SI
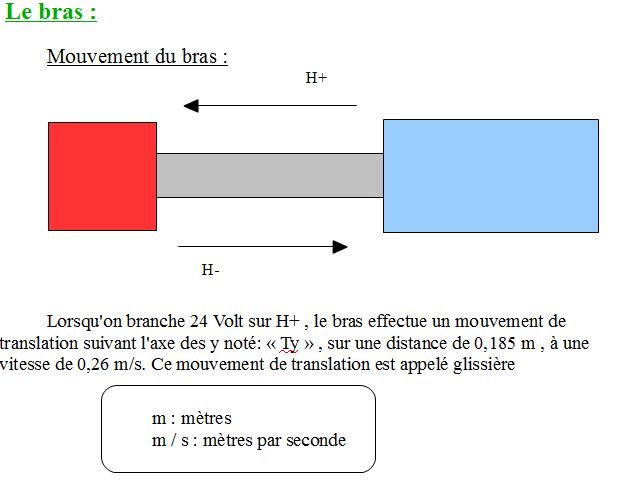
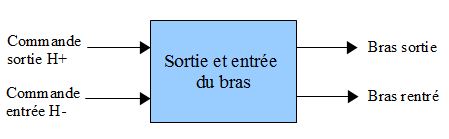
Le bras manipulateur
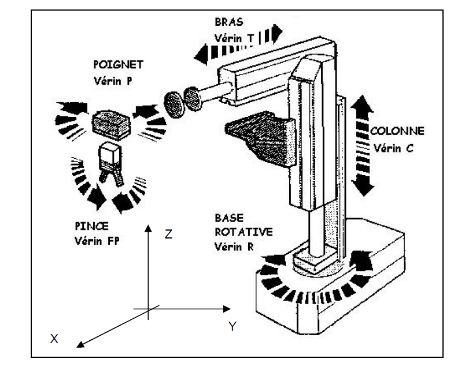
Schéma bras manipulateur
http://wikimeca.org
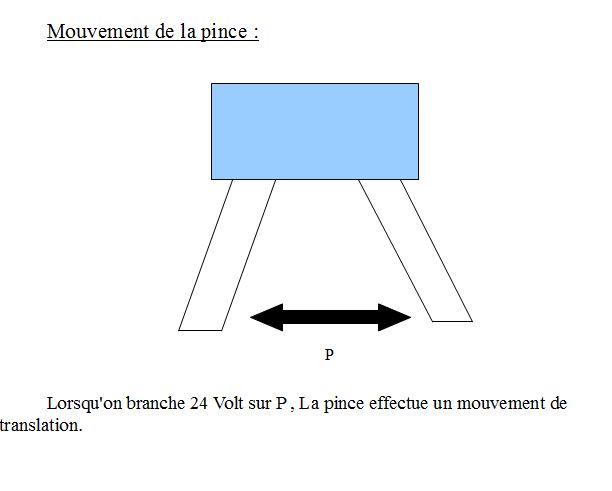
La pince
|
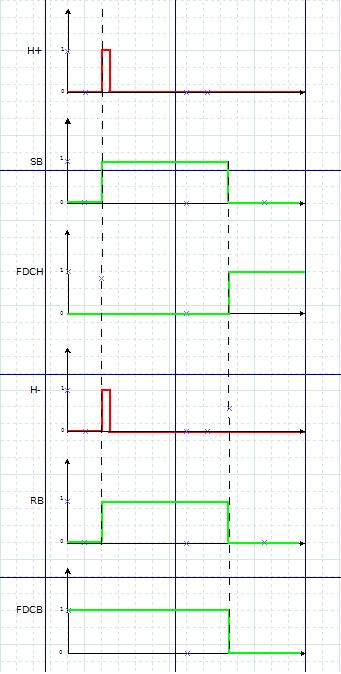
H+ |
H- |
Bras sorti |
Bras rentré |
|
1 |
0 |
1 |
0 |
|
0 |
1 |
0 |
1 |
|
0 |
0 |
0 |
0 |

SI
Le bras manipulateur
Schéma bras manipulateur
http://wikimeca.org
La pince
|
H+ |
H- |
Bras sorti |
Bras rentré |
|
1 |
0 |
1 |
0 |
|
0 |
1 |
0 |
1 |
|
0 |
0 |
0 |
0 |
Dia est un logiciel libre (open source) de dessin vectoriel permettant de tracer toutes sortes de diagrammes.
Quelques liens utiles :
Le site du projet Dia (anglais)
Dia sur Framasoft (français)
Télécharger Dia sur Sourceforge.net
Télécharger Dia en version portable sur sourceforge.net.
Vous pouvez installer Dia sur votre PC quelle que soit sa version de Windows. Il existe des versions pour les autres OS, y compris Android. Il existe des versions portables.
Pour tracer des chronogrammes avec Dia :
1) Lancer Dia.
2) Choisir “Chronogramme”. 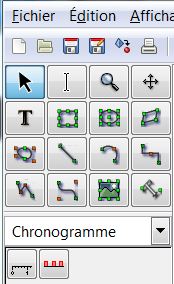 3) Sélectionner “Ligne de données” et créer une ligne de données.
3) Sélectionner “Ligne de données” et créer une ligne de données.
Pour créer une ligne de donnée avec l’outil corespondant il faut cliquer à l’endroit où on veux une ligne de donnée puis tirer pour définir la taille du chronogramme.
4) Ajouter éventuellement une base de temps avec l’outil correspondant à gauche.
5) Editer les propriétés
On peut choisir la date de début et de fin.
Pour des signaux logiques on peut choisir des temps de montés et de descente nuls.
On peut choisir l’aspect des lignes, les polices, …
Voici un exemple (téléchargeable ici : Diagramme241112 )

Pour spécifier la position des commutations (fronts) appelés évènements, la syntaxe est simple mais peu intuitive.
Pour le signal A1 on peut mettre les évènements suivants : @0)5(2)8(3)17(
@0 permet de commencer à t = 0. )5 correspond à un front descendant suivi d’un état bas de 5s (2 correspond à un front montant suivi d’un état haut de 2s etc …
Cette description aurait pour inconvénient de faire apparaître un front descendant initialement. Si on commence directement par le front montant à t = 5s le signal serait indéterminé avant. La solution que j’utilise donc est d’initilaiser avec un front descendant à t = -1, de manière invisible. Ce qui donnerait : @-1)6(2)8(3)17(
On peut simplifier ici en définissant chaque impulsion indépendamment les une des autres : @-1@5(2)@15(3)@35(
6) Dupliquer et modifier les autres chronogrammes
Par exemple pour A2 : @-1)@5(3)@15(4)@35(
7) Ajouter des lignes pointillées verticallement pour préciser les évènements synchrones.
8) Exporter au format souhaité, JPEG par exemple, pour pouvoir ensuite insérer le diagramme sous forme d’une image dans un document, un blog, …
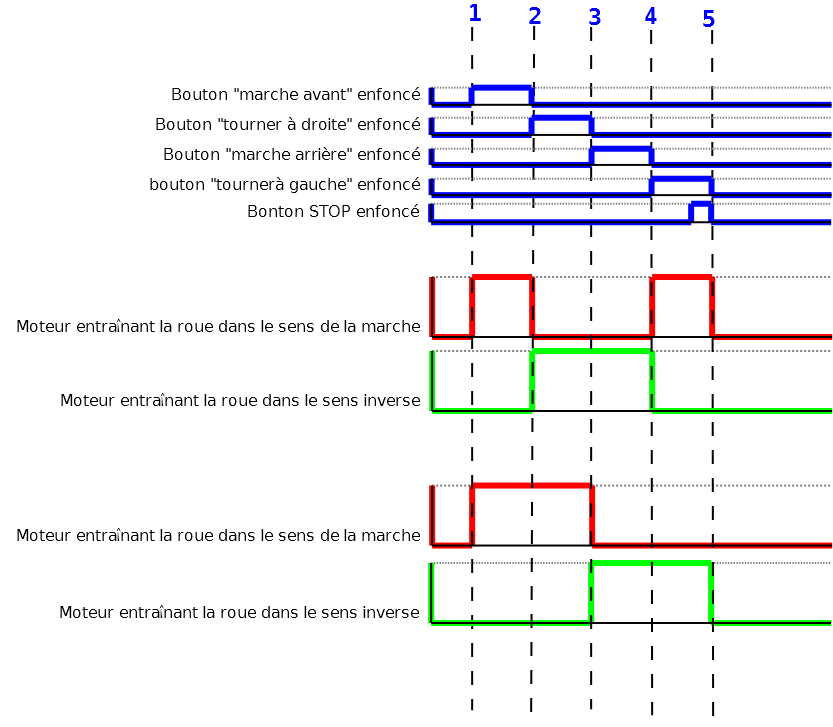
Comment les roues tournent-elles lors des différents déplacement du robot ?
Les deux roues ont chacune 3 états: marche avant, arrêt, marche arrière.
L’utilisateur fait 5 actions différentes:
1: L’utilisateur appuie sur le bouton “marche avant”
2: L’utilisateur appuie sur le bouton “tourner à droite”
4: L’utilisateur appuie sur le bouton “marche arrière”
3: L’utilisateur appuie sur le bouton “tourner à gauche”
5: l’utilisateur relâche le bouton “stop”
Source: LPII
On observe que lorsque le robot roule en marche avant, les deux roues sont en marche avant. Lorsqu’il tourne à droite, la roue gauche roule en marche avant tandis que la droite tourne dans le sens contraire. Lorsqu’il tourne à gauche, c’est l’inverse: la roue droite est en marche avant quand la gauche est en marche arrière. Lorsque que le robot recule, les deux roues sont en marche arrière. Quand le robot est à l’arrêt les deux roues sont immobiles.
Chaque roue est entrainée par un moteur différent à double sens de rotation. En plus, chaque moteur peut entrainer sa roue à deux vitesses différentes.
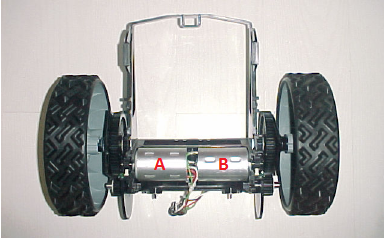
Image académie de Nancy et Metz.
A : Moteur gauche.
B : Moteur droit.
– Les vérins dans le système Majoric

Le distributeur commande le vérin à partir des ordres de la chaîne d’informations. Le vérin transforme l’énergie pneumatique en énergie mécanique. Source : david.granjon.free.fr
– La commande d’un vérin par un distributeur (pdf. Source : siloged.fr)
– Commande de vérins simple effet et double effet par distributeurs bistable ou monostable :
Lien vers une animation en Flash (source : mecamedia.info)

Animation Flash. Source : mecamedia.info
– Commande d’un vérin pneumatique double effet par distributeur bistable :
Lien vers une animation en Flash (source : mecarazi.com)
– Les distributeurs pneumatiques (source : geea.org.pagesperso-orange.fr)

Distributeur 4/2 = 4 orifices et 2 positions. Source : geea.org.pagesperso-orange.fr

Commande Bistable : le distributeur garde sa position en l’absence de signal de pilotage (fonction mémoire). Source : geea.org.pagesperso-orange.fr

Commande monostable : le distributeur est rappelé dès la disparition du signal de pilotage par un ressort. Source : geea.org.pagesperso-orange.fr
Si vous voulez voir, les fonctions liées à ce chronogramme, c’est ICI.
Si vous voulez voir, les variation de tension et les risques pour l’utilisateur, c’est ICI.
ET si vous voulez voir, la suite des risques pour l’utilisateur, c’est ICI.
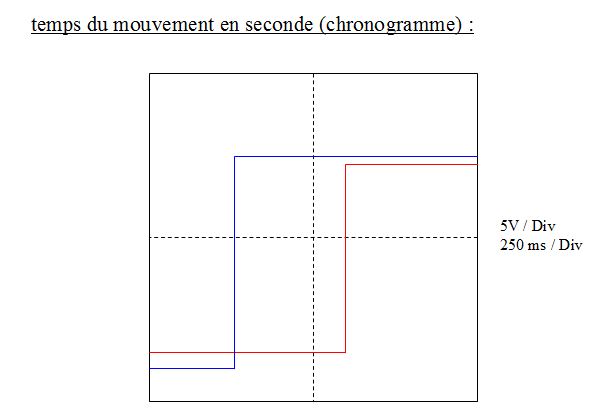
Nous allons voir dans cet article un chronogramme et une caractéristique de transfert du contrôleur de batterie.
Tout d’abord, le chronogramme:
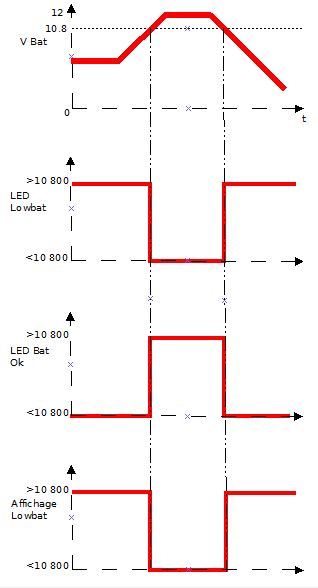
Source: Image LP2I
Ensuite, la caractéristique de transfert:
Source: Image pour le LP2I
Le métier d’ingénieur
Au sein d’une entreprise, un ingénieur a des responsabilités importantes. Elles peuvent être fonctionnelles (responsable de projets) ou hiérarchiques (responsable d’un service).
Chef de projet
Un ingénieur responsable de projets travaille généralement avec une équipe de spécialistes de leur domaine, pas forcément que des techniciens (exemples : marketing, logistique, …). Il est responsable de l’avancement du projet et donc du travail des personnes qui travaillent pour son projet. Mais ces personnes ne travaillent pas que pour lui. Par exemple, un technicien qui s’occupe d’une machine spécifique sur une chaîne de production, peut être ammené à faire des essais ponctuellement pour un projet. Dans ce cas l’ingénieur devra par exemple décider avec son équipe si on modifie le nouveau produit en cours d’étude ou si on modifie le processus de production. Il doit être capable de dialoguer avec des personnes qui ont des compétences très variées. Il peut être amené aussi à dialoguer avec des clients, des fournisseurs, des partenaires, …
Chef de service
Un ingénieur responsable d’un service travaille avec une équipe de spécialistes d’un même domaine, par exemple concevoir et mettre en place les moyens nécessaires pour tester les produits fabriqués sur un site de production. Il sera responsable hiérarchiquement du travail de chacun des membres de son équipe. Il devra répartir les tâches en fonctions des compétences, des disponibilités, … Il devra gérer leur formation, leur évolution de carrière, … Lui aussi peut être amené à dialoguer avec des clients, des fournisseurs, des partenaires, …
Ainsi, dans la plupart des entreprises, sauf les petites entreprises, une personne partie prenante dans un projet dépend souvent à la fois d’un Ingénieur Chef de projet et d’un Ingénieur Chef de service. On parle alors d’une organisation matricielle avec des responsabilités hiérarchiques dans une direction et des responsabilités fonctionnelles (les projetsà dans une autre direction.
Un ingénieur peut être amené à travailler sur un produit tout au long de la vie de ce produit : définition du besoin et analyse du marché (marketing, commerce), conception du produit et du processus de fabrication, achats et approvisionnements, production, tests, logistique, vente, services après vente, recyclage, … Voici quelques exemples :
1) Ingénieur bureau d’études (R & D), dans différents domaines :
– l’informatique
– les équipements pour l’automobile
– l’aéronautique, les hélicoptères
– la construction en bois
– les articles de sport, …
2) Ingénieur dans une société de services, dans différents domaines tels que :
– les réseaux informatiques
3) Ingénieur centré sur des activités commerciales en lien avec des clients ou des fournisseurs (ingénieur technico commercial, acheteur, logistique, …)
4) Ingénieur dans un centre de production (méthode, pocess, fabrication, …)
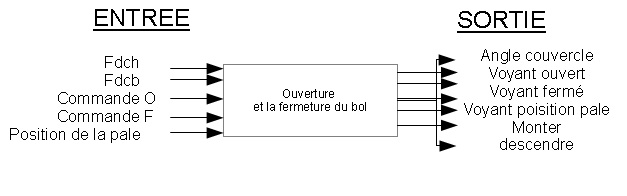
Les entrées et sorties du système permettant l’ouverture et la
fermeture du bol.
Source : Lp2i
Le protocole expérimentale de l’analyse du malaxeur ce trouve ici.
Après avoir vu le chronogramme caractéristique du système voici le tableau récapitulatif de celui-ci :
| Voltage du variateur de tension (en Volt) | Valeur du “N” indiquée par le système | Tension indiquée par le système (en mV) | Low Bat | couleur LED |
|---|---|---|---|---|
| 5 | 255 | 5000 | Oui | Rouge |
| 10 | 520 | 10000 | Oui | Rouge |
| 10.8 | 550 | 10800 | Variation entre oui et non (donc le seuil de Low Bat) | Variation rouge ou verte (du au seuil) |
| 15 | 770 | 15000 | Non | Verte |
Concernant les risques, le contrôleur de batterie n’est juste qu’une une carte électronique. Elle est donc très fragile et sensible au chocs il faudrait donc remédier à cela en y ajoutant une coque ( plastique au autre matière solide non métallique ) pour la protégée des chocs et de l’utilisateur. L’autre risque est au niveau du branchement comme l’a très bien expliquer Sylvain dans son article : Les risques du contrôleur de batterie.
Vous pouvez aussi voir d’autres mesures avec l’article de Guillaume : Mesures du Contrôleur de batterie avec piles.