
Compte rendu équipe 9
Introduction
Problématique : Comment concevoir et réaliser, de manière rapide, simple, et efficace, un robot répondant à un cahier des charges spécifique ?
Pour notre étude 3 (Mini-projet robotique) nous avons décidé de créer un robot capable d’attirer l’attention des spectateurs. En effet, celui-ci interagit avec le publique en provoquant un effet de surprise.
Sommaire
1 – Conception du robot
A/ Cahier des charges
B/ Chaîne d’information et d’énergie
C/ Algorithme
D/ Schéma électrique
2 – Programmation
A/ Exercices d’entraînements Blockly Arduino
3 – Construction du robot
A/ Assemblage
B/ Câblage
4 – Conclusion
1 – Conception du robot
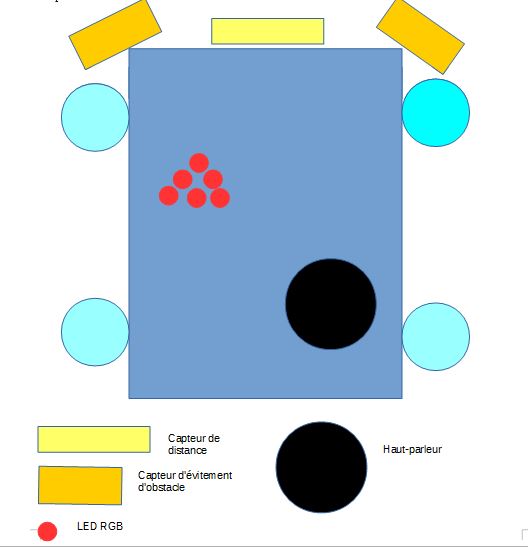
A/ Cahier des charges
B/ Chaîne d’information et d’énergie 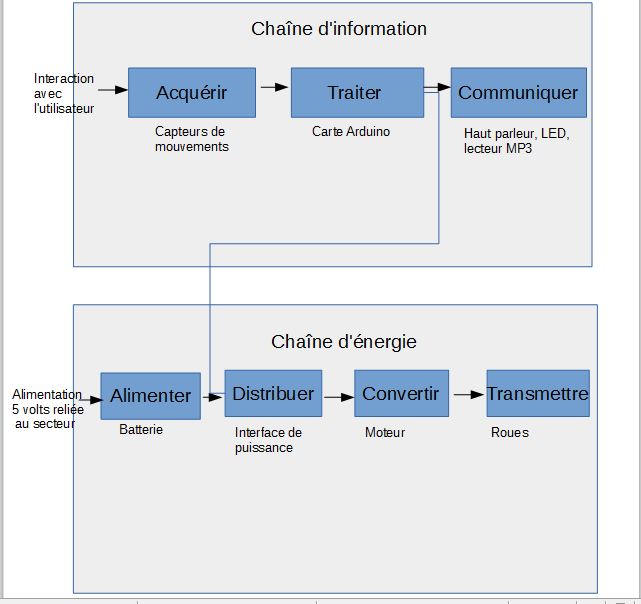
C/ Algorithme
Initialisation
Attendre 5 secondes
Fixer “Pin LED” sur le port digital n°6
Fixer “Pin Rx Lecteur MP3” sur le port digital n°11
Fixer “Pin BusyLecteur MP3” sur le port digital n°12
Lire variable “Distance 2” sur le port numérique n°5
Lire variable “Distance 3” sur le port numérique n°9
Lire Variable “Distance” sur le port analogique n°1
Répéter indéfiniment
Lire fichier audio Bonjour
Si distance_A > 600 :
Lire fichier audio Attention
Exécuter fonction “Cligno LED”
Exécuter fonction “Mouvement”
Fin répéter
Fonction “Cligno LED” :
Répéter pendant 5 s
Allumer LED
Attendre 250ms
Eteindre LED
Attendre 250ms
Fin répéter
Fonction “mouvement” :
Si (Distance_A > 500) ou (Distance_G > 500)
S’arrêter
Avancer vers la droite
Attendre 3 s
Sinon :
Avancer
Si Distance_D > 500 :
S’arrêter
Avancer vers la gauche
Attendre 3 s
Sinon :
Avancer
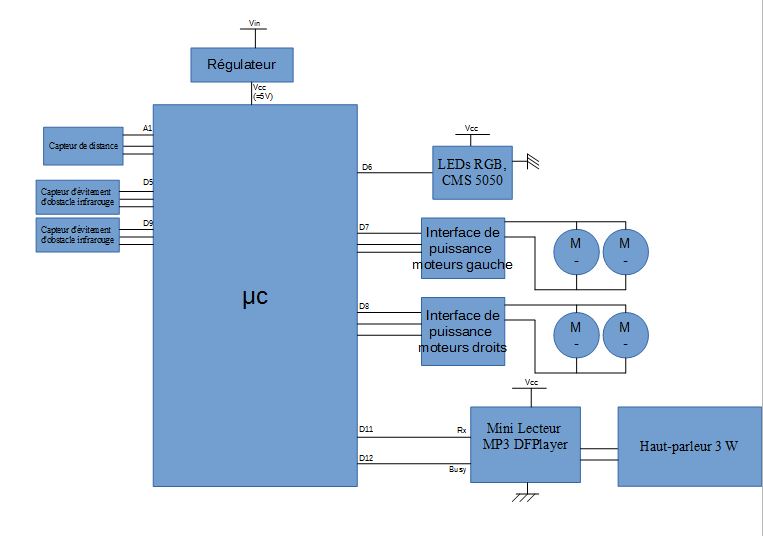
D/ Schéma électrique
2 – Programmation
A/ Exercices d’entraînements Blockly Arduino
Nous avons fait puis réutilisé les exercices blockly arduino. L’utilisation de ces briques logicielles nous à fait gagné du temps.
3 – Construction du robot
A/ Assemblage
Pour l’assemblage nous sommes partis d’une base roulante 4WD, cette brique matérielle nous à fait gagné ici aussi un temps précieux.
B/ Câblage
Pour le câblage nous avons soudé les moto-réducteur de la base roulante à des câbles qui permettent de se branché facilement sur l’interface de puissance.
4 – Conclusion
Pour répondre à notre problématique, l’utilisation de ces différentes briques et des ressources à notre disposition sont un bon moyen de concevoir et réaliser, de manière rapide, simple, et efficace, un robot.