Lien vers le tutoriel sur CoSpaces, sur lequel je suis en train de travailler :
https://drive.google.com/open?id=0B-rRjoDMbM0iRUZVak5YWjFvVHc
J’ai découvert début février 2017 un nouvel outil numérique très prometteur pour faire avec des élèves de 13 à 18 ans de la modélisation et de la simulation du comportement d’un système : CoSpaces.

Je travaille beaucoup depuis pour analyser le potentiel pédagogique de ce nouvel outil, échanger au niveau international avec des enseignants utilisateurs de CoSpaces, et échanger avec la société Delightex qui développe actuellement ce logiciel pédagogique.
CoSpaces est une application multi plate-forme, actuellement en version beta gratuite. La version éducation devrait être disponible à partir du mois de juin 2017 et sera payante. Je suis d’ores et déjà convaincu que cet outil pourrait satisfaire une grande partie de nos besoins pédagogiques en matière de simulation du comportement d’un système pour des élèves de 13 à 18 ans (au moins) en complément de nos outils actuels.

1) Logiciels de modélisation et de simulation utilisés actuellement
– Pour les fonctions mécaniques, c’est surtout SolidWorks qui est utilisé pour l’enseignement en France (pour des élèves de 11 à 18 ans). Ce logiciel permet de modéliser et simuler des mécanismes complexes : modélisation 3D (avec une qualité professionnelle), cinématique, résistance des matériaux, exportation pour l’impression 3D, …
OnShape (https://www.onshape.com) est une alternative intéressante car gratuite pour l’éducation et plus simple pour la cinématique.
Ces logiciels ne sont pas toujours très simples à utiliser au niveau collège.
BlocksCAD (https://www.blockscad3d.com/editor) permet de modéliser en 3D avec Blockly dès 10 ans : CoSpaces s’en inspire un peu (peut-être encore plus dans les prochaines versions).
– Pour modéliser le comportement de fonctions électroniques comme une carte Arduino associées à des capteurs et des interfaces diverses (interfaces de dialogues, interfaces de communication, interfaces de puissance), nous avons des logiciels basés sur Blockly, devenu le standard actuel, tels que mBlock, Blockly Arduino, … Ces logiciels sont gratuits mais ils ne permettent malheureusement pas la simulation du comportement d’un système (au mieux on peut voir l’évolution temporelle de l’exécution du programme et les entrées/sortie activées).
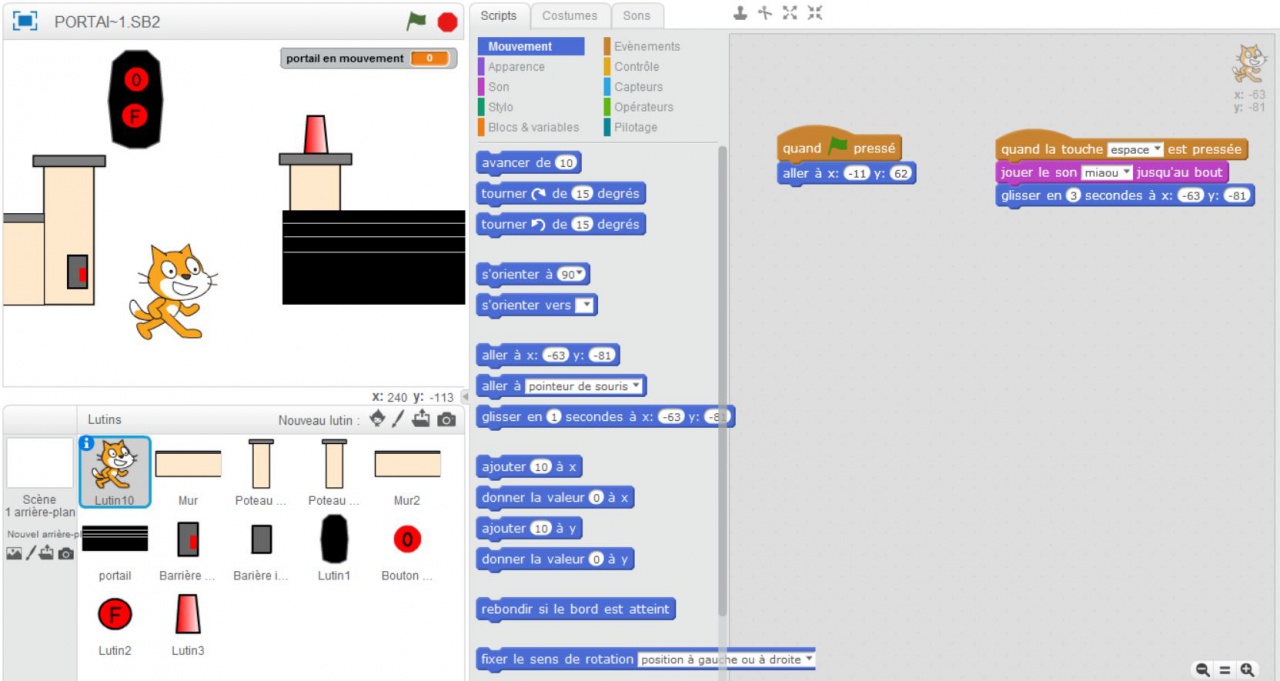
– Des logiciels comme Scratch, basé aussi sur Blockly, permettent de simuler le comportement d’un système simple. Cela a contribué au succès mondial de Scratch, devenu une référence, mais les possibilités restent très limitées en matière de simulation.
Exemples de simulation d’un portail ou d’un éclairage automatique (formation ac-limoges oct. 2016) : http://pedagogie.ac-limoges.fr/techno/spip.php?article241
Les objectifs correspondaient ici à la programmation, mais on pourrait envisager un travail plus orienté sur la modélisation et la simulation du comportement d’un système.
– Des logiciels comme SinusPhy, FlowCode, ou MatLab permettent de modéliser et simuler le comportement d’un système si on les associent à d’autres logiciels comme Méca 3D. La modélisation et la simulation avec ces outils sont assez complexes avec des approchent très spécifiques. Leur utilisation est difficile même pour des lycéens.
D’autres logiciels plus spécifiques existent comme Algodoo ou énergie 3D, mais ils sont souvent limités à des usages particuliers.
2) Modélisation et simulation d’un système avec CoSpaces
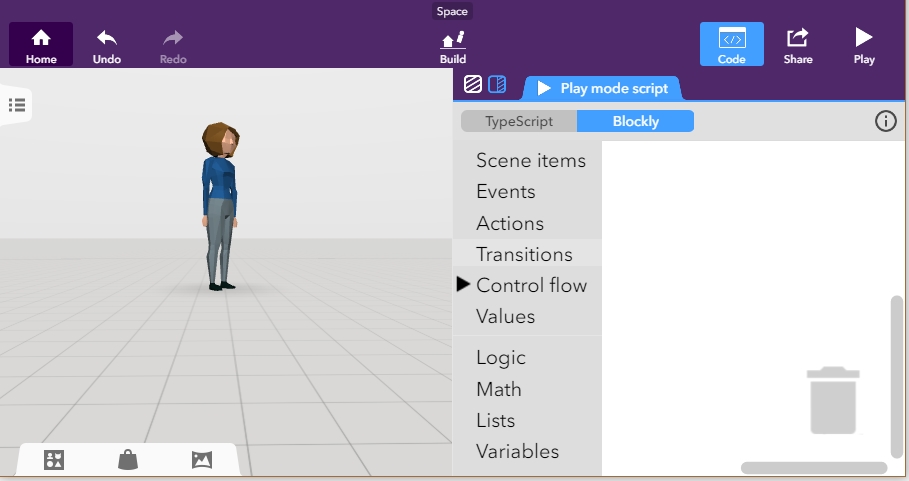
CoSpaces ressemble à Scratch dans son principe. Il est utilisable à partir de 10ans. Il devrait permettre de modéliser et simuler le comportement d’un système, que ce soit sa cinématique, sa chaîne d’information, l’interaction avec son environnement, l’interaction avec un utilisateur, … Dans CoSpaces, la modélisation se fait à partir de bibliothèques d’objets 3D, mais on pourra prochainement importer des objets 3D issus d’un modeleur 3D quelconque. La modélisation du comportement des objets 3D (cinématique, interactions, …) se fait avec Blockly intégré à CoSpaces (depuis janvier 2017), comme dans Scratch. La simulation du comportement se fait en 3D temps réel, de manière interactive. Elle est même compatible avec les casques de réalité virtuelle (technologie en plein essor).
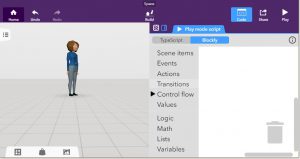
Voici la première simulation que j’ai faite en découvrant CoSpaces :
Décollage et atterrissage d’une fusée : https://cospac.es/W8GR
Capture vidéo d’un exemple très simple réalisé avec Blockly sur CoSpaces (source : LP2I)
3) Développements actuels de CoSpaces par Delightex
La société Delightex est une startup allemande d’une trentaine de personne. Elle est très intéressée par la collaboration avec les enseignants pour prendre en compte leurs besoins et leurs contraintes. J’échange très régulièrement des informations avec différentes personnes de Delightex, y compris sur les développements en cours :
. Traduction de CoSpaces en français et en chinois avec l’aide des élèves du LP2I (pour une prochaine version).
. Ajout de nouveaux blocs pour Blockly dans CoSpaces (fonctions avec paramètres, possibilité de créer de nouveaux blocs définis par l’utilisateur en JavaScript directement dans Blockly, utilisation de l’audio, …).
. Partages paramétrables et automatisés des modélisations entre l’enseignant et ses élèves.
. Intégration d’un moteur physique (pour gérer la cinématique et les aspects physiques comme dans les jeux vidéos),
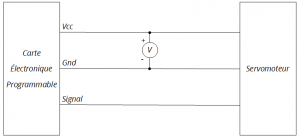
. Intégration de blocs compatibles Arduino pour pouvoir expérimenter avec un système réel comme avec Blockly Arduino (Un développeur a été embauché pour ce nouveau projet de Delightex et Sébastien Canet, enseignant-formateur à Nantes, développeur de Blockly Arduino, souhaite collaborer).
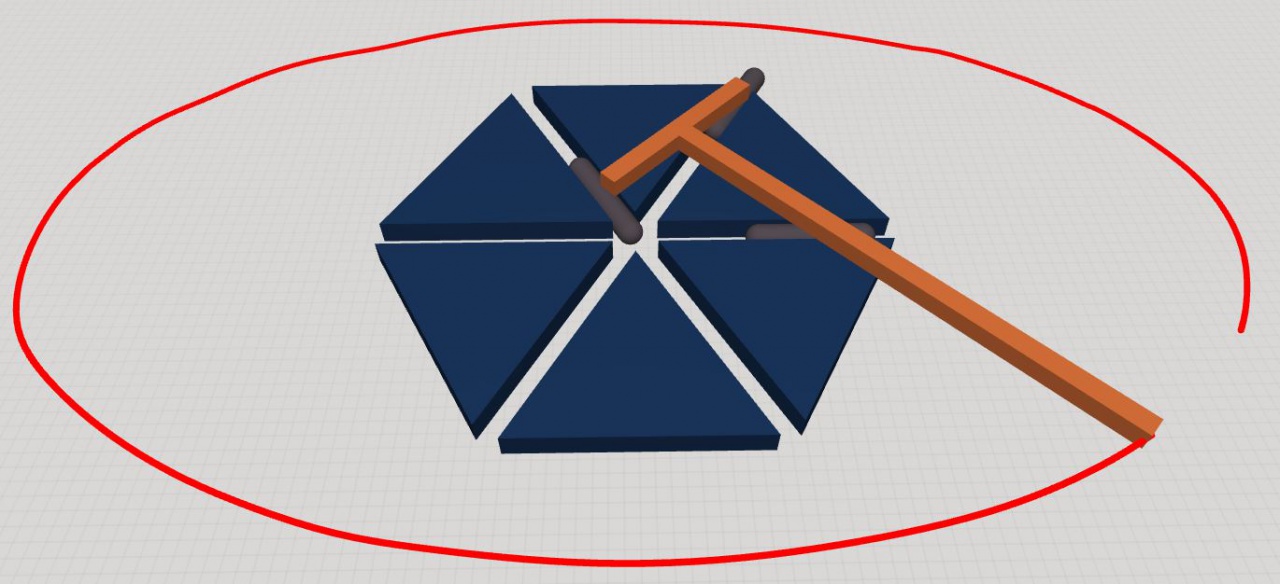
Exemples utilisant des fonctionnalités en cours de développement :
. Ellipsographe (Mécanisme constitué de pièces simples, avec 3 axes de rotation et 3 axes en translation) : https://cospac.es/bo3e

. Billard (Cinématique avec collisions, gestion du comportement physique, interactivité et audio) : https://cospac.es/go1w
4) Premier test de CoSpaces au LP2I
J’ai testé hier (07/03/2017) pour la première fois CoSpaces avec mes élèves de 1ère SI au LP2I : ils ont très bien accueilli ce nouvel outil pédagogique. Un élève a fait ce commentaire après cette première utilisation hier :
« CoSpaces est un logiciel « sans limite » qui peut permettre aux établissements tels que les collèges et les lycées de réaliser des projets innovants. De par son côté « enfantin », facile, mais aussi grâce à son côté « poussé », il pourrait être une révolution par rapport aux autres logiciels habituellement utilisés en Technologie et en Sciences de l’Ingénieur. De plus, son approche avec Blocky est convaincante, si on est assisté avec un tutoriel et des consignes précises sur des exemples. »
Je leur avais préparé ce tutoriel sur CoSpaces, sur lequel je suis en train de travailler :
https://drive.google.com/open?id=0B-rRjoDMbM0iRUZVak5YWjFvVHc
Je leur avais donné également ce document avec des questions sur quelques exemples simples (document qui ne me satisfait pas beaucoup pour le moment, car je manquais de temps pour préparer cette première utilisation) :
https://drive.google.com/open?id=0B-rRjoDMbM0iVEdfUlgwYXJUM2s
Je suis prêt à collaborer à l’élaboration de séquences pédagogiques niveau lycée ou collège utilisant CoSpaces.
Edit 10/07/17
Quelques exemples de modélisations interactives réalisées avec CoSpaces sont donnée dans ce tutoriel (à mettre à jour) :
https://drive.google.com/open?i
– Show Laser avec des têtes mobiles : https://cospac.es/WwaT
– Robot sur une table (à compléter par l’élève) : https://cospac.es/GkQ5
Version complétée : https://cospac.es/cQMJ
– Wintergatan marble machine (version simplifiée) : https://cospac.es/XdQJ
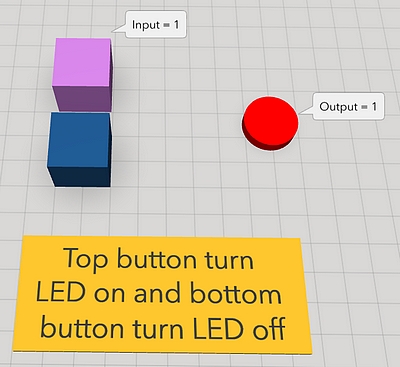
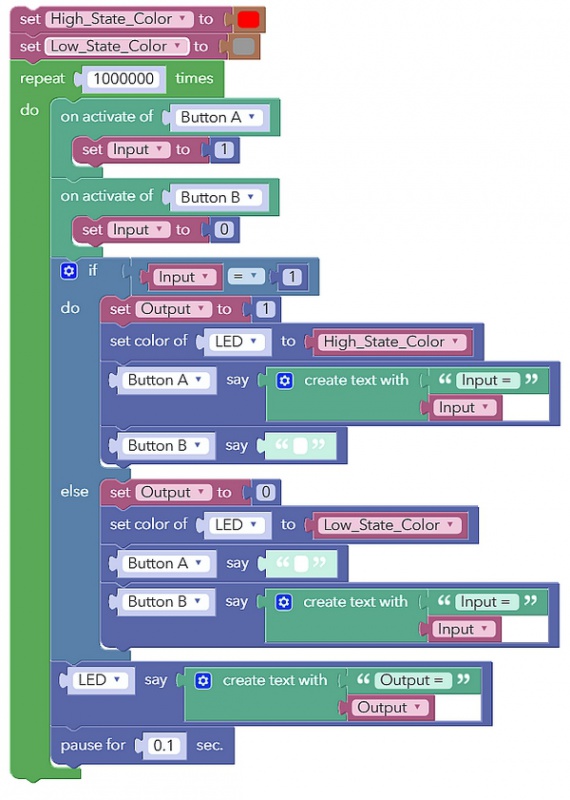
– LEDs RGB : https://cospac.es/KagO
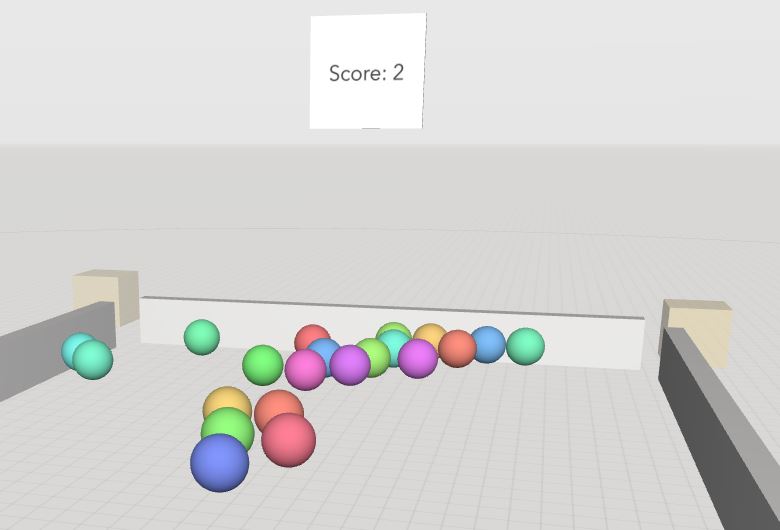
– Shoot in the ball : https://cospac.es/4c4R
– Interruption de mouvements : https://cospac.es/U1Ht
– Cinématique (8 scènes) : https://cospac.es/dLIp
– Story telling : https://cospac.es/bZTM
– Menu pop-up : https://cospac.es/qyoF
– Sélection et mélange de couleurs : https://cospac.es/naKv
– Test des mouvements de la caméra : https://cospac.es/alpG
– Demo nouvelle interface graphique : https://cospac.es/2r3V
– Lancé de dé : https://cospac.es/CG7E
– Création de fleurs : https://cospac.es/LCSB
————————————————————————————
– Manège : https://cospac.es/O3yj
– Dialogue (à compléter) : https://cospac.es/kLaC
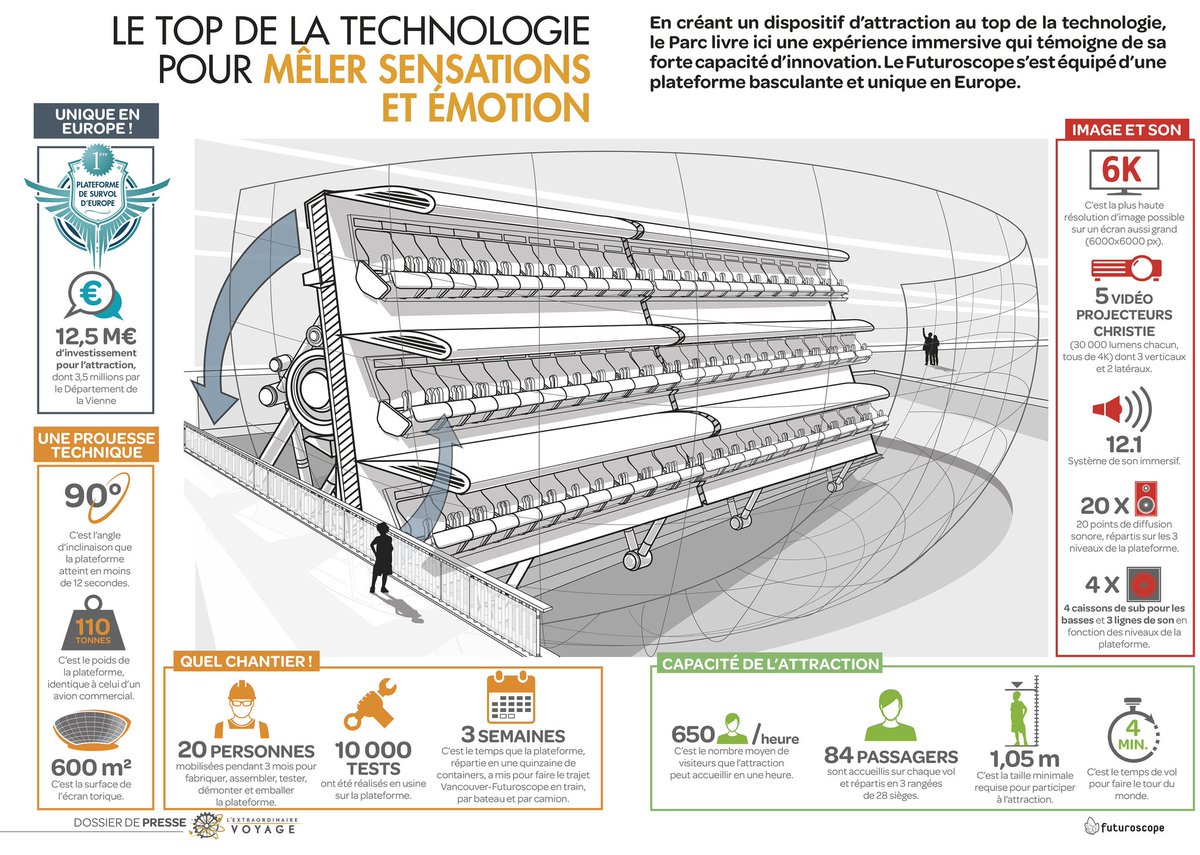
– Attraction du Futuroscope « Danse avec les robots » : https://cospac.es/q3GU
Pour l’école ouverte au Collège Jean Macé, se connecter à CoSpaces Edu :
https://edu.cospaces.io/#Login
avec les noms suivants :
… Eleve12_JM
Travaux réalisés par les élèves le lundi 10 juillet 2017 :
– Joris D. (6e2) Eleve2_JM : https://cospac.es/XX5f
– Oïhana R. (cm2) Eleve4_JM : https://cospac.es/tZRe
– Lenaick P. (6e1) Eleve5_JM : https://cospac.es/iV4t
– Silvan R. (6e1) Eleve6_JM : https://cospac.es/5NIL
– Rémy M. (5e2) Eleve7_JM : https://cospac.es/lJqq
Travaux réalisés par les élèves le mardi 11 juillet 2017 :
Travaux réalisés par les élèves le jeudi 13 juillet 2017 :
Edit 04/08/2017
En attendant qu’une autre solution existe, j’ai créé un compte Edu CoSpaces dans lequel je partage mes principaux espaces (avec des doublons que je ne peux pas supprimer).
Pour accéder à ce compte, vous n’avez pas besoin d’avoir un compte CoSpaces. Cliquez simplement sur ce lien:
Https://edu.cospaces.io/#Login
Si vous avez un compte CoSpaces, vous devez d’abord vous déconnecter.
Ensuite, entrez ceci:
Nom d’utilisateur: lp2i_guest
Mot de passe: lp2i2017
Si vous modifiez un espace ou un code, cliquez sur « recommencer ».
Les commentaires sont bienvenus.
Edit 22/08/2017
Ecole ouverte au collège Jean Macé de Châtellerault
Exemples d’animations 3D réalisées avec CoSpaces :
– Manège : https://cospac.es/O3yj
– Dialogue (à compléter) : https://cospac.es/kLaC
– Attraction du Futuroscope « Danse avec les robots » : https://cospac.es/q3GU
– Monoroue : https://cospac.es/2K1U
– Hélicoptère : https://cospac.es/PfEJ
– Feu tricolore : https://cospac.es/13YD
– Piano : https://cospac.es/XHS6
– Airbus A350 : https://cospac.es/Wl1A
– Imprimante 3D : https://cospac.es/ratu
– Test d’une nouvelle interface graphique : https://cospac.es/MuwH
– Décollage fusée : https://cospac.es/GDgT
Pour pouvoir créer vos propres animations 3D, se connecter à CoSpaces Edu :
https://edu.cospaces.io/#Login
avec les noms suivants :
Eleve2_JM …
Travaux réalisés par les élèves le jeudi 24 août 2017 :
Daniel Pers, enseignant en Sciences de l’Ingénieur au LP2I



































.gif){kind=link}