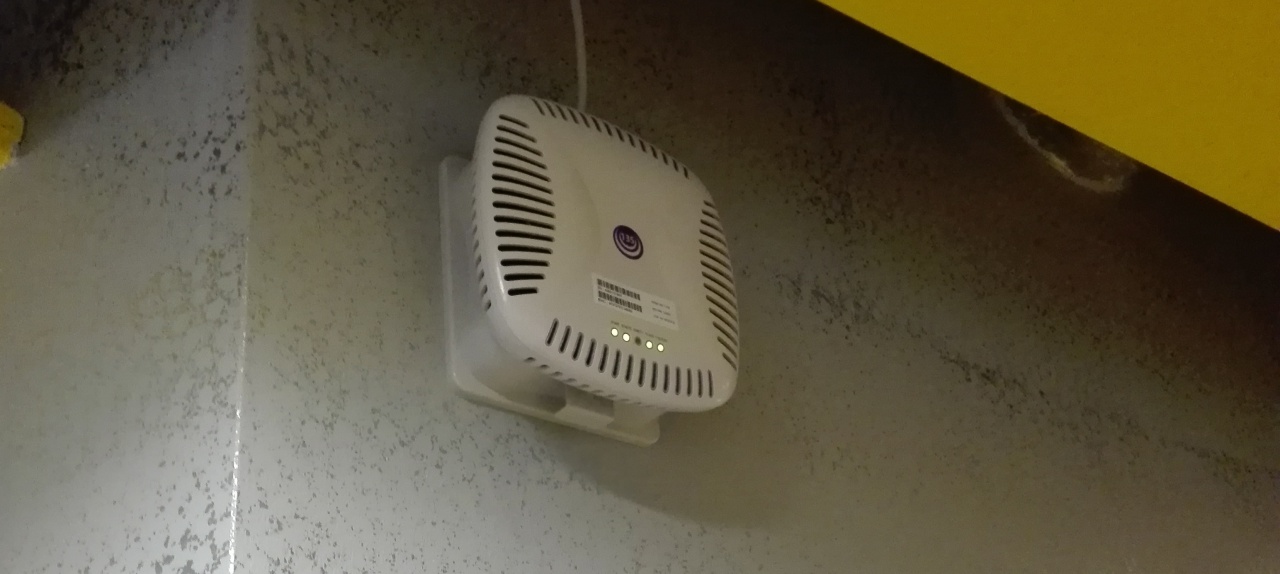
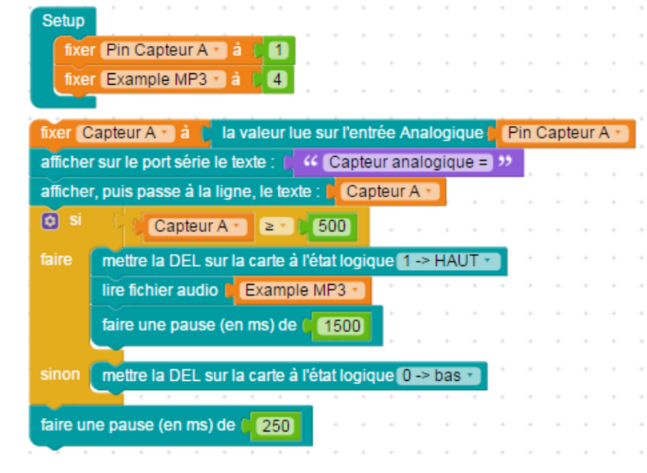
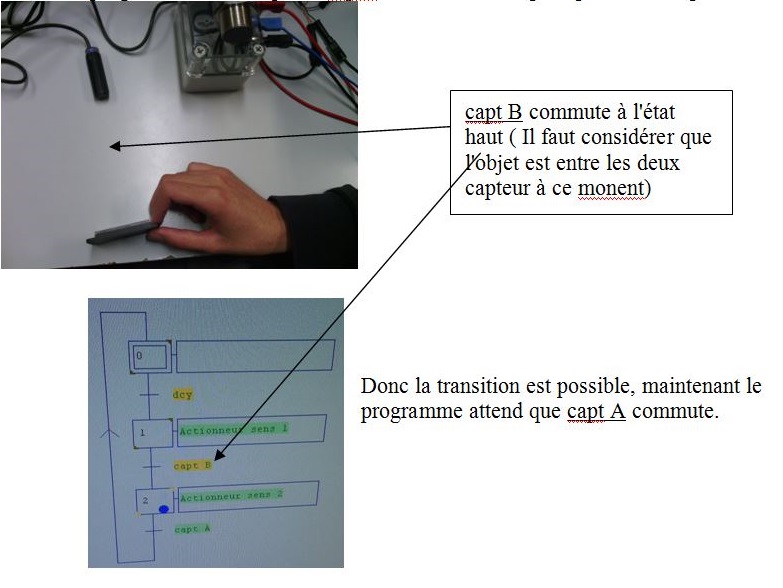
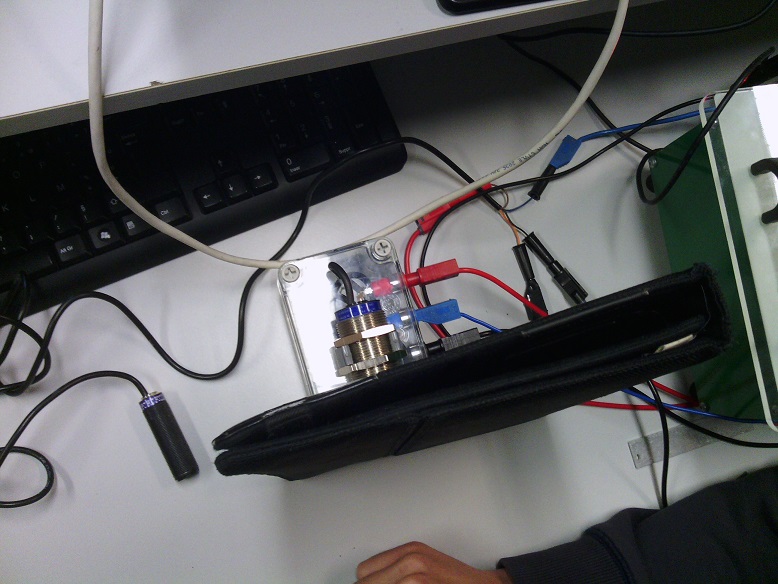
Cette piscine est dotée d’un réseau informatique et d’un accès à internet permettant une gestion à distance de tout le système technique.
Cet environnement informatique permet de :
- détecter et résoudre rapidement des problèmes de manière à répondre rapidement aux besoins de santé et de confort des usagers ;
- • limiter au maximum les déplacements des techniciens et ainsi participer à la diminution d’émission de CO2.
On utilise la technologie ADSL (Asymmetric Digital Subscriber Line) sur le réseau local pour relier WAN ( width Area Network). En plus le routeur modem ADSL a la fonction de passerelle, donc l’organisation physique du réseau offre bien la possibilité d’une gestion à distance depuis internet. LAN (Local Area Network) peuvent communiquer entre elles et avec le routeur parce que toutes les adresses sont de la forme 192.168.1.x/24. de plus si les machines disposent l’adresse de passerelle 192.168.1.1 alors elles peuvent communiquer avec internet et ainsi avec la gestion à distance.
le serveur GTB local récupère les différentes informations que les automates lui envoient toutes les minutes et le serveur local envoie les ordonées au serveur distant .

Structure du réseau informatique
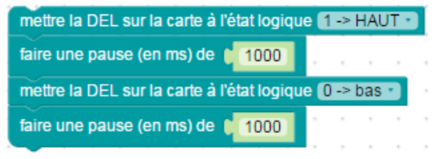
Dans ce bâtiment, il y a un bassin de nage que couvre une surface de 510 m², c’est un nage thermostaté avec la température entre 28 et 30°C. Normalement, après que quelqu’un nage, il y a des cheveux ou des déchet inutiles flottants dans l’eau. C’est le signe d’un défaut du système de traite des eaux. L’eau du bassin de nage est filtrée par un traitement chimique.
Pendant tout le circulation, y a 4 fonctionnement: filtrage, lavage, rinçage, vidange.
Filtrage:
L’eau du bassin de nage suit le cheminement suivant:
-recueillir par les goulottes positionnées sur la périphérie du bassin représente 70% du débit d’eau filtré
-collecter par des grilles de fond constitue le complément (30% du débit)
-première fois filtre dans un pré-filtre
-ajouter le floculant pour coaguler les impuretés
-deuxième fois filtre par 2 filtres à sable fonctionnant simulatnément
-chauffer
-réinjecter dans le bassin de nage
Dans le traitement de l’eau du bassin de nage, il y a deux pompes montées en parallèle pour réalisé la circulation. Chaque pompe assurent 50% du débit.
Lavage:
Le lavage des filtres à sable est obtenu par circulation inversée d’eau à travers le filre. Le lavage des filtres à sable a deux pompes pour accroître la vitesse de circulation de l’eau dans le filtre.
Quand la pression en amont des filtre dépasse la valeur fixée, la alarme technique est générée, c’est le signe que le filtre est encrassé et pour protéger le lavage des filtres.
Rinçage:
Avant de l’eau repasser, il vais évacue le résidus dans la bâche tampon des contre-lavanges.
Vidange:
Il vais en utilisant les pompes de recyclage à diriger l’eau vidangée vers la bâche tampon des contre-lavanges.
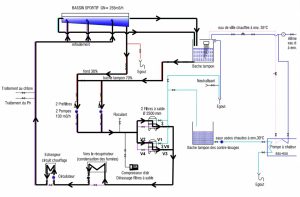
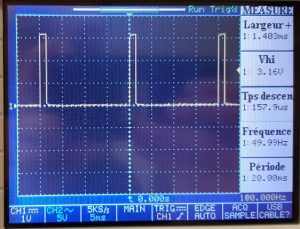
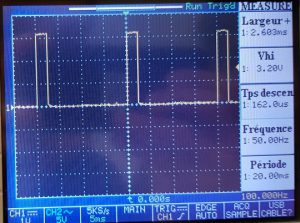
Phase de filtrage des eaux du bassin
Groupe 7: Solène Dumas-Grollier , Sijia Li, Minting Shen, Yixuan He
























{kind=link}
{kind=link}