
=> Quelles sont les solutions innovantes retenues par le constructeur pour obtenir les performances souhaitées ?
=> Ces solutions correspondent-elle à un bon compromis pour le développement durable ?
1/ Présentation
La World Trade Center est un immeuble situé dans la ville de New York, conçu par l’architecte Minoru Yamasaki et a été inauguré le mercredi 4 avril 1973.
Il a était construit après la seconde guerre mondial pendant une période ou les États-Unis
connaissaient une grande période économique (1958 – 1973). Marquées par un incendie le 13 février 1975 puis par un attentat à la bombe le 26 février 1993, les tours jumelles ont été intégralement détruites par deux avions détournés le 11 septembre 2001.
2/ Structures porteuses
A – Analyse
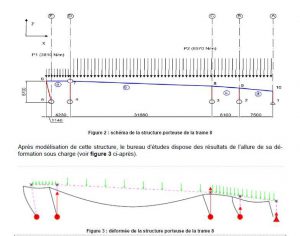
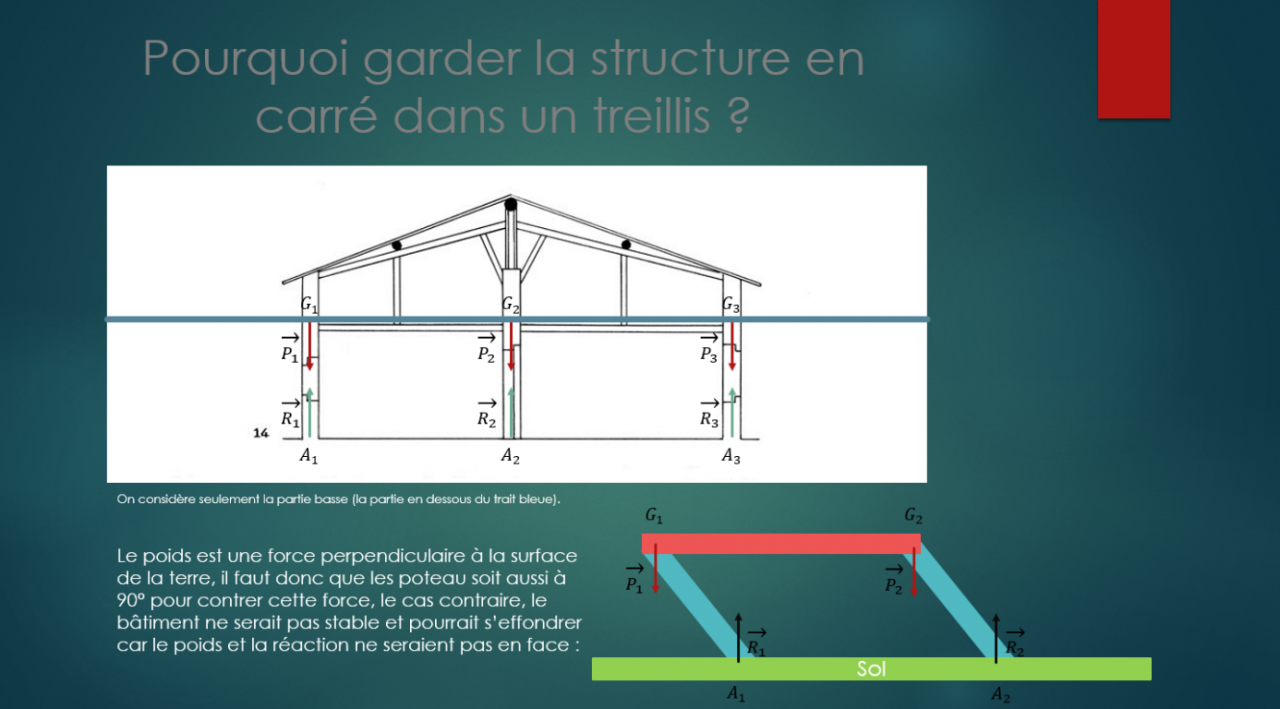
La structure porteuse était conçu en acier et de béton. Elle est présenté verticalement comme si la largeur du bâtiment est tangente à la sphère de la Terre, puis perpendiculairement au plancher. Il y a également un réseau interne qui constitue le noyau central.
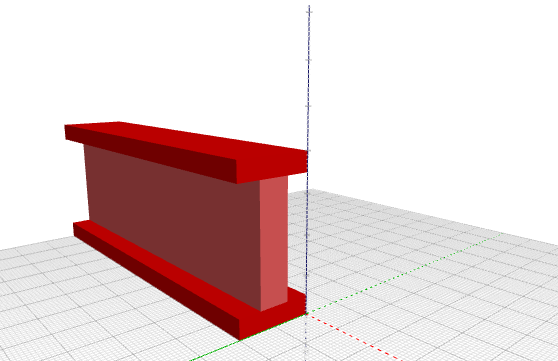
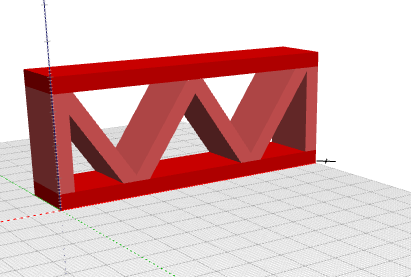
Des poutres étaient aussi mises en place transversalement pour stabiliser et rigidifier l’ensemble.
Les poutres qui soutiennent les planchers étaient des poutres treillis reliées d’un côté à une façade, et de l’autre, au centre de la tour.
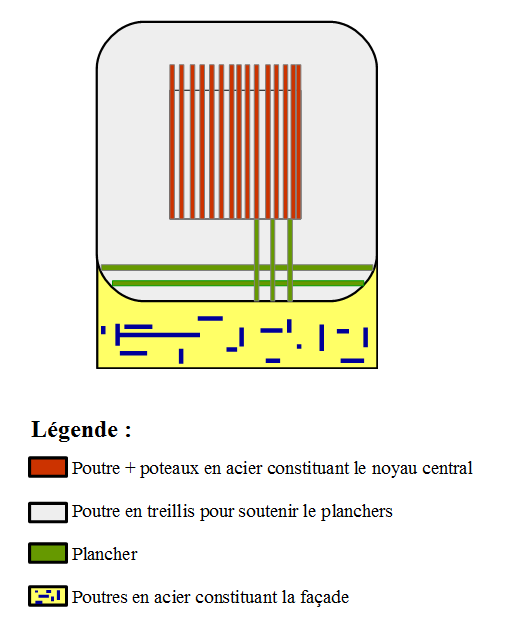
Source : LP2i. De manière simple, vous pouvez visiter une autre image en cliquant sur ce lien ( Source : twintowerstpedot.wordpress.com )
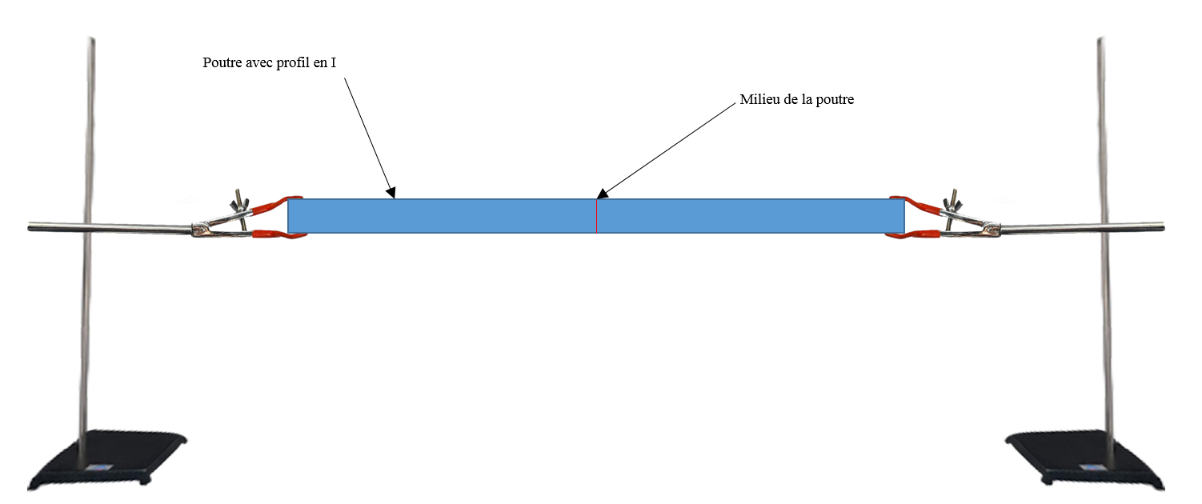
B – Expérimentation
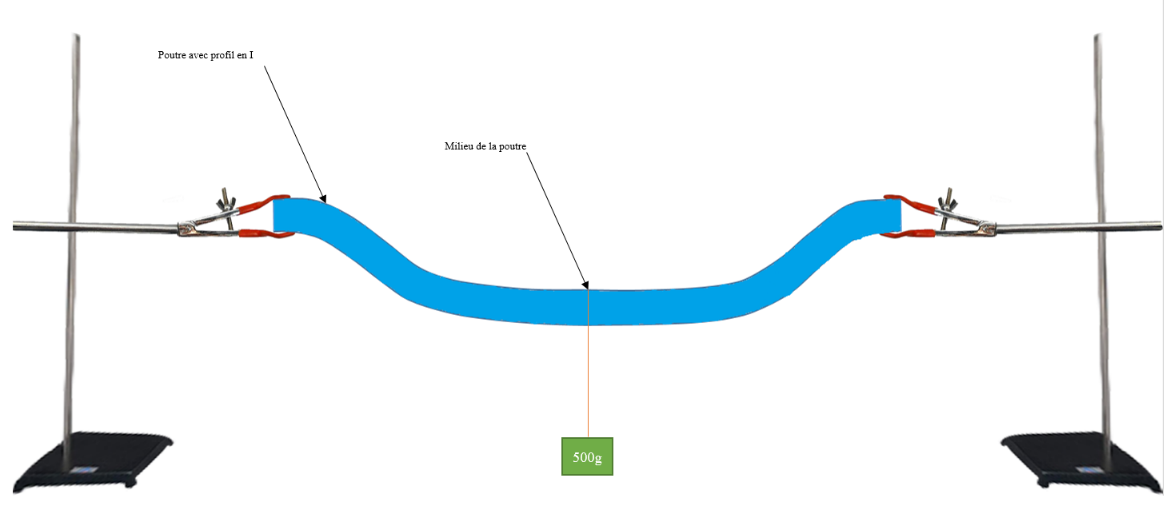
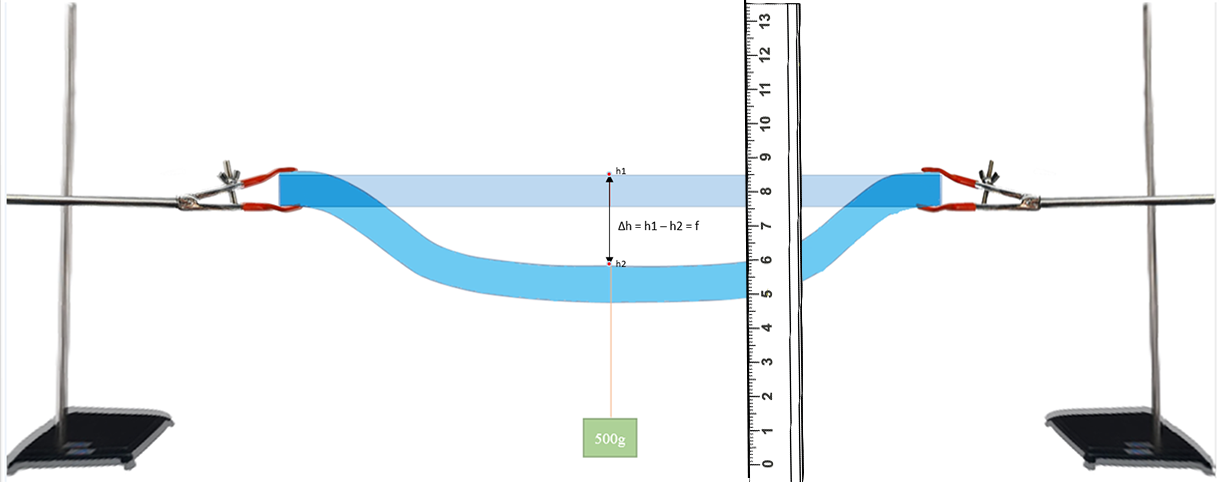
Avec notre expérimentation, nous avons déduis la force exercée par un objet pesant 500 g, sur une poutre en bois.

Source : LP2i
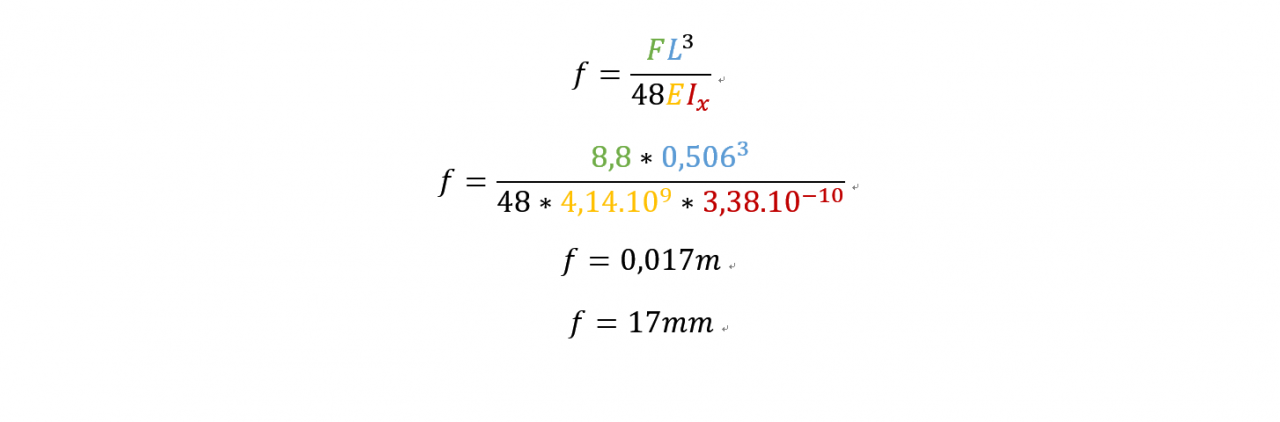
Par estimation, en mesurant la flèche, on obtient 90 mm pour une poutre d’un mètre de long. Dans un cas général, nous déduisons numériquement la charge unitaire :
Données :
$ b = 15 \: mm $ : “base de la poutre” ( en m )
$ h = L = 1 \: m $ : “hauteur ou longueur de la poutre” ( en m )
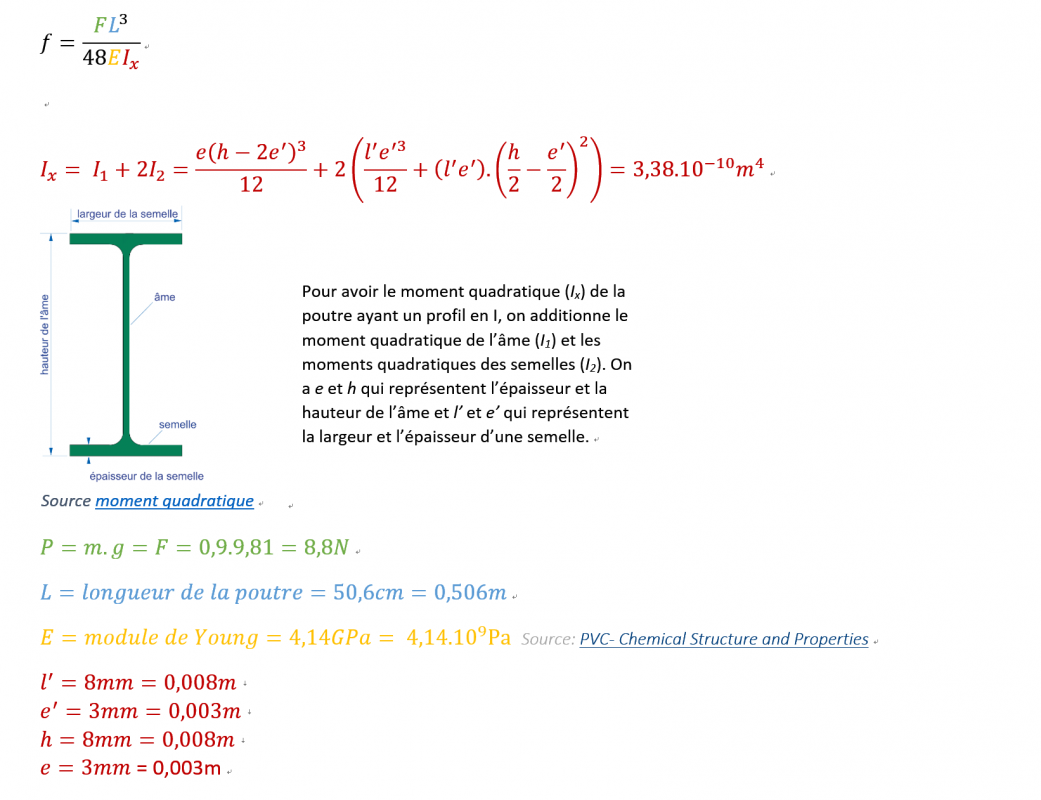
$ I_G = \frac{b \cdot h \cdot ( b^2 + h^2 )}{12} \iff I_G = 12.5 \: dm^{4} $ : “moment quadratique de la poutre” ( en m4 )
$ E = 10 \: GPa $ : “pression” ( en Pa )
$ f = 90 \: mm $ : “flèche” ( en m )
$ p = ? $ : “charge unitaire” ( en N·m-1 )
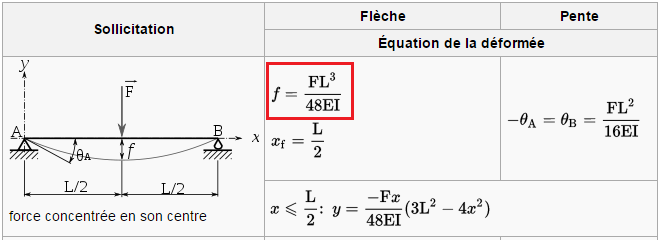
\[
f = \frac{5 \: p \: L^{4}}{384 \: E \: I_G } \iff \: p = \frac{384 \: E \: I_G \: f}{ 5 \: L^{4} } \iff p = 86 \: 419 \: 440 \: N \cdot m^{-1}
\].
La charge unitaire est donc de 86 MN/m.
C’est pour cela que le concepteur a choisi de mettre plusieurs planchers ( Voir 2 partie A en une image ) pour que la charge unitaire et la flèche soit approximativement nulle.
3/ Destruction des deux tours
A – Lors de l’attentat du 11 septembre 2001
Le premier impact est celui de la Tour du Nord à 8h46, tandis que le deuxième impact est celui de la Tour du Sud à partir de 9h02. Il a fallu 102 minutes pour qu’il y ait un flambage de la Tour du Nord, et 56 minutes pour la Tour du Sud. Ce flambage provient de la flexion d’un poteau en acier, qui est passé de l’état solide à l’état liquide.
Pendant leurs impacts, à l’intérieur des deux tours, les températures ont atteint 1000°C ( maximum ) et les différents aciers ont pu atteindre les 700-800°C. Pour prendre un exemple avec l’eau, elle peut passer de l’état solide à l’état liquide lorsque la température est supérieure à 0°C ( jusqu’à 100°C ). D’une manière générale, on dit qu’elle est flexible comme une règle Maped mais verticalement.
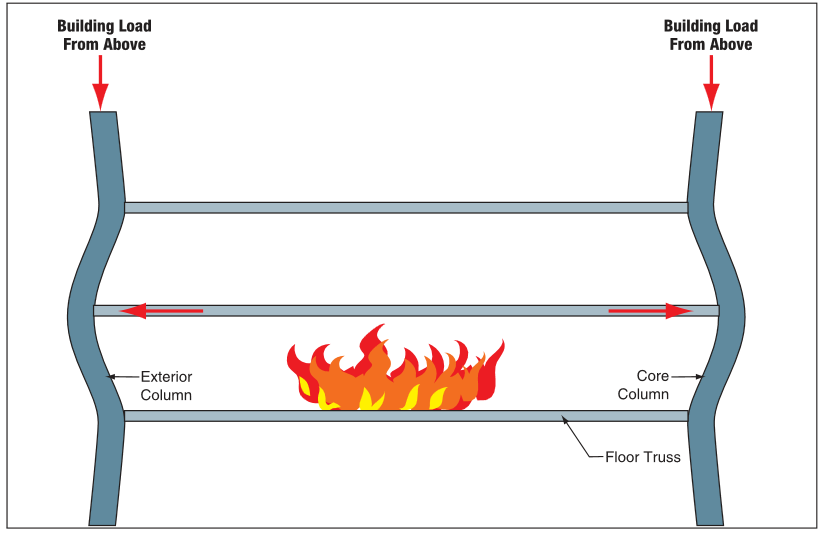
La colonne ( en acier ) déformée avec l’incendie ( à l’intérieur de la World Trade Center ); Source : FEMA, Chapitre 2, 2002
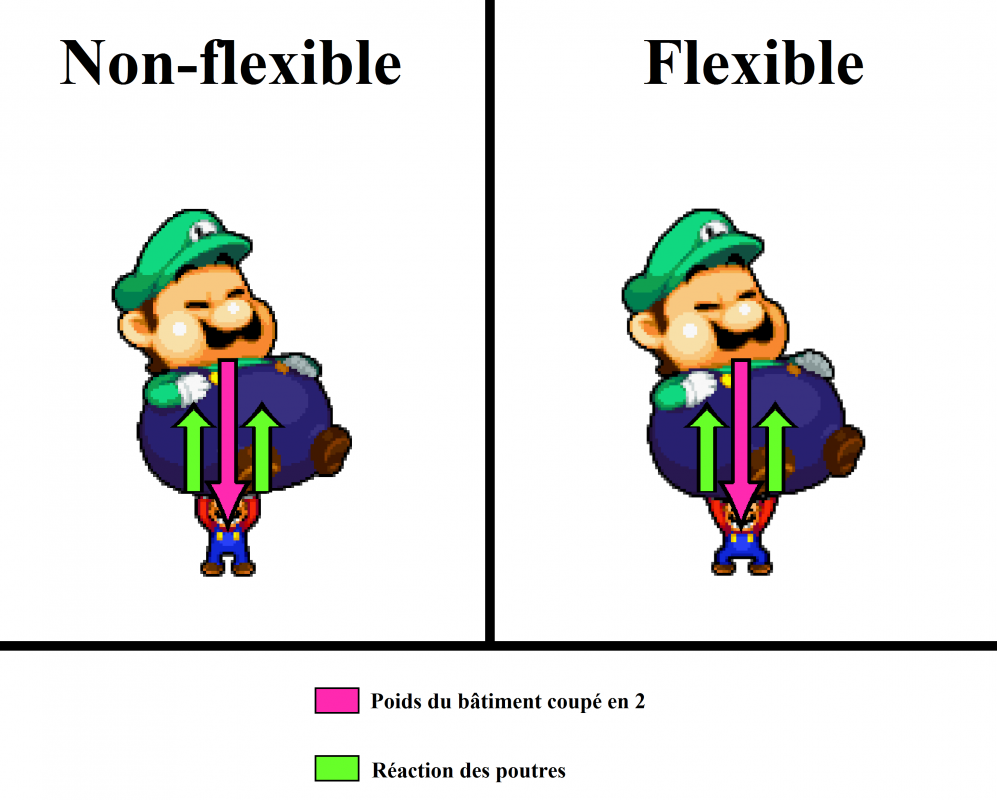
En une autre image, on peut constater qu’une fois que l’avion est rentrée en s’autodétruisant, il faut que les poutres non-coupées tiennent n fois plus que les poutres coupées ( Exemple sur la Tour du Nord coupée par le premier avion ) :

Pendant les attentats du 11 septembre. Source : Slate.fr
B – Exemple avec Mario portant Luigi
( en cours… )
Source ( pour les images prises ) : spriters-resource.com
Pour cela, il faut que Mario se tienne debout pour une longue durée comme pour la Tour Eiffel.
On note :
$ \overrightarrow{P} $ : le poids de Luigi ( légendé schématiquement en rose )
$\overrightarrow{R_{muscle}}$ : la force tenue par Mario ( légendé schématiquement en vert )
$\overrightarrow{R_{left}}$ : Bras gauche de Mario
$\overrightarrow{R_{right}}$ : Bras droit de Mario
$ \overrightarrow{R} = \overrightarrow{R_{left}} + \overrightarrow{R_{right}} $
Si on veut que les poutres soient équilibrés, en 2 équations, on a :
$ \overrightarrow{R_{left}} = \overrightarrow{R_{right}} = \frac{1}{2} \overrightarrow{P} $
Si : $ \sum \overrightarrow{F_{i}} \neq \overrightarrow{0} $ , alors Mario risquera de se faire aplatir. Notamment, le bâtiment risquera de se flamber.
Si : $ \sum \overrightarrow{F_{i}} = \overrightarrow{0} $ , alors Mario tiendra toujours debout. Le bâtiment reste solide et fixe.
C – Calculs de la vitesse d’effondrement lors du flambage des deux tours
Lors du flambage, en déterminant physiquement la vitesse d’effondrement, nous appliquons les 3 formules particulières afin d’en déduire les résultats trouvés.
Données :
$ d_1 = 526.6 \: m $ : Hauteur de la Tour du Nord ( avec l’antenne )
$ d_2 = 415.3 \: m $ : Hauteur de la Tour du Sud
$\overrightarrow{g} = 9.81 \: m \cdot s^{-2} $ : Accélération de la pesanteur
$ m = 485 \: kt $ : Masse des deux tours jumelles
Déterminons le temps nécessaire pour que les deux tours s’effondre en allant de leur hauteur jusqu’au sol :
\[
t_{WTC North} = \sqrt{ \frac{2 d_1}{ \overrightarrow{g} } } \iff \: t_{WTC North} = 10.36 s
\].
\[
t_{WTC South} = \sqrt{ \frac{2 d_2}{ \overrightarrow{g} } } \iff \: t_{WTC South} = 9.2 s
\].
Calculons la vitesse d’effondrement :
\[
v_{WTC North} = \overrightarrow{g} \times t_{WTC North} \\ \iff \: v_{WTC North} = 101 m \cdot s^{-1} \: \iff \: v_{WTC North} = 365 \: km \cdot h^{-1}
\].
\[
v_{WTC South} = \overrightarrow{g} \times t_{WTC South} \\ \iff \: v_{WTC South} = 90 m \cdot s^{-1} \: \iff \: v_{WTC South} = 324 \: km \cdot h^{-1}
\].
Une fois que la vitesse d’effondrement est déduite, nous calculons l’énergie cinétique :
\[
W_{WTC North} = 2^{-1} m \cdot {v_{WTC North}}^2 \\ \iff \: W_{WTC North} = 2.505 \: TJ
\].
\[
W_{WTC South} = 2^{-1} m \cdot {v_{WTC South}}^2 \\ \iff \: W_{WTC South} = 1.975 \: TJ
\].
En sachant qu’avec l’énergie dégagée par la destruction des deux tours, c’est presque équivalent à une masse allant de 472 à 598 tonnes de TNT.
Par estimation, certains habitants ont déterminé réellement ( sans précision ) le temps d’effondrement jusqu’au sol, approximativement 11.5 s ( pour la Tour du Sud ) & 12.6 s ( pour la Tour du Nord ). C’est la réaction du reste de la tour qui a permis de tenir le fragment du bâtiment ( qui est coupé en 2 ). C’est pour cela qu’on a pris un exemple avec Mario portant Luigi.
4/ Conçu pour le développement durable après les attentats du 11 septembre ?
| Avantages | Inconvénients |
| – Recyclage de l’acier
– La structure porteuse a résisté pendant 100 minutes avant que l’acier soit fondu |
– Coût des dégâts très élevé pour l’état, la ville & la société
– Structure porteuse non-convenable – Beaucoup de matériaux nocifs ( ex : Amiante ) – Beaucoup de personnes gravement malade ( poussières toxiques + incendie ) – Coefficient de sécurité trop important ( s > 2.5 ) |
5/ Conclusion
– La WTC s’est effondrée et a causé des dégâts très importants accompagnés de matériaux nocifs ainsi qu’un nuage de poussière toxique. La conception du bâtiment n’a pas pu respectée la contrainte sur la sécurité ( c’est-à-dire la solidité du bâtiment ). Mais si on protège l’acier avec du béton, elle aura un avantage sur la sécurité mais un inconvénient pour l’environnement ( impact sur l’environnement ).
– La structure porteuse doit être présenté autrement car il y a des risques de flambages ( voir 2 partie A ).
 (source:http://architopik.lemoniteur.fr/index.php/realisation-architecture/centre_aquatique_des_hauts_de_bayonne/4629)
(source:http://architopik.lemoniteur.fr/index.php/realisation-architecture/centre_aquatique_des_hauts_de_bayonne/4629)

























{kind=link}