Introduction :
Dans cette période d’étude de groupe, nous avons suivi les consignes indiquées et choisi de travailler sur un robot qui, en la présence d’une personne dans la pièce, l’interpelle, et lui dit d’avancer ou de reculer en fonction de son éloignement avec le robot. De plus, une LED s’allumera et une danse avec un bonhomme débutera, rythmé avec des musiques différentes. Pour qu’on puisse atteindre cet objectif, on a conçu un robot qui correspond au cahier de charges et à la chaîne fonctionnelle.
Problématique : Comment concevoir et réaliser, de manière rapide, simple, et efficace, un robot répondant à un cahier de charges spécifique ?
Sommaire :
Ⅰ. Le cahier de charges
Ⅱ. La chaîne fonctionnelle
Ⅲ. La liste de matériel
Ⅳ. La conception
Ⅴ. La programmation
Ⅵ. Le module MP3
Ⅶ. La justification de solutions techniques choisi
Ⅷ. La conclusion
I. Le cahier des charges :
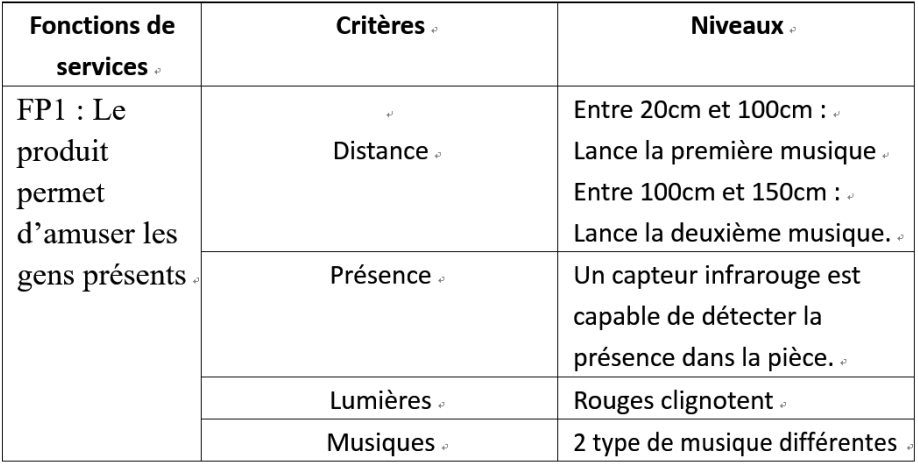
Source : LP2I
II. La chaîne fonctionnelle
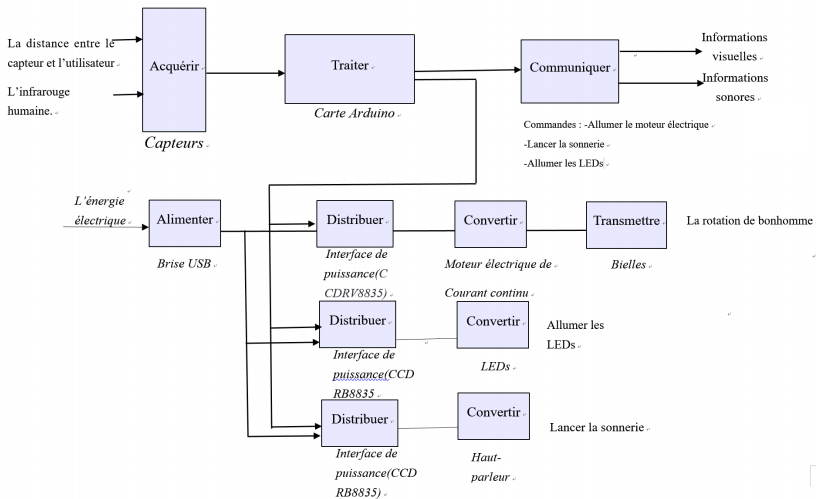
Source : LP2I
III. La liste de matériel
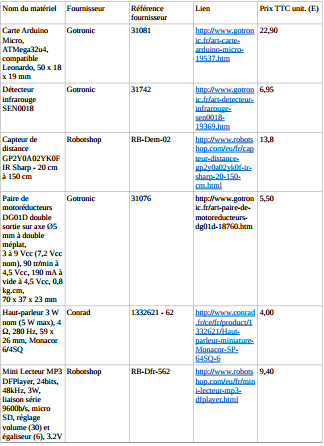
Source : LP2I
IV. La conception
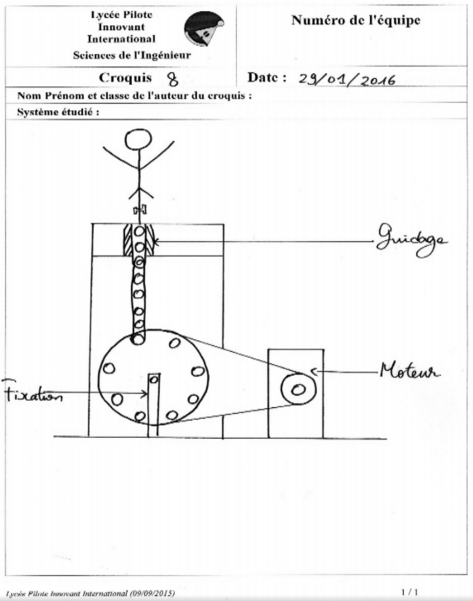
Source : LP2I
Au tout début, on a conçu un robot danseur de la OLA avec pleins de bonhommes qui montent et descendent en utilisant une transmission à chenille-
engrenage.
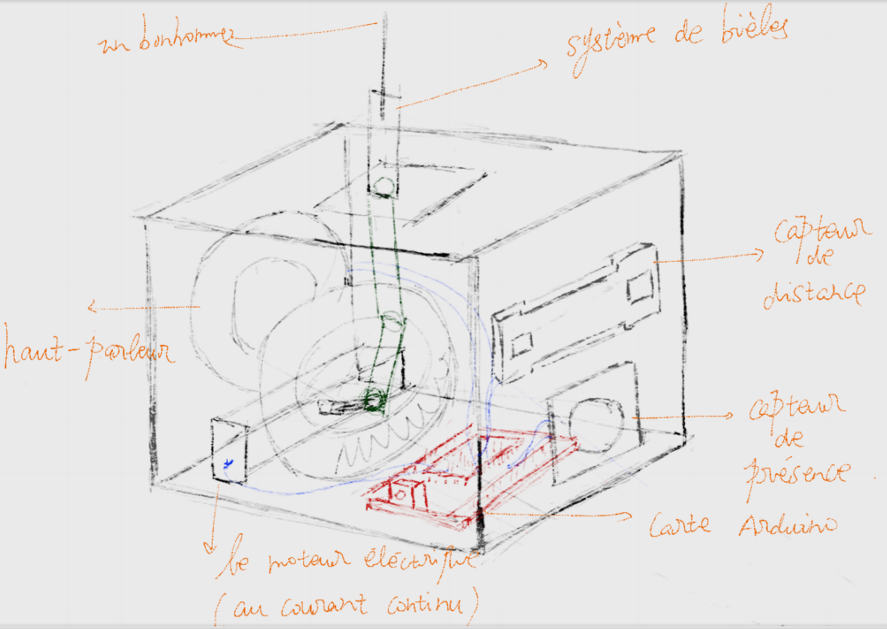
Source : LP2I
Nous nous sommes rendu compte qu’il n’était pas simple de réaliser tous ces mouvements à la fois alors que nous avons choisi enfin de produire un robot surprenant avec un seul bonhomme qui monte et descend commandé par une carte Arduino.
Afin de gagner du temps, nous allons utiliser les pièces mécaniques présentes dans les boîtes mécano pour éviter d’avoir à les créer avec l’imprimante 3D.
V. La programmation
A) Programmer rapidement et facilement
En ce qui concerne la programmation du robot, il faut utiliser des logiciels permettant de programmer rapidement et simplement. Nous avons au début utilisé ardublock, pour ensuite utiliser blockly arduino. Pour créer notre programme, nous avons combiné plusieurs programmes simples, comme par exemple :
– Un programme permettant de lire une information et d’utiliser la fonction if/else :
Source : LP2I
Source : LP2I
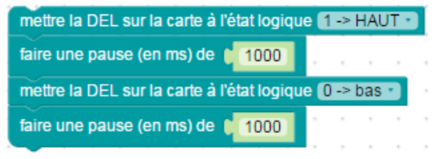
– Un programme permettant de faire clignoter une LED :
Le fait d’utiliser des mini-programmes déjà créés nous permet de gagner du temps et de ne pas avoir à les faire nous-mêmes.
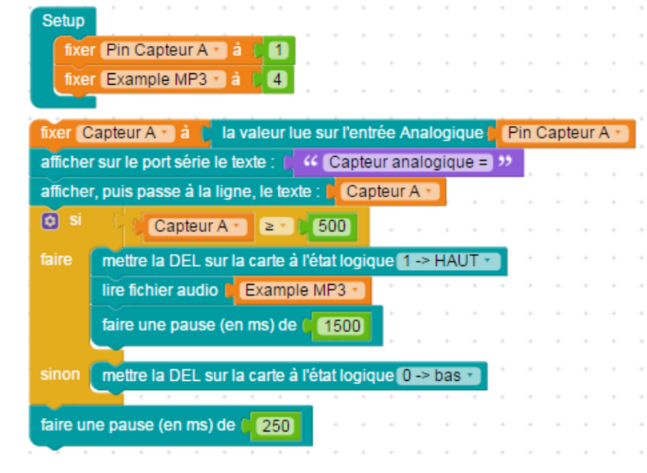
B) L’avancement de notre programme

Source : LP2I
VI. Le module MP3
En ce qui concerne la gestion du son, nous avons a choisi le module audio mp3 DFPlayer Mini mp3 de DFRobot (lien)
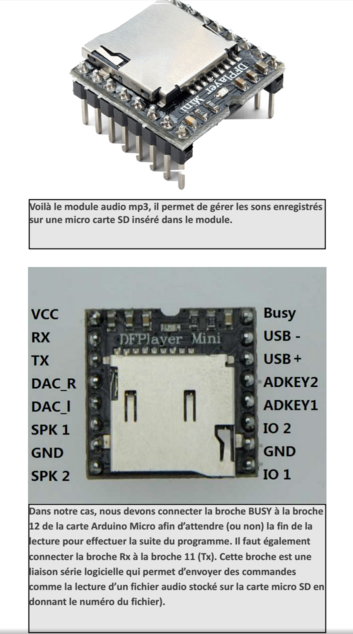
Source : DFRobot et LP2i
Pour brancher ce module, nous n’avons besoin que de seulement 6 fils ; 1 pour l’alimentation (Vcc), 1 relié à la masse (GND), 1 pour envoyer les informations (Rx), 1 pour informer si le lecteur est occupé ou non (Busy) et 2 (SPK 1 et SPK 2) connectés au haut-parleur.
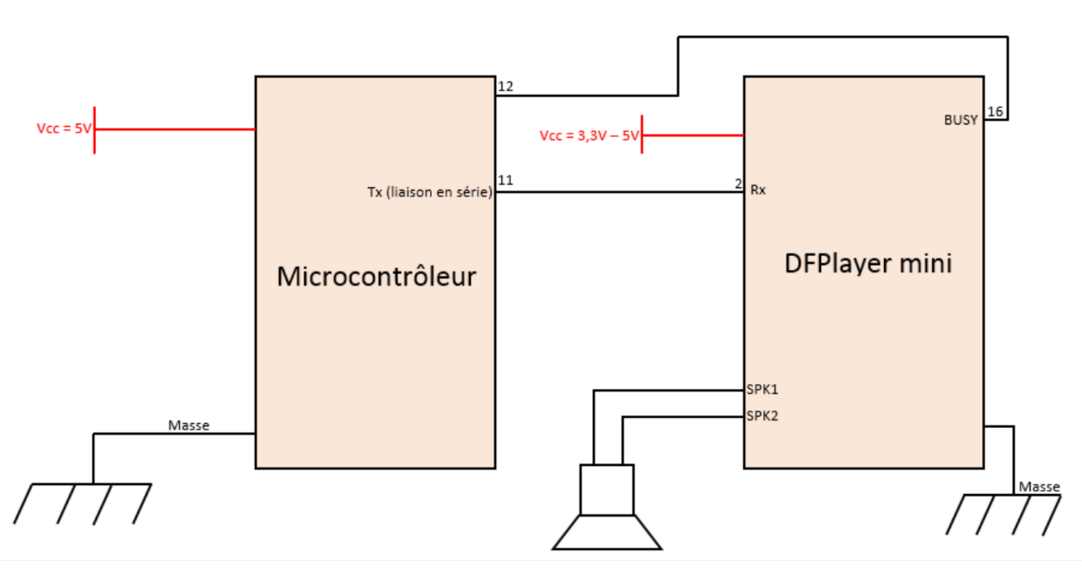
Source : LP2I
Les blocs utilisés pour programmer le module audio mp3 sont ceux-là :
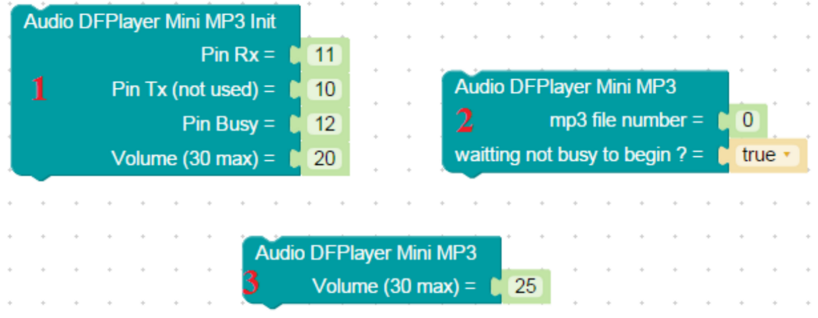
Source : LP2I
Le bloc 1 nous permet d’initialiser le module, de dire au programme sur quelles broches (Rx et Busy) est-il branché ainsi que le volume de référence. Le bloc 2 nous permet de lancer la lecture d’un fichier audio et de dire s’il faut attendre la fin de la lecture pour effectuer la suite du programme. Le bloc 3 nous permet de changer le volume du haut-parleur.
VII. Le schéma électrique de notre robot
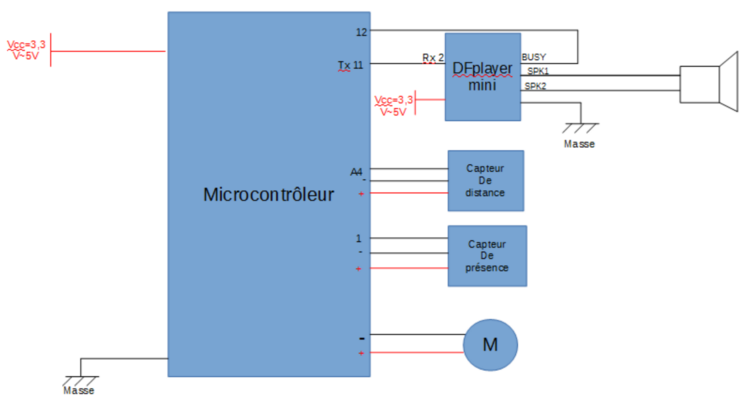
Source : LP2I
VIII. La justification des solutions techniques choisies
Solutions techniques choisies :
- Carte Arduino Micro, ATMega32u4, compatible Leonardo, 50 x 18 x 19 mm
Nous avons conçu un robot basé sur les programmes de la Carte Arduino donnée. Caractéristiques :
•Alimentation : via port USB ou 7 V à 12 V sur connecteur alim
•20 broches d’E/S dont 7 PWM et 12 entrées analogiques
- Détecteur infrarouge SEN0018
Comme inscrit dans le cahier de charges, nous avons besoin de détecter la présence pour démarrer le robot, nous avons donc pris un capteur infrarouge apte à détecter les personnes présentes devant le capteur.
- Capteur de distance GP2Y0A02YK0F IR Sharp – 20 cm à 150 cm
Nous avons choisi ce capteur de distance puisque nous avons conçu un robot qui effectue des actions en fonction de la distance mesurée et qui doit amuser les gens présents, pour cela, nous avons besoin d’un capteur de distance à grande portée, nous avons donc choisi un capteur de distance de 20 cm à 150 cm. Caractéristiques :
• Échelle de mesure de distance : de 20 à 150 cm
• Sortie de type analogique
• Consommation électrique : Type 33 mA
• Tension d’alimentation : de 4,5 à 5,5 V
- Paire de motoréducteurs DG01D double sortie sur axe Ø5 mm à double méplat, 3 à 9 Vcc (7,2 Vcc nom), 90 tr/min à 4,5 Vcc, 190 mA à vide à 4,5 Vcc, 0,8 kg.cm, 70 x 37 x 23 mm
Nous avons conçu un robot surprenant qui a un mouvement de rotation avec un système de bielle, nous avons forcément besoin d’une roue de rotation continue. Nous avons donc décidé de prendre ce modèle de moteur lequel nous pouvons régler la vitesse de rotation. Caractéristiques :
·Alimentation à prévoir: 3 à 9 Vcc (7,2 Vcc nominal)
·Vitesse à vide: 90 tours/min sous 4,5 Vcc
·Couple: 0,8 kg.cm
·Dimensions: 70 x 37 x 23 mm
- Haut-parleur 3 W nom (5 W max), 4 Ω, 280 Hz, 59 x 26 mm, Monacor 6/4SQ
Pour lancer la sonnerie, nous avons choisi un haut-parleur.
- Mini Lecteur MP3 DFPlayer, 24bits, 48kHz, 3W, liaison série 9600b/s, micro SD, réglage volume (30) et égaliseur (6), 3.2V à 5V, 20×20 m
Nous avons choisi un mini lecteur MP3 avec une carte de mémoire SD 8G et ce lecteur permet d’enregistrer et lire les fichiers MP3.
- DRV8835 Dual Motor Driver Carrier (2 x 1,2A @ 2 à 11V, H bridge)
Nous avons choisi un moteur de courant continu qui fonctionne sous 3V à 7V et pour que le moteur fonctionne, nous avons donc pris une interface de puissance qui permet de contrôler le moteur en signal logique.
VII.Conclusion
Dans cette période de travail en équipe, nous avons appris que pour concevoir et réaliser un robot rapidement et efficacement, nous pouvons utiliser de pièces relativement simple (mécano) ou réaliser des pièces de manière plutôt simple (Imprimante 3D Tobeca 2) et nous pouvons nous baser sur des plusieurs programmes simples créés notamment avec l’interface “Blockly Arduino”. Une bonne organisation a également été nécessaire pour les différentes étapes de la conception de ce robot.