
présentation:
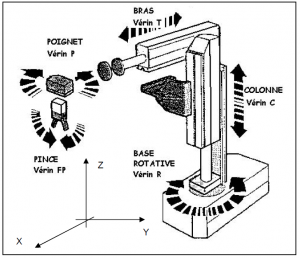
Afin d’améliorer les performances du bras nous avons eu comme idée de rajouter un système d’engrenage avec un moteur électrique qui permettrait au bras avec la pince de se déplacer du haut vers le bas mais, indépendamment du bras principal et de rajouter au milieu du bras ce même principe de système pour améliorer la mobilité de l’appareil voir le schéma ci-dessous :
mouvement avant amélioration :
mouvement après amélioration:

source:
-la SI au lp2i
–http://lyc89-fourier.ac-dijon.fr/sti2d/?p=1088