Étude 2 : Les Transports propres
Introduction
Les activités humaines sont à l’origine de l’émission de nombreux gaz à effet de serre. Ces émissions de gaz à effet de serre contribuent de plus en plus fortement aux changements climatiques. C’est pourquoi le travail d’un ingénieur de notre époque consiste à éco-concevoir ces produits. Le secteur des transports et l’utilisation de moteurs thermiques fonctionnant avec des carburants issus d’énergies fossiles ont donc une grande importance dans l’origine des changements climatiques actuels. Des évolutions technologiques permettent de réduire les émissions de CO2, mais ces évolutions sont plus lentes dans le secteur des transports que dans les autres secteurs d’activité. Il devient donc urgent de développer des transports propres réellement compétitifs. Le changement de motorisation est une des évolutions majeures dans le domaine des transports. Les motorisations électriques correspondent aujourd’hui à la solution généralement retenue pour réduire les émissions de CO2.
Problématique
Comment un moyen de transport utilisant une motorisation électrique peut être compétitif et avoir un faible impact environnemental ?
Pour répondre à cette problématique, nous avons choisi d’étudier une voiture hybride, la Prius 2 de chez Toyota.

La Toyota Prius II hybride Source: http://abcmoteur.fr
I) Analyse du besoin
1) Comment exprimer le besoin ?
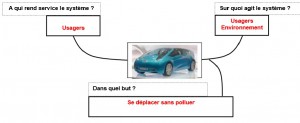
Schéma bête à corne de la Prius II
Source: http://consmecapro.free.fr
2) Comment satisfaire le besoin ?
Pour satisfaire un besoin, un système est composé de plusieurs constituants, eux-mêmes constitués de composants.
Par exemple, le système qui est ici, notre Prius 2, est constitué de différents constituants comme : une motorisation, une unité de contrôle, une carrosserie, une batterie, un train avant.
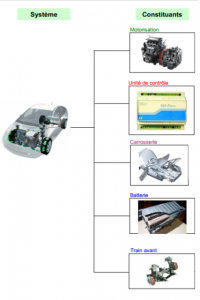
Principaux constituants Source: http://consmecapro.free.fr
II) Fonctionnement vu de l’utilisateur
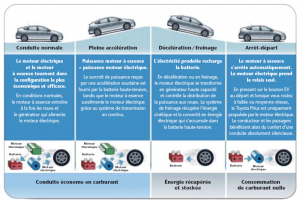
Différentes phases de fonctionnement des moteurs Source: http://www.des.pf
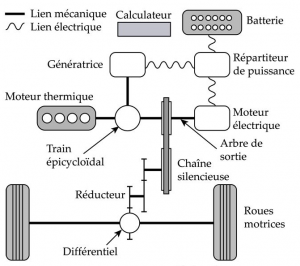
III) Chaîne d’énergie
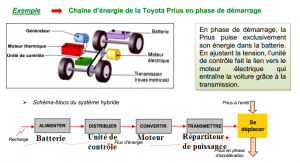
Source: http://consmecapro.free.fr
IV) Chaîne d’information
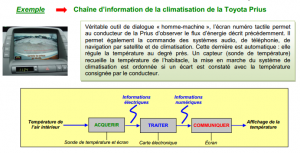
http://consmecapro.free.fr
V) Un véhicule préservant l’environnement sur tous les points
En plus de préserver l’environnement lors de son utilisation, la Toyota Prius II le préserve en fin de vie. Le véhicule est à 90 % recyclable. De plus, chaque élément est clairement identifié et se démonte facilement pour simplifier et accélérer le démontage du véhicule en fin de vie.
La conception de la Prius 2 a été modifiée par rapport au processus de fabrication de la Prius 1 afin de réduire l’émission de CO2 lors de sa fabrication. Ainsi, cette modification de la fabrication de la Prius 2 a permis de faire baisser l’émission de CO2 de 31 %.
Sur l’analyse du cycle de vie (qui est un moyen d’évaluer les impacts environnementaux d’un produit), par rapport à une voiture essence de même gabarit, la Toyota Prius 2 émet 32 % de CO2 en moins.
La Toyota Prius 2 est équipée d’un système de climatisation intégralement électrique. Alors que sur une voiture classique, le système est entraîné par le moteur, dans la Prius, les éléments sont alimentés par l’inverseur à courant alternatif et l’inverseur à courant continu intégrés au système hybride. Ceci permet une réduction de 15 à 20 % de la consommation.
VI) Cahier des charges Toyota Prius 2
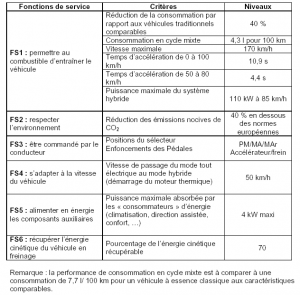
Cahier des charges de la Toyota Prius 2
Source: http://taaone-sti2d.fr
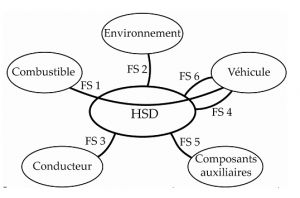
Diagramme pieuvre du système Prius 2
Source: http://taaone-sti2d.fr
VII) Fonctionnement a l’intérieur de la Prius
Fonctionnement motorisation
http://www.des.pf/itereva/disciplines/sti/prod/ETC/02/C021/23/hybride/hybride.html?analyse.html
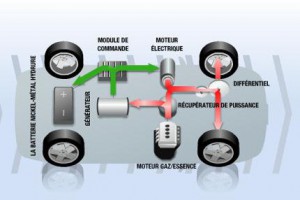
Schéma du fonctionnement énergétique de la motorisation
http://blog.jeveux1truc.fr/wp-content/uploads/2014/04/hybride-fonctionnement2.jpg
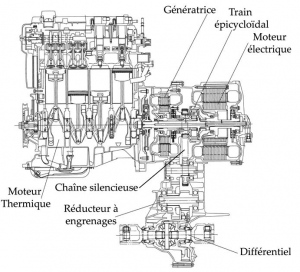
Schéma des moteurs http://www.des.pf/itereva/disciplines/sti/prod/ETC/02/C021/23/hybride/hybride.html?analyse.html

Moteurs Toyota Prius 2 http://www.automobile-magazine.fr
VIII) Les facteurs influençant les performances
1) Comparaison des frottements aérodynamique et des frottements de roulement entre la Toyota Prius 2 et la Renault Laguna 2

Toyota Prius 2 http://images.caradisiac.com

Renault Laguna 2 http://www.motorstown.com
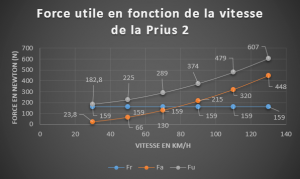
Lorsque la voiture roule, différentes forces s’appliquent sur celle-ci. Il y a tout d’abord la force P correspondant au poids du véhicule qui est donc lié à la gravité ainsi que la force R correspondant à la réaction de la route sur la voiture. Ces forces sont verticales pour un déplacement horizontal et donc n’ont pas d’effet énergétique sur le véhicule. En plus de ces forces il y a la force Fu correspondant à la force utile nécessaire pour maintenir constante la vitesse du véhicule. Cette force compense notamment la force Fr correspondant à la force de frottement de roulement et la force Fa qui est la force aérodynamique.
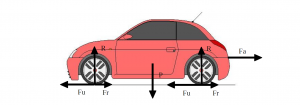
Source : lp2i EF 6
Fa = 1/2 ρ.V2.S.Cx
Quand on regarde l’équation, on voit que la force aérodynamique (Fa en N) est liée à la masse volumique de l’air qui est constante et qui est de 1,2kg/m3 (ρ), à la vitesse au carré (V en m/s), à la surface frontale du véhicule (S en m²) et au coefficient d’efficacité aérodynamique (Cx).
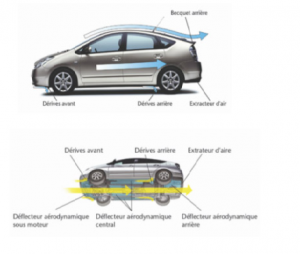
Un déflecteur aérodynamique est un élément de la carrosserie permettant d’orienter un flux d’air vers une direction souhaitée ou de l’en écarter.
Comme la force utile compense la force de frottement aérodynamique et la force de frottement de roulement, Fu = Fa + Fr
Donc plus Fa sera petit, plus Fu le sera aussi, et donc moins il faudra d’énergie pour compenser ces forces.
|
Cx
|
S
|
SCx
|
|
Prius 2
|
0,26
|
2,2m²
|
0,57m²
|
|
Laguna 2
|
0,32
|
2,1m²
|
0,67m²
|
L’équation liée à la force de roulement est Fr = Cr . m . g où m représente la masse du véhicule, exprimé en kg. g l’accélération terrestre en m/s2 et Cr le coefficient de résistance au roulement. Alors que les constructeurs devaient faire varier la surface frontale du véhicule et sa capacité de résistance à la pénétration dans l’air pour réduire les forces de frottement aérodynamique, ils doivent, pour faire varier les forces de frottement de roulement, faire varier la masse du véhicule et faire varier les pneus (la surface de contact, la matière..).
|
Cr
|
m
|
|
Prius 2
|
0,012
|
1350kg
|
|
Laguna 2
|
0,012
|
1300kg
|
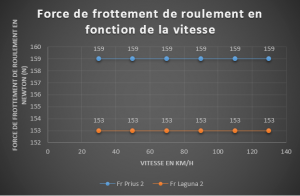
La légère différence de force de frottement de roulement est due à la légère différence de masse des deux véhicules.
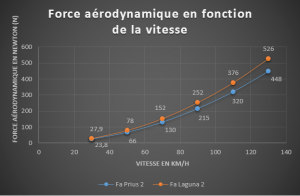
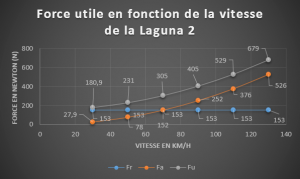
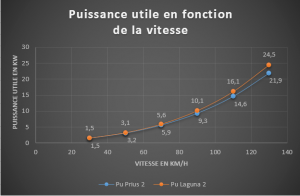
Étant donné que nous avons Fa et Fr, nous pouvons tracer Fu en fonction de la vitesse, selon les deux véhicules :
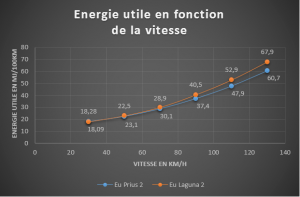
Nous admettons que la vitesse est constante sur une distance de 100km, nous pouvons calculer l’énergie utile aux deux voitures pour parcourir cette distance pour une vitesse donnée.
Eu = Fu . D où D en m, donc D = 100 000m ici, Fu en newton (N) et Eu en joule (j)
Pour une distance de 100km :
On peut également calculer la Puissance utile nécessaire aux véhicules pour compenser les forces Fa et Fr à tout instant. Pour cela on utilise la relation Pu = 1/2 ρ.V3.S.Cx + Cr .m.g.V + m. a.V
On considère ici m.a.V = 0 car la vitesse est constante et qu’il n’y a pas de phase d’accélération.
|
S
|
Cx
|
Cr
|
m
|
g
|
ρ
|
|
Prius 2
|
2,2m²
|
0,26
|
0,012
|
1350kg
|
9,81m/s²
|
1,2 kg/m³
|
|
Laguna 2
|
2,1m²
|
0,32
|
0,012
|
1300kg
|
9,81m/s²
|
1,2 kg/m³
|
Pour le cycle européen :
Nous admettrons le résultat du calcul réalise par Michel Kieffer dans le cas du cycle européen NEDC .
Énergie utile à fournir à un véhicule dans le cas du cycle européen NEDC, ramenée à une distance de 100 km (le cycle NEDC ne fait que 11 km) :
Eu = 19,2.S.Cx + 0,82.Cr.m + 0,011.m
| Véhicule |
m (kg)
|
S
(m2)
|
Cx
(sans unité)
|
Cr
(sans unité)
|
Eu
(MJ /100 km)
|
Eu en litres de gasoil (équivalence)
|
Rejets de C02 (g, kg ou tonnes)
|
| Toyota Prius 2 |
1350
|
2,2
|
0,26
|
0,012
|
39,11 MJ/100km
|
1,09
|
2,8
|
| Renault Laguna 2 |
1300
|
2,1
|
0,32
|
0,012
|
40 MJ/100km
|
1,11
|
2,9
|
2) Phase d’accélération
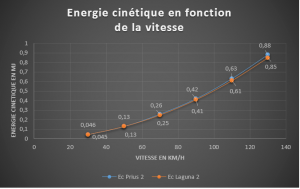
Pour accélérer, une voiture à besoin d’une énergie appelée énergie cinétique (Ec).
Ec = 1/2 mV²
Quand on regarde l’équation, on voit que l’énergie cinétique d’un véhicule est liée à sa masse et à sa vitesse. Les constructeurs vont donc faire varier la masse d’un véhicule pour pouvoir faire varier l’énergie nécessaire.
La masse de la Toyota Prius 2 est de 1350kg et la masse de la Renault Laguna 2 est de 1300kg.
|
Véhicule
|
m (kg)
(maxi)
|
V (km/h)
(maxi)
|
V (m/s)
(maxi)
|
Ec (kJ, MJ, ou GJ à préciser)
|
Ec (équivalent en litres de gasoil)
|
Rejets de C02 (g, kg ou tonnes)
|
|
Petite citadine allégée
|
600
|
50
|
14
|
59kJ
|
0,0016
|
4,2g
|
|
Voiture 2 :
routière standard
|
1600
|
130
|
36
|
1,0MJ
|
0,028
|
75g
|
|
Toyota Prius 2 Hybride
|
1350
|
130
|
36
|
875kJ
|
0,024
|
62g
|
|
Renault Laguna 2
|
1300
|
130
|
36
|
845kJ
|
0,023
|
60g
|
IX) Comparatifs Toyota Prius 2 et Renault Laguna 2
|
Toyota Prius 2
|
Renault Laguna 2
|
|
Énergie
|
Hybride
|
Essence
|
|
Moteur thermique
|
4 cylindres essence 1497 cm3
Puissance max 77 ch à 5000 tr/min
Couple max 117 Nm à 4000 tr/min
|
4 cylindres essence 1598 cm3
Puissance max 110 ch à 5750 tr/min
Couple max 148 Nm à 3750 tr/min
|
|
Moteur électrique
|
Synchrone à aimant permanent
Puissance max 68 ch
Couple max 400 Nm
|
|
|
Performances
|
Vitesse maxi :170 km/h
0-100 km/h :10,9 s.
|
Vitesse maxi :195 km/h
0-100 km/h :11,5 s.
|
|
Consommations (L/100km)
|
Cycle mixte : 4,3
Cycle urbain : 5,0
Cycle extra urbain : 4,2
|
7,2
|
|
Emissions de CO2 (g/km)
|
Cycle mixte : 104
|
175
|
|
Masse (kg)
|
1350
|
1300
|
Source : lp2i
X) Protocole expérimental
Problème
On sait que lorsque un véhicule roule à vitesse constante,
Pu = 1/2 ρ.V3.S.Cx + Cr .m.g.V + m. a.V et m. a.V = 0
Ce qui est surligné en rouge correspond à la force aérodynamique.
On cherche à connaître l’effet de la variation des facteurs V, S et Cx sur l’énergie fournie au moteur.
Hypothèses
– Étant donné que V est au cube, est-ce-que lorsqu’on double la vitesse, la force aérodynamique est 8 fois plus importante ?
– Quel paramètre influence le plus l’énergie donnée au moteur, S ou Cx ?
Expérimentation
Nous allons faire varier la taille (S) et la forme (Cx) des pâles ainsi que la vitesse de rotation (V) d’une hélice fixée sur l’axe d’un moteur, afin d’observer quelles influences ces paramètres ont sur l’énergie délivrée au moteur afin de garder une vitesse constante.
Est-ce réalisable à notre échelle ?
Pour cela nous allons nous aider de la relation V=R*w qui fait le lien entre vitesse instantanée (V en m/s) et la vitesse angulaire (w en rad/s) par rapport à la distance entre le point et l’axe de rotation (R en mètres). Il faut d’abord que l’on détermine à partir de quelle vitesse la force aérodynamique n’est plus négligeable face à la force de frottement de roulement car Pu = 1/2 ρ.V3.S.Cx + Cr .m.g.V + m. a.V
On sait que m. a.V = 0 car la vitesse sera constante.
Pour déterminer cela nous avons tracé les courbes représentatives de la force aérodynamique et de la force de frottement en fonction de la vitesse. Voilà ce que l’on obtient :
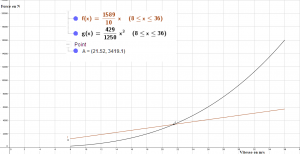
Source : lp2i
21,52 m/s = 77km/h
Il faudrait donc que notre dispositif dépasse les 77km/h pour qu’il puisse être efficace.
V=Rw donc R=V/w
Selon le site du constructeur de notre moteur, sa vitesse max est de 90tours/min soit 1,5tour/s.
1,5tour correspond à 3Π radian.
donc R = 21,52/3Π = 2,2m
Résultat
Notre protocole expérimentale ne pourra pas être mis en place à notre échelle car il faudrait un rayon d’au moins 2,2m pour atteindre des vitesses supérieur à 77km/h.
XI) Rendement
Le rendement des moteurs est une valeur à prendre en compte car elle correspond à la quantité finale d’énergie à la sortie du moteur par rapport à l’énergie entrante. Un moteur électrique synchrone à aimant permanent peut atteindre un rendement de près de 95 % ce qui signifie qu’il n’y a qu’environ 5 % de perte sous forme de chaleur. Un moteur thermique possède quant à lui un rendement très faible d’environ 35 % et donc des pertes de 65 %. Ceci veut dire que pour avoir la même énergie en sortie de chaque moteur, il ne faudra pas la même quantité d’énergie en entrée pour chacun de ces moteurs. Il faudra 2,7 fois plus d’énergie à l’entrée d’un moteur thermique pour avoir en sortie la même quantité d’énergie que le moteur synchrone à aimant permanent. C’est pourquoi le ingénieurs favorisent cette solution technique, cela leur permet d’avoir moins de perte. De plus, étant donné qu’il y a moins de perte, cela veut dire que le moteur chauffe moins et qu’il n’a pas besoin d’un système de refroidissement important.
Moteur synchrone à aimant permanant http://www.directindustry.fr

Moteur thermique http://www.moteurnature.com
Conclusion
La hausse du coût des produits pétroliers ainsi que la nécessité impérieuse de réduire les émissions de co2 imposent aux ingénieurs de trouver de nouvelles solutions techniques pour les transports de demain.
Une voiture hybride contient deux sources d’énergie, l’une thermique et l’autre électrique. Le moteur thermique est utilisé lorsque les batteries sont vides, ou quand le moteur électrique ne fournit plus assez de puissance. Comme la voiture hybride consomme moins d’essence, elle est par conséquent moins polluante.
De plus, de nombreux véhicules hybrides, comme la Prius 2 de chez Toyota, grâce à différents systèmes, récupèrent l’énergie normalement perdue pour recharger la batterie du véhicule. Cette Prius 2 est protectrice de l’environnement tout au long de son cycle de vie, lors de sa fabrication, de son utilisation et de son recyclage.
La Prius 2 possède un très bon coefficient de pénétration dans l’air, ce qui va limiter sa consommation d’énergie face aux forces aérodynamiques lorsque l’on atteint des vitesses élevées. Les ingénieurs font variés ces paramètres cités dans cette étude, afin de réduire la consommation d’un véhicule et son émission de CO2, mais le véhicule doit rester performant face à la concurrence des autres produits proposés aux usagers.