Comment les roues tournent-elles lors des différents déplacement du robot ?
Les deux roues ont chacune 3 états: marche avant, arrêt, marche arrière.
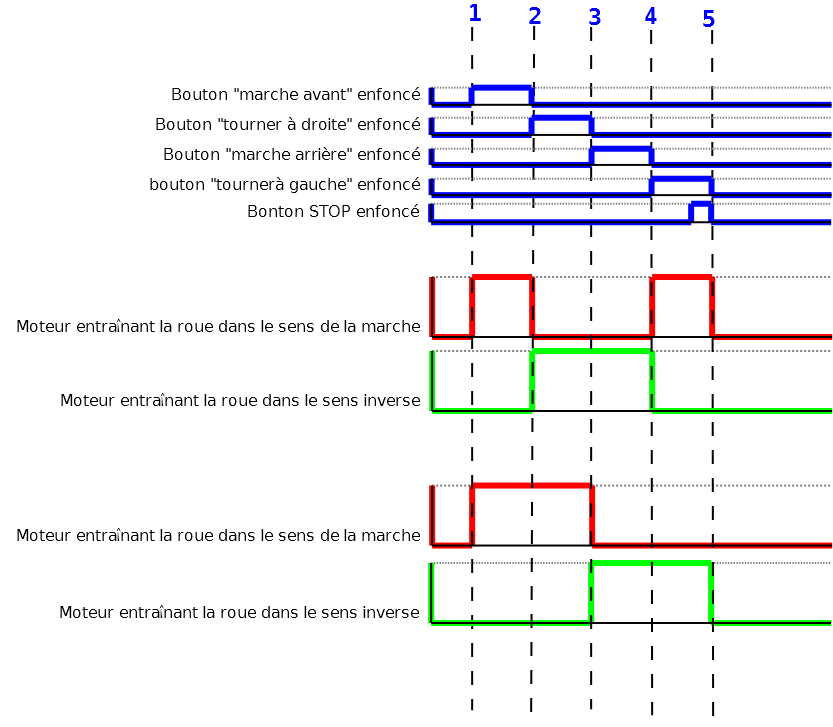
L’utilisateur fait 5 actions différentes:
1: L’utilisateur appuie sur le bouton « marche avant »
2: L’utilisateur appuie sur le bouton « tourner à droite »
4: L’utilisateur appuie sur le bouton « marche arrière »
3: L’utilisateur appuie sur le bouton « tourner à gauche »
5: l’utilisateur relâche le bouton « stop »
Source: LPII
On observe que lorsque le robot roule en marche avant, les deux roues sont en marche avant. Lorsqu’il tourne à droite, la roue gauche roule en marche avant tandis que la droite tourne dans le sens contraire. Lorsqu’il tourne à gauche, c’est l’inverse: la roue droite est en marche avant quand la gauche est en marche arrière. Lorsque que le robot recule, les deux roues sont en marche arrière. Quand le robot est à l’arrêt les deux roues sont immobiles.
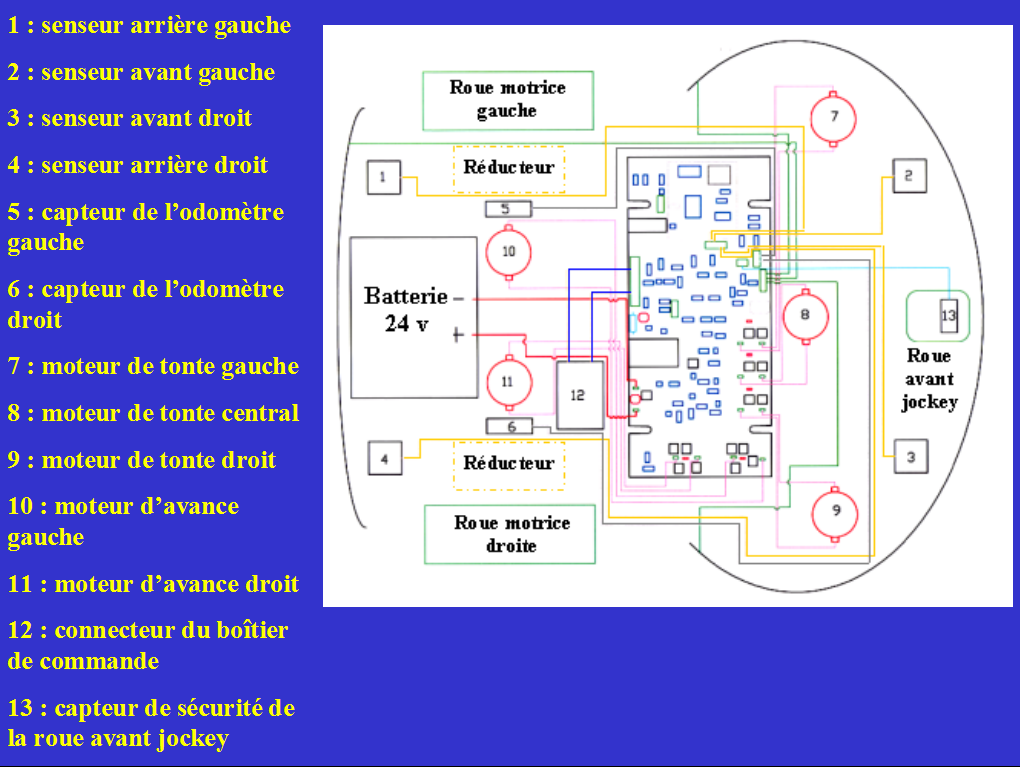
Chaque roue est entrainée par un moteur différent à double sens de rotation. En plus, chaque moteur peut entrainer sa roue à deux vitesses différentes.
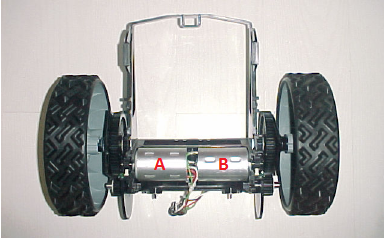
Image académie de Nancy et Metz.
A : Moteur gauche.
B : Moteur droit.