Création du groupe, découverte du projet et de l’avancement des 1S2.
Mercredi 25 mars :
Réalisation d’une ébauche de schéma electrique. (photo à venir) – avancement du montage du robot, placement de la carte Arduino sur le bloc supérieur, placement du boitier de controle des piles.
Lundi 13 avril :
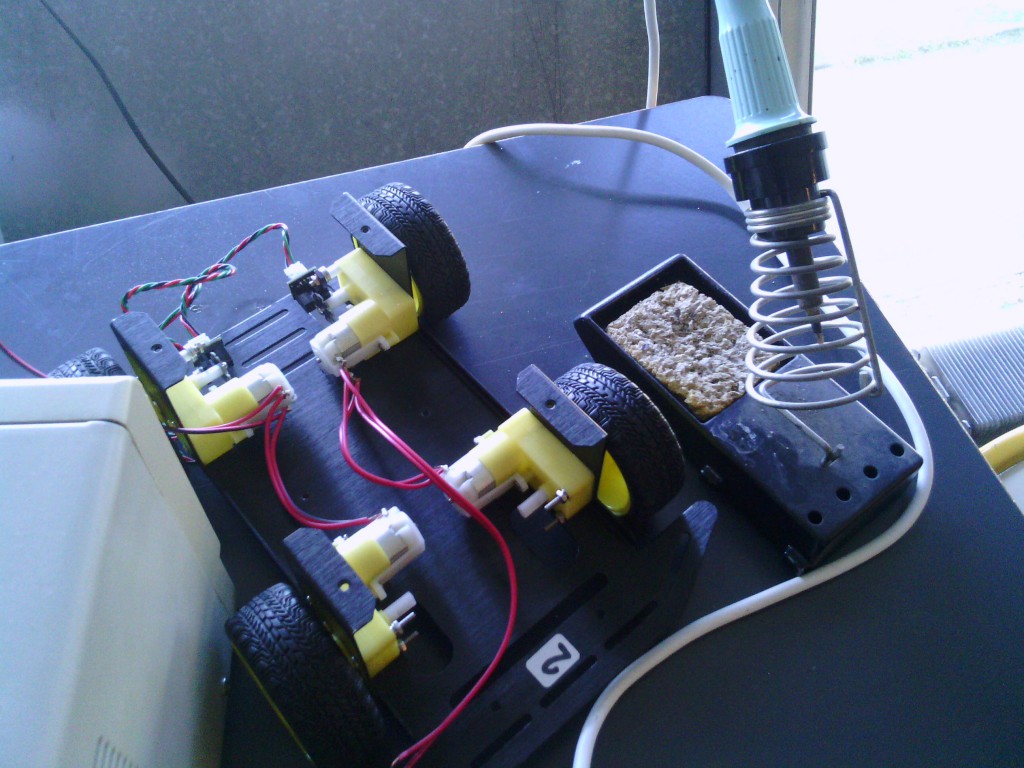
Soudure des fils
Robot et fer à souder
Mercredi 15 avril :
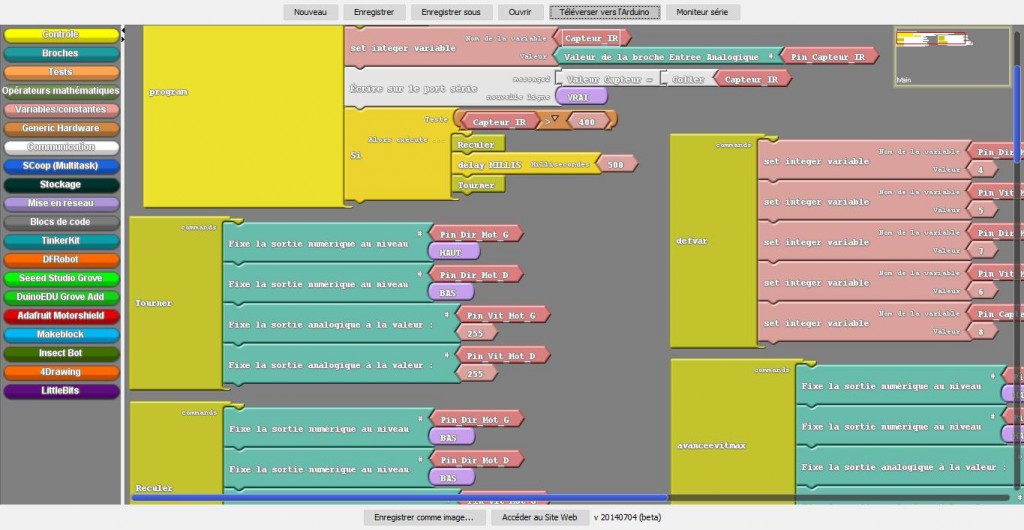
Après la détérioration du matériel par les 1ere S2, Nicolas a du ressouder les fils et recommencer le travail effectué le 13 avril sur le robot. Camille s’est occupé du programme sur Ardublock. Il a réussi à faire fonctionner le robot mis à disposition par le professeur et lui a ajouté des capteurs infrarouge pour faire en sorte que le robot change de direction avant de rentrer en collision avec un autre objet. Victor a appris à souder.
Analyse des critères permettant le fonctionnement de la nacelle gyrostabilisée
Problématique:
Comment concevoir un outil d’observation aérienne ?
Comment décrire le besoin, les contraintes, le fonctionnement, … pour un objet technique existant ?
Comment le besoin et les contraintes sont prises en compte dans la conception des solutions techniques ?
Le drone ou multicoptère à beaucoup d’avantages qui vont lui permettre de prendre de l’avance sur ses concurents par les prises de vues aériennes . Il a cependant quelques inconvénients comme tout appareil .
Un drone multicoptère avec caméra embarquée. Source : dronewithme.com
De part sa petite taille , le multicoptère est très maniable et très rapide pour la mise en oeuvre contrairement à d’autres appareils comme l’avion , l’hélicoptère ou même le paramoteur . De plus , cette qualité , aussi l’un de ses plus grands avantages , lui permet de voler en zone urbaine ou en intérieur en réduisant au maximum les risques.Tous ces avantages font que son coût horaire est très faible et qu’il est très respectueux de l’environnement de même que le ballon captif qui est aussi assez prisé pour les prises de vues aériennes.
Des limites et obligations
Malgré toutes ces qualités, ce petit appareil a également des défauts. Il volera moins haut et moins rapidement que les les appareils imposants. Son rayon d’action est lui aussi limité par rapport aux appareils de plus grande envergure même si celui-ci reste largement supérieur à celui du ballon. Enfin, son plus grand défaut reste l’autonomie, malgré tout compensé pas ses autres avantages.
AR Drone de Parrot acheté par le LP2I – Photo LP2I
Drone de prise vue aérienne
Autre type de véhicule
Maniabilité précise (marge d’erreur de 30cm)
Maniabilité difficile
Vol stationnaire possible
Vol stationnaire seulement pour un hélicoptère
Très faible d’autonomie
Très grande autonomie
Besoin du permis Drone
Besoin du permis avion ou hélicoptère
Sensibilité au vent élevée (supérieur a 40km/h)
Sensible seulement au vent fort
Ne peut voler que en zone autorisée
Peut voler partout (>150m)
Prix bas pour un professionnel
Prix vraiment très élevé
Le drone doit être résistant ; il doit embarquer une nacelle gyrostabilisée pour palier aux mouvements non désirés créés par le vent. La fonction principale de la nacelle est de pouvoir orienter et stabiliser l’appareil. Elle doit s’adapter en taille comme en poids à la nacelle. Elle doit aussi pouvoir supporter le poids et la taille de l’appareil photo. Enfin, elle doit être alimentée en énergie, ne pas nuire à l’environnement et être facilement pilotable par l’utilisateur.Pour répondre a cette fonction technique, une télécommande a été réalisée, qui permet de commander le multicoptère. Elle fonctionne à l’infrarouge, et la portée de la télécommande essaye d’être poussée au maximum. Les ingénieurs ont utilisé un moteur éléctrique pour répondre aux problèmes d’environnement et de volume sonore.