
Analyse du Drone AR Parrot
1 Système choisi : AR Drone Parrot 1.0

Drone AR Parrot avec sa coque de protection

Drone AR Parrot avec sa coque simple
AR Drone Parrot (avec ses coques prévues pour l’extérieur/intérieur) (Source : LP2I)
Vidéo de présentation du drone : https://www.youtube.com/watch?v=RrWRVAqNgUQ
2 Analyse du besoin
2.1 Fonction globale
Ce drone est prévu pour voler en intérieur et en extérieur tout en enregistrant des images et en étant piloté via un smartphone avec une application gratuite, téléchargeable sur Android et iOS.
2.2 Fonctions de service et contrainte
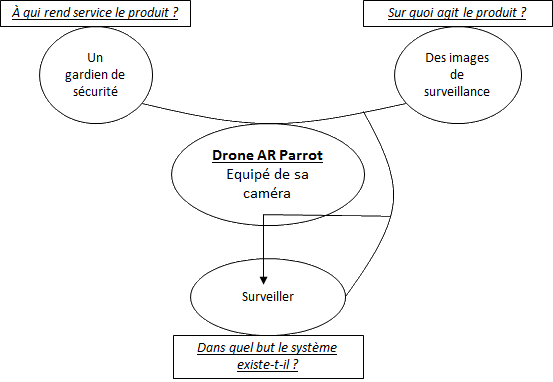
Diagramme bête a corne du drone AR Parrot.
Source : diagramme « bête à cornes »,LP2I
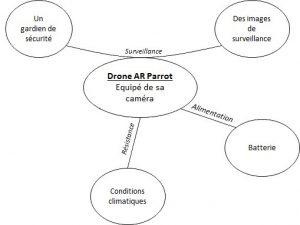
Diagramme pieuvre du drone AR Parrot.
Source : diagramme « pieuvre » LP2I
| Repère | Liste des fonctions de service et contraintes |
| Surveillance (FP) | Surveiller en direct via une caméra |
| Alimentation (FC1) | Etre alimenter par une batterie |
| Résistance (FC2) | Résister à l’environnement |
| Commande (FC3) | Etre télécommandable à longue distance |
3 Analyse du système
3.1 Fonctionnement, vu de l’utilisateur

Capture d’écran via AR.Freeflight sur Google Play Store

Capture d’écran via AR.Freeflight sur Google Play Store

Capture d’écran via AR.Freeflight sur Google Play Store
Source : Capture d’écran de l’application AR.Freeflight, Google Play Store
L’utilisateur télécharge l’application de pilotage AR.Freeflight du drone sur Internet s’il est déjà en possession d’un smartphone Android ou iOS. La connexion entre le drone et le smartphone s’effectue via une connexion Wi-Fi. Une fois la connexion effectuée, l’utilisateur voit en direct sur son smartphone ce que « voit » la caméra frontale du drone comme s’il était dans un cockpit. Le pilotage d’effectue grâce aux deux joysticks tactiles ci-dessus, l’un pour l’altitude l’autre pour la direction. Si la liaison Wi-Fi vient à se couper, le drone dispose d’un pilote automatique qui le posera en douceur. L’autonomie du drone est de 12 minutes environ pour un temps de charge de 1h30.
3.2 Matière d’œuvre et valeur ajoutée.
Le drone est équipé d’une caméra à grand angle (93°) de 640×480 pixels, qui lui permet de retransmettre en direct les images qu’elle « voit » sur le smartphone de l’utilisateur mais aussi d’enregistrer les images filmées ainsi que le lieu et la date de l’enregistrement.
4 Quelques fonctions techniques et solutions techniques
4.1 Interface de dialogue
– Fonction technique : Dialoguer avec l’utilisateur
– Solution technique : Retransmettre en direct les images que voit le drone sur le smartphone de l’utilisateur via une caméra et une connexion Wi-Fi.
4.2 Capteurs
– Fonction technique : Acquérir des informations sur l’altitude à laquelle se trouve le drone.
– Solutions techniques : Altimètre à ultrason (40 kHz)
4.3 Moteurs
– Fonction technique : Générer une action mécanique pour faire voler le drone.
– Solutions techniques : Quatre moteurs sans balai brushless (35 000 tr/min 15 W)
4.4 Alimentation
– Fonction technique : Alimenter en énergie électrique de manière autonome
– Solution technique : Batterie au Lithium-polymère (11,1 V, 1 000 mAh)
5 Analyse de l’altimètre à ultrason
Le drone peut calculer à quelle distance il se trouve du sol et retransmettre cette donnée en direct grâce à l’altimètre à ultrason. Il s’agit tout simplement d’un émetteur et d’un récepteur d’ondes ultrason, inaudibles à l’oreille humaine, situés sous le drone.

AR Drone Parrot avec sa coque de protection
Source : Wikipedia
Principe de fonctionnement du capteur
L’émetteur va emmètre des ondes ultrason qui vont mettre un certain temps à se réfléchir sur le sol et plus le drone est en altitude, plus les ondes vont mettre de temps à rebondir contre le sol et à revenir vers le récepteur. Le drone n’a plus qu’à calculer l’altitude du drone en fonction du temps qu’ont mis les ondes ultrasons à se réfléchir sur le sol. Ce calcul se faisant quasi-instantanément, du point de vu de l’utilisateur, c’est en direct.
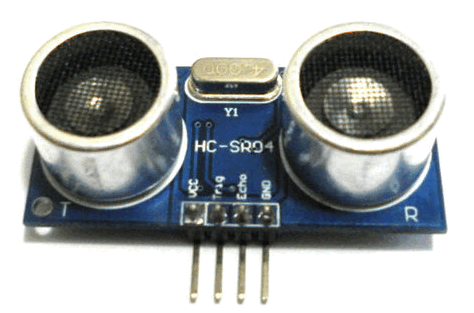
Photographie d’un émetteur/récepteur à ultrasons
Exemple d’émetteur/récepteur ultrasons, Source : ronan-chardonneau.fr
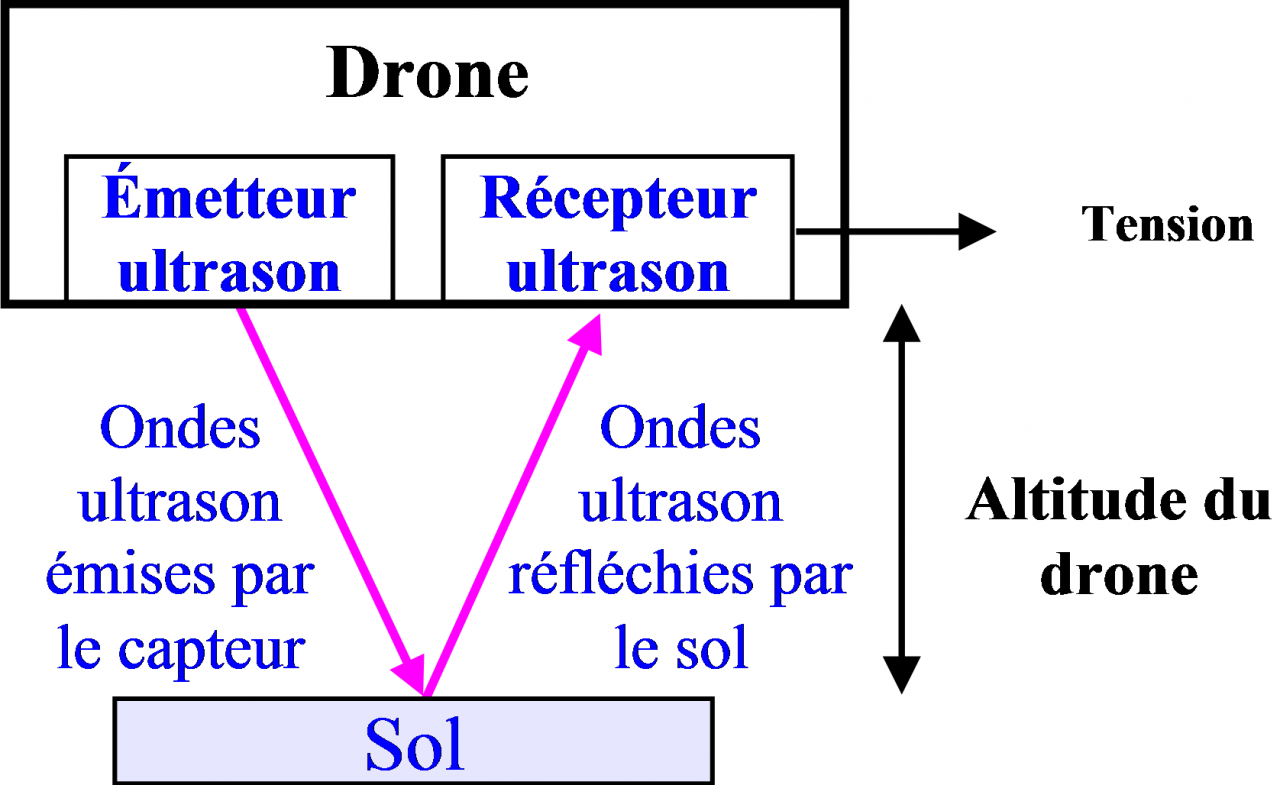
Schéma fonctionnel de l’émetteur/récepteur à ultrasons
Principe de fonctionnement d’un altimètre à ultrason (LP2I)
6 Impact environnemental
– Le drone consomme très peu d’énergie électrique car il fonctionne sur batterie
– Le drone est fabriqué principalement à partir de fibre de carbone et de polypropylène expansé qui sont des matériaux recyclables.
– Les pièces mécaniques du drone sont en plastique, issu du pétrole, une ressource en voie d’épuisement.
Félix.H et Quentin.D