Comment acquérir une information sur la position d’un contact ?
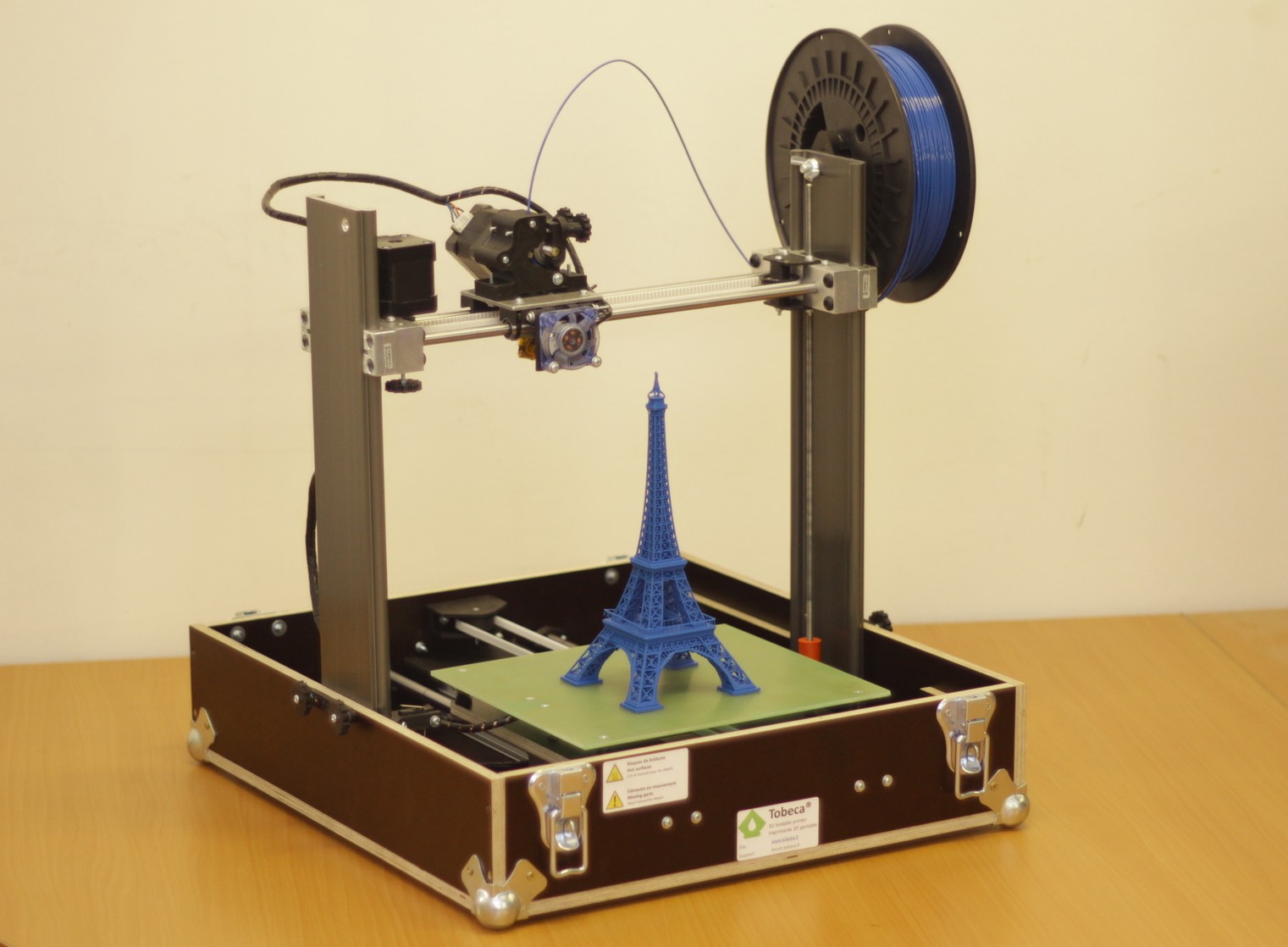
Dans le cadre d’un travail expérimentale sur l’imprimante 3D Tobeca 2 en sciences de l’ingénieur, nous avions pour objectif d’étudier un contact de fin de course sur l’imprimante.
Nous étions 2 par groupe et nous étions chargé de rédiger, par élève un compte-rendu sur un contact fin de course.
Pour des soucis de position et d’accessibilité, nous avons décidés d’étudier le capteur de position fin de course de l’axe Z.
Notre investigation s’est divisée en 3 parties principales :
Investigation sur l’imprimante en classe entière
Investigation par groupe de 2 sur un capteur FDC ( Fin De Course), relié à un multimètre
Investigation sur un capteur FDC relié à un circuit électrique et a un oscilloscope (par 2)
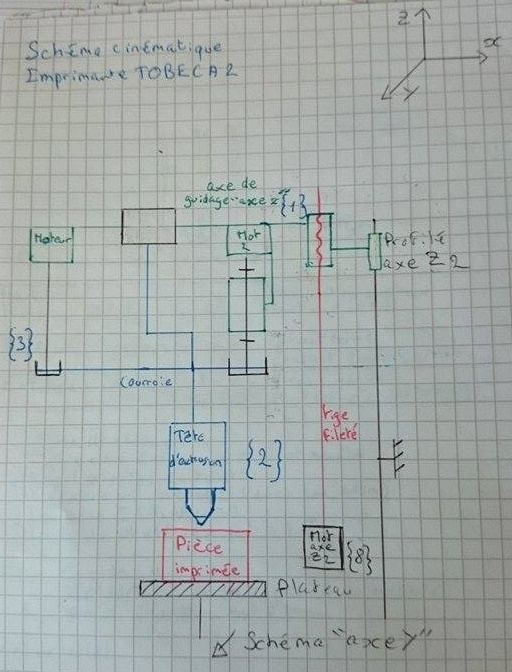
Schéma cinématique de l’imprimante 3D Tobeca 2
Lors de l’investigation en classe entière, nous avons étudié le comportement de l’imprimante en fonction de la position du contact FDC sur l’axe Z.
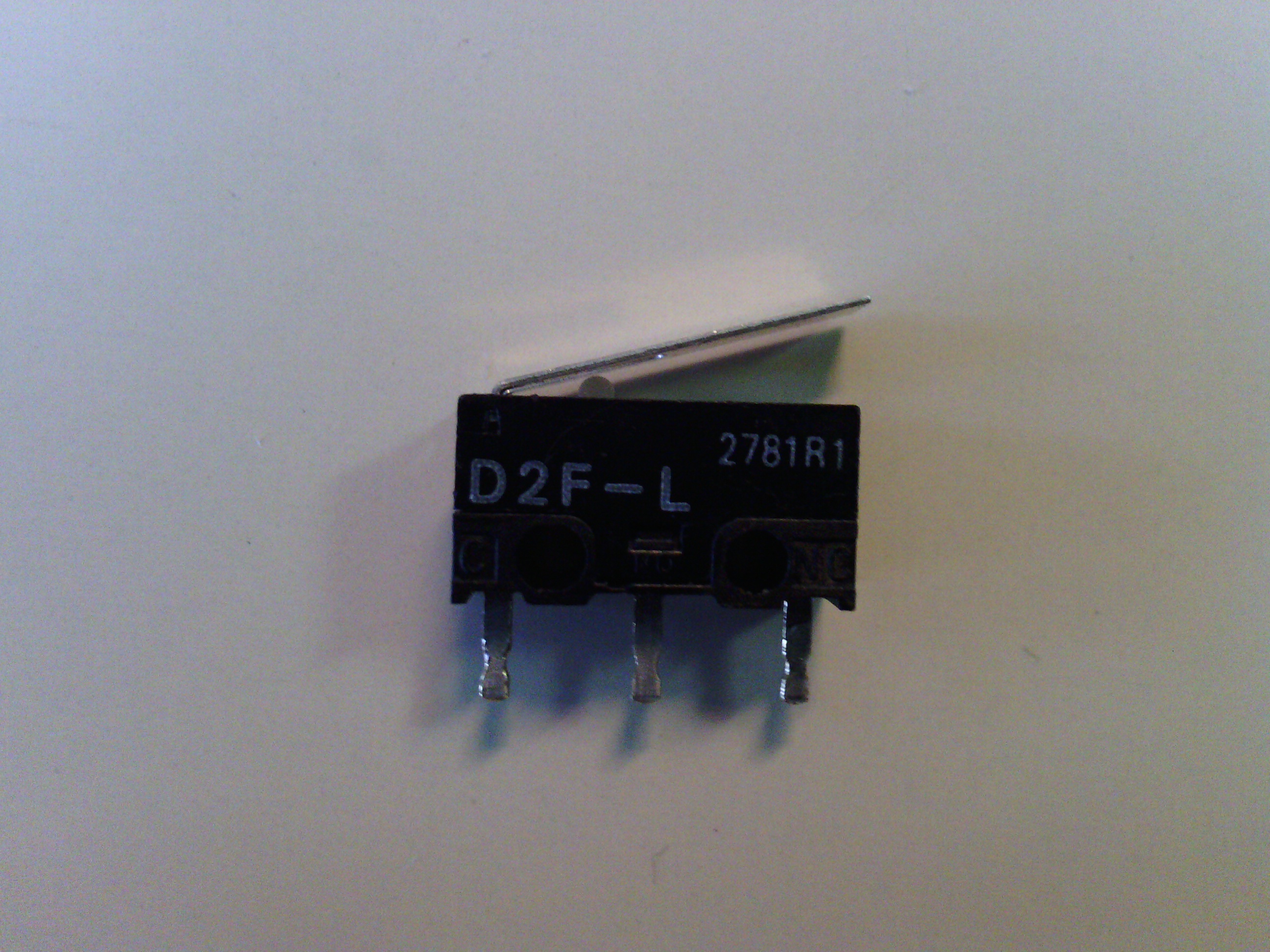
Nous avons par la suite étudié le capteur seul.
capteur
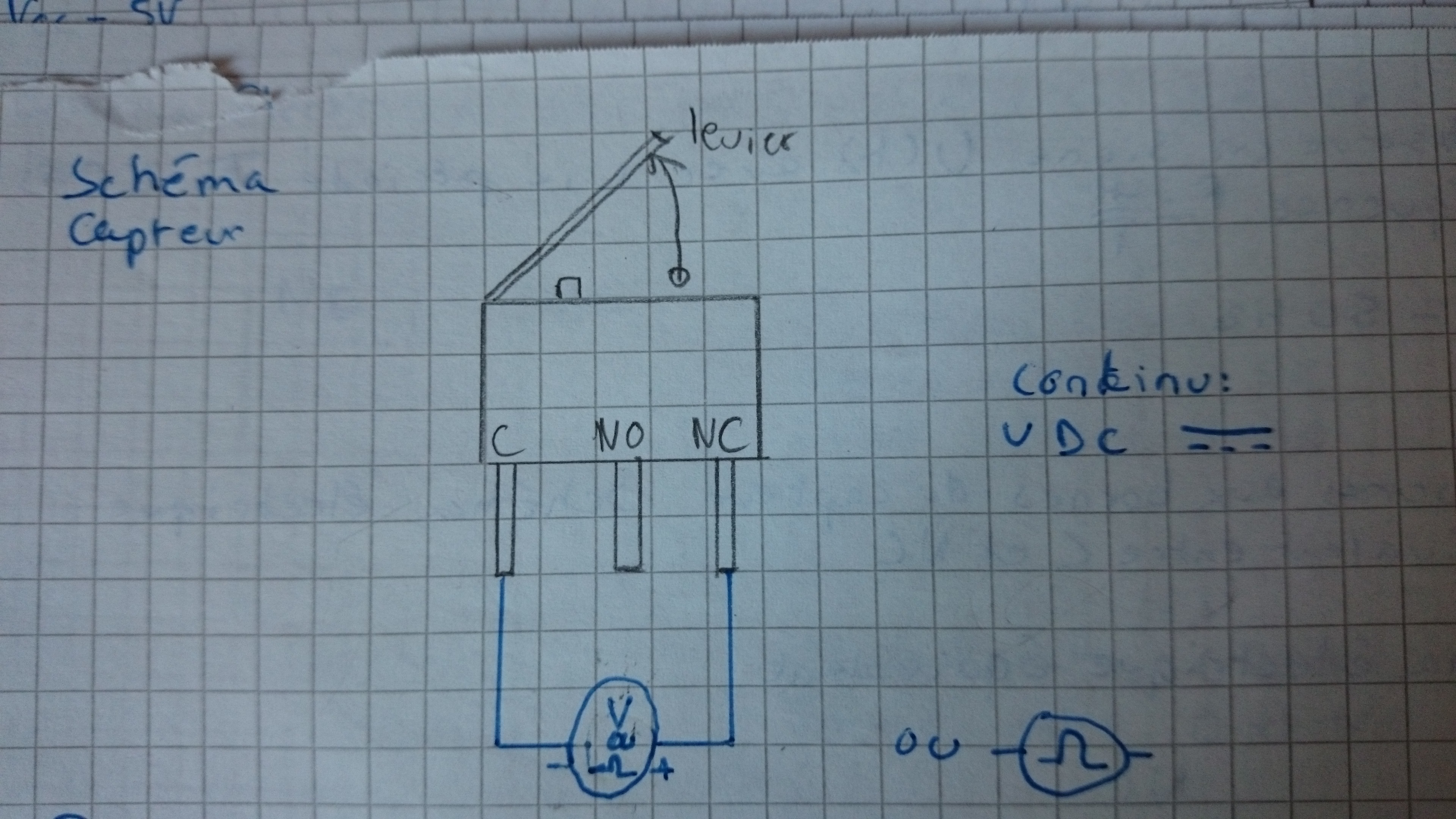
schéma capteur FDC
Lors de l’investigation par groupe de 2, avons étudier le contact avec un multimètre, que nous avons brancher aux bornes C et NC.
Position levier
R (Ω)
U (V)
Modélisation du capteur entre les bornes C et NC
Relâché
≈ 0
0
Circuit fermé
Contact fermé au repos
Enfoncé
O.L (OverLoad = dépassement de la capacité de mesure) R>99MΩ
Pas stable (en l’air)
Circuit ouvert
Contact ouvert en position travail
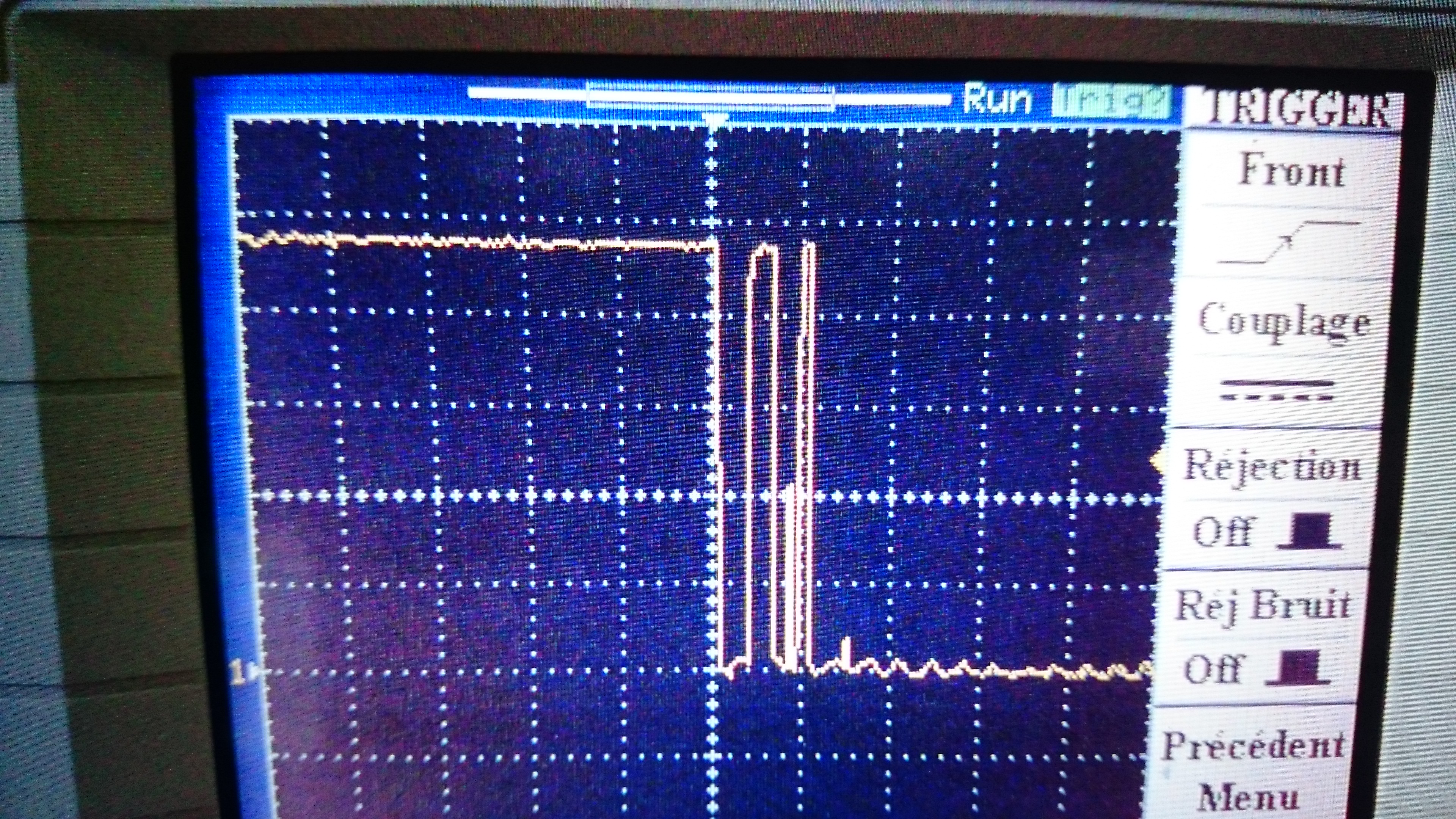
Enfin, nous avons relié le contact FDC avec un oscilloscope, toujours sur les bornes C et NC
lecture oscilloscope passant de l’état du levier de appuyé (position au travail) à relâché (position repos)
Sur l’oscilloscope, nous pouvons observer un certain rebond lors du changement d’état du levier. Cela s’explique notamment par la souplesse du matériaux. La carte électronique ne prend bien évidement compte avec le trigger (seuil de déclenchement), permettant ainsi que le programmation ne s’active pas plusieurs fois de suites.
État levier
U(V)
R(Ω)
État du contact, modélisation
Relâché
0
0
Contact fermé
Enfoncé
≈ 4,7
O.L. >99.9 MΩ
Contact ouvert
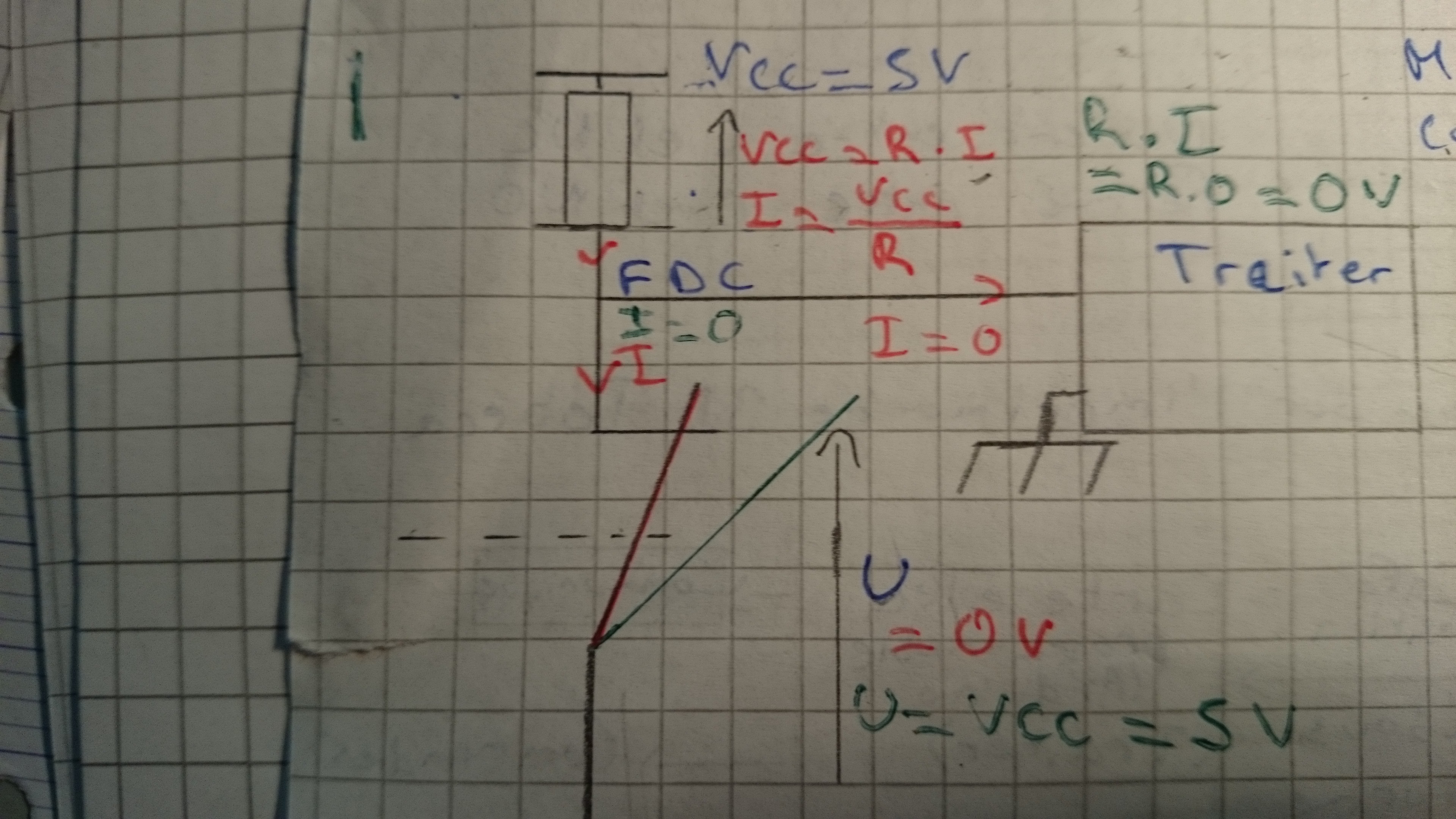
Modélisation du contact FDC
Nous pouvons constater que dans le circuit, nous avons mis une résistance, permettant ainsi de tirer le contact FDC au + permettant ainsi d’éviter un court-circuit.
Comment piloter précisément et efficacement les mouvements complexes d’un bras mécannique ?
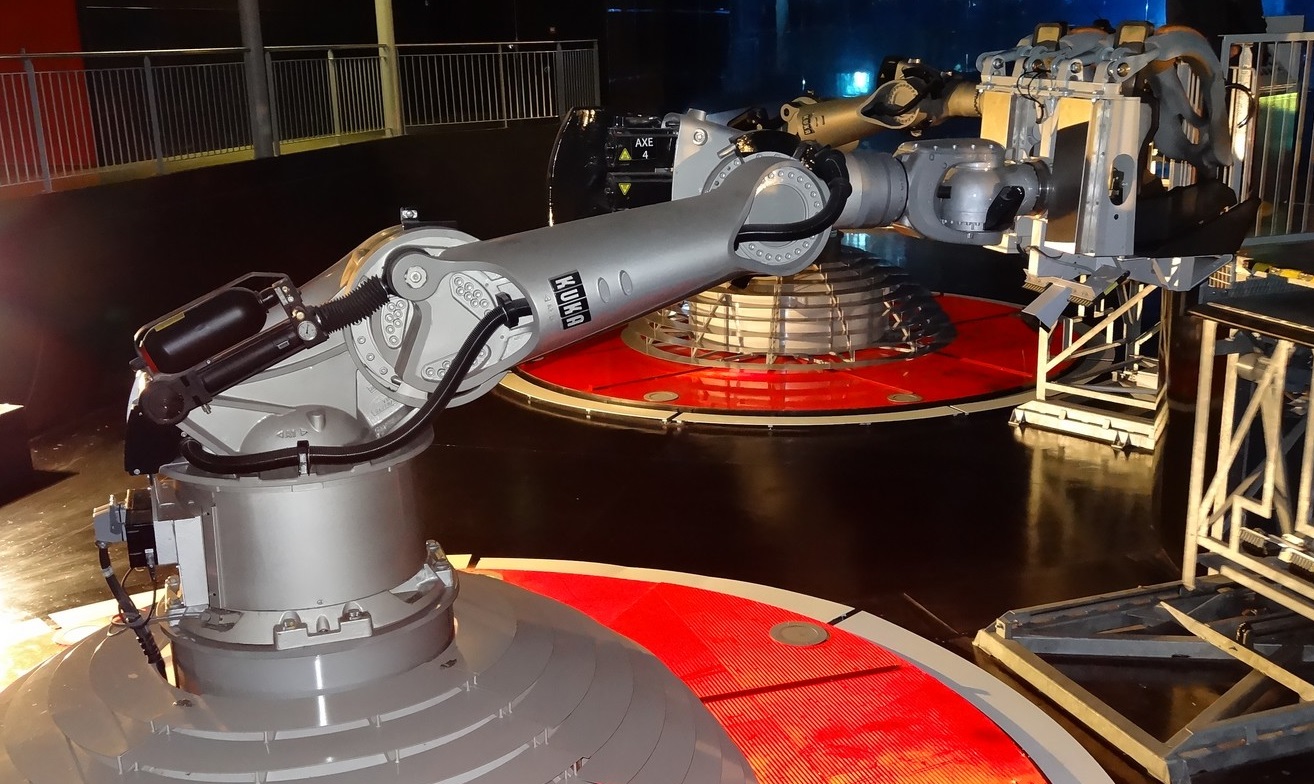
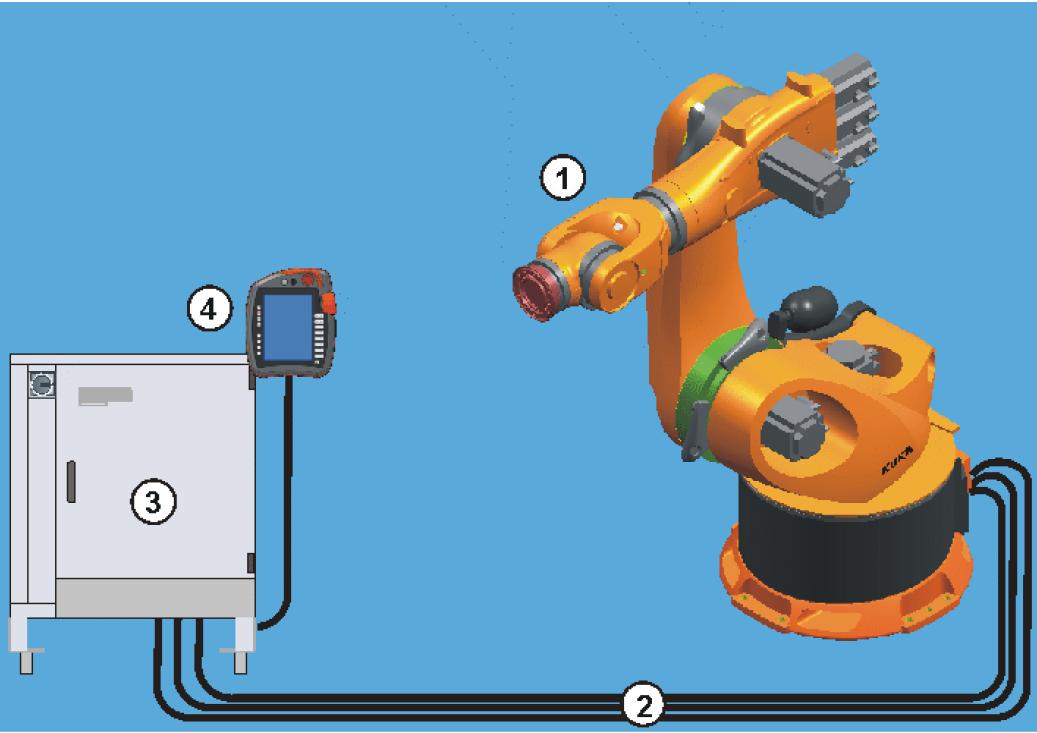
Robot Kuka KR500-3 (position étendu)
Analyse du besoin
Ce type de robot est destiné par exemple au Futuroscope qui propose l’attraction « Danse avec les robots ». Dans cette attraction, 10 robots sont mis en scène pour une chorégraphie choisie. Chaque robot a la capacité d’accueillir à bord 2 passagers. Nous avons étudié les différents aspects du robot permettant à la machine d’être piloter précisément et efficacement. Dans le cadre de cette étude, nous avons eu l’aide du parc du Futuroscope, nous permettant ainsi de visiter l’attraction “danse avec les robots”, équipé de robot Kuka KR500-3.
Analyse du système
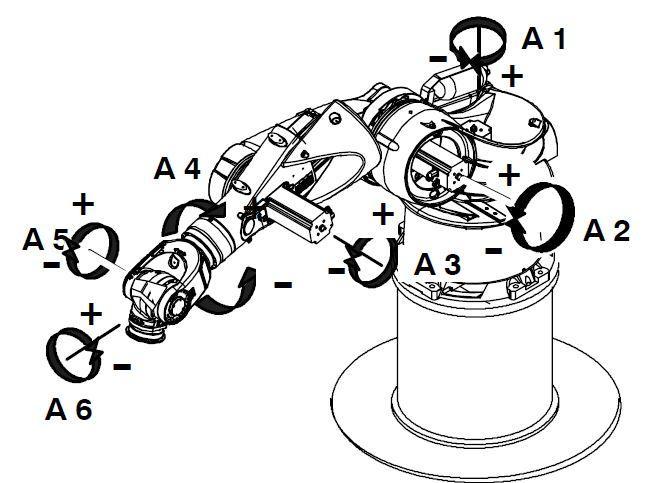
Mouvements possibles des différents axes du système
Description des différents axes (emplacement, type de mouvement)
Axes
Emplacement
Type de mouvement
Axe 1
Embase/Bâti de rotation
Rotation pivot axe Z (+/-80°)
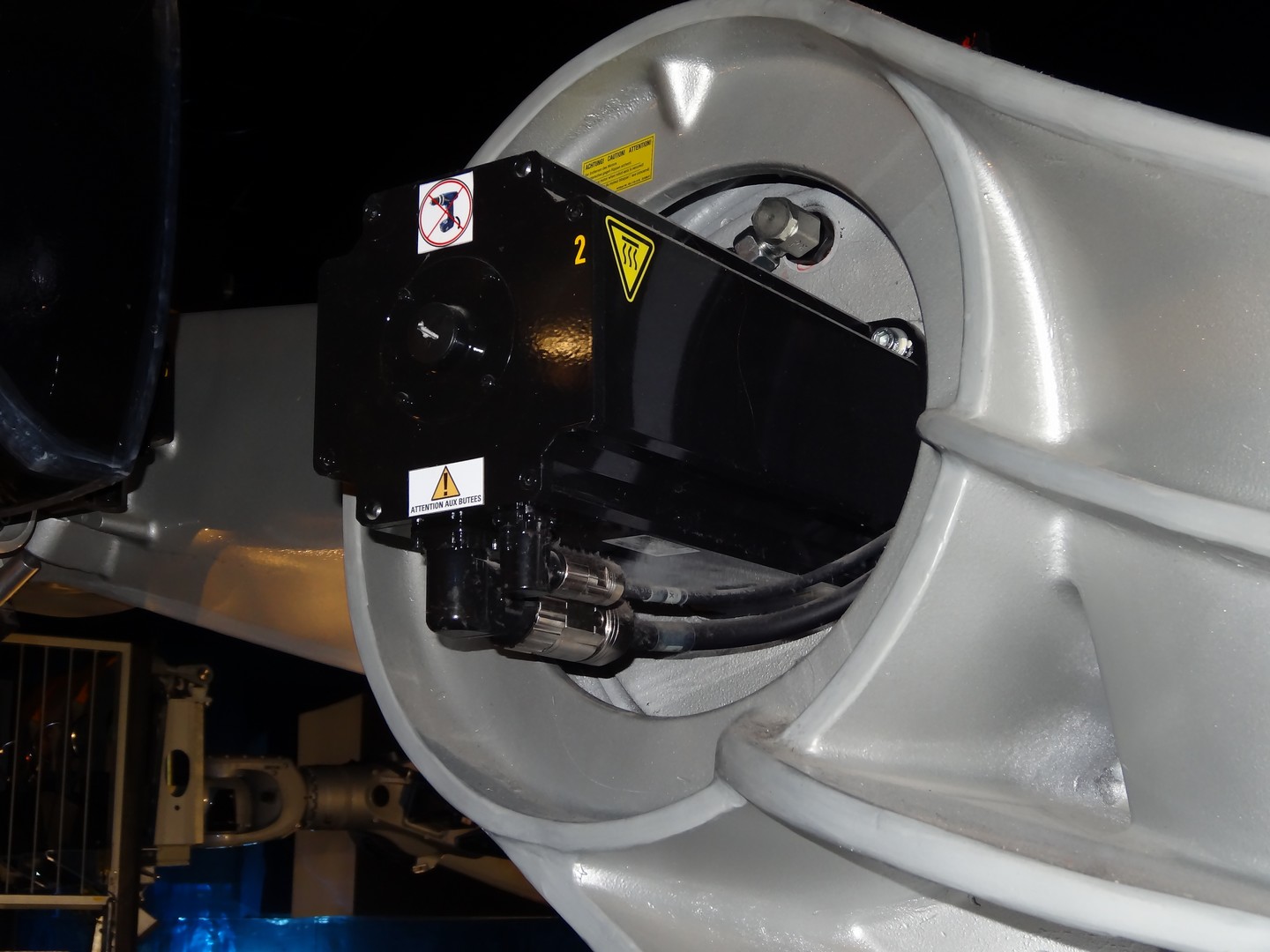
Axe 2
Bâti de rotation/Epaule
rotation pivot axe Z(+20° à -130°)
Axe 3
Épaule/Poignet en ligne
rotation pivot axe Z (+144° à -100°)
Axe 4
Poignet en ligne/Poignet en ligne
Rotation pivot axe Z (+/-350°)
Axe 5
Poignet en ligne/Poignet en ligne
rotation pivot axe Z (+/-120°)
Axe 6
Poignet en ligne/Poignet en ligne
Rotation pivot axe Z (+/-350°)
Description générale du robot avec les principaux composants
1. Robot 2.Câbles de liaison 3.Commande de robot 4.Boîtier de programmation portatif smart Pad
Caractéristiques du robot Kuka KR 500-3 :
Poids : 2 375 kg
Volume de travail : 68m3
Nombre d’axes : 6
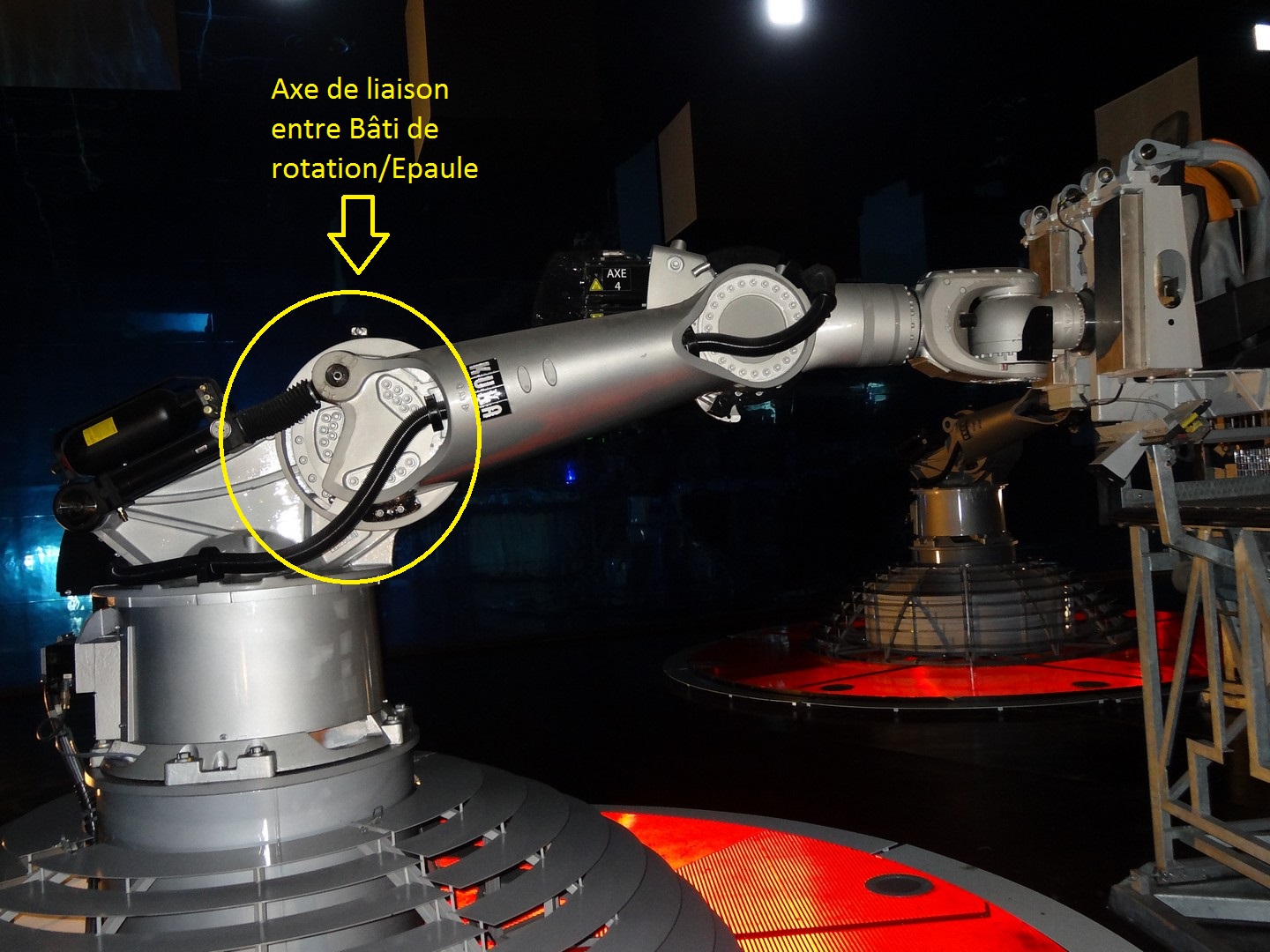
Diagramme FAST du robot
Description des différents composants permettant la précision du Robot
Pour être piloté précisément l’équipe d’ingénieur ayant conçu le robot a dû faire face à des contraintes techniques qui sont les suivantes :
La gravité
L’inertie
La masse
Les contraintes mécaniques
Et la position exacte de chaque axe
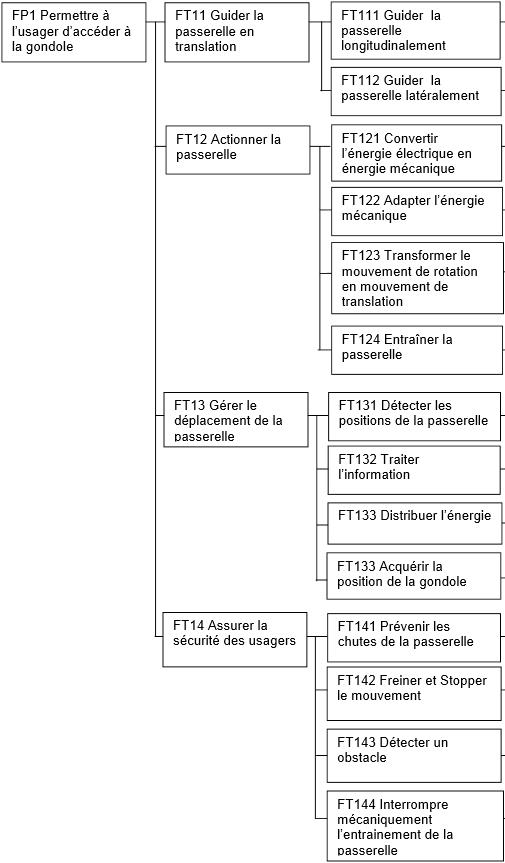
Le robot est équipé de moteurs triphasés (Fig.1 et 2)permettant ainsi un couple et une puissance plus élevé. Par conséquent une puissance plus élevé permet des accélérations plus rapides (contrairement à un moteur à courant continu ne pouvant accepter une telle puissance).
Moteurs triphasées de l’axe 2 et 3 (Fig.1)
Moteur triphasé de l’axe 2 (Fig.2)
Mais cette force exerce une contrainte mécanique plus importante notamment sur la liaison entre le bâti de rotation et l’épaule (Fig.3).
axe 2 (Bâti de rotation/Epaule) (Fig.3)
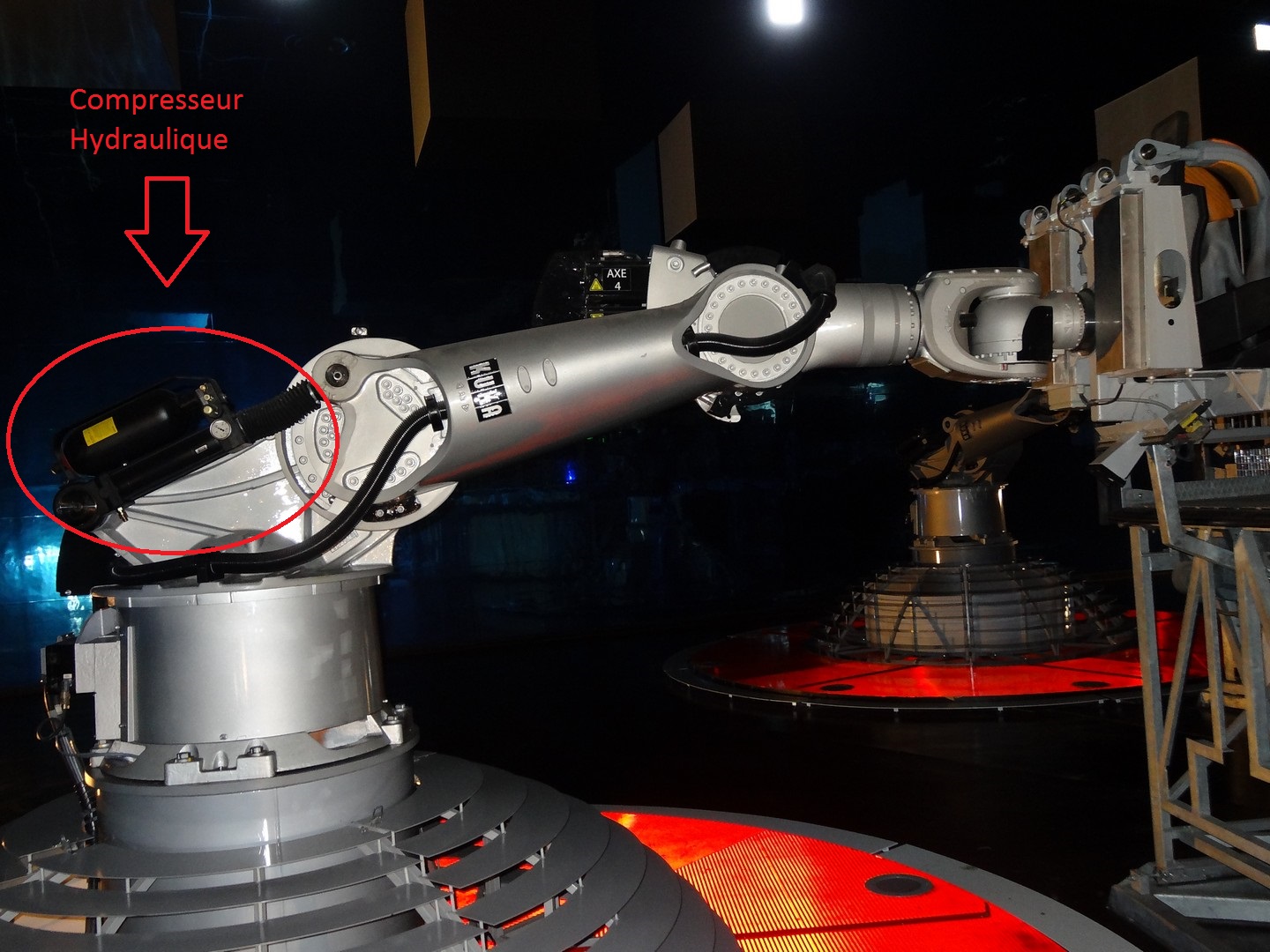
Pour pallier cette force, parfois violente, un compresseur hydraulique(Fig.4), fixé sur le bâti de rotation permet d’absorber celui-ci.
Compresseur Hydralique de l’axe 2 (Bâti de rotation/Epaule) (Fig.4)
Par la suite cette force étant emmagasinée dans le compresseur, elle va être libérée et ainsi générer une force supplémentaire pour un mouvement dans le sens inverse. D’autre part la puissance des moteurs et du compresseur ont permis de lutter contre certains phénomènes physiques comme par exemple la masse du robot, la gravité, et l’inertie du robot.
Mais toute cette puissance ne permet pas à elle seule d’avoir une précision des mouvements du robot. Un autre point essentiel est le contrôle du robot. Chaque moteur est donc équipé d’un capteur de position angulaire permettant au Boîtier de Programmation Portatif(Fig.5) de savoir précisément la position exacte de chaque axe, si oui ou non le robot est à la bonne position.
SmartPAD (Boitier de programmation portatif) (Fig.5)
Dans le cas contraire la position sera rectifiée immédiatement.
Conclusion :
Le robot est donc piloté précisément grâce aux capteurs de position angulaire de chacun des 6 axes, permettant ainsi au boitier de programmation portatif de connaitre la position de chaque axe à tout moment. Les mouvements du robots sont, quand à eux effectuer avec précision par les 6 moteurs triphasées.
-La thermographie aérienne sert également à réaliser des détections de cavités souterraines, des détections de fuites hydrauliques souterraines importantes, des contrôles de centres d’enfouissement recherche de pollutions sur terre et en mer.
Analyse du système
FS1 : Permettre à un opérateur d’effectuer des relevés de thermographie infrarouge sur une station de ski.
FT2 : Transporter, orienter et piloter une caméra thermique infrarouge.
Ballon captif blanc, nacelle noire sous le ballon contenant une caméra à thermographie, relié à un treuil par un câble
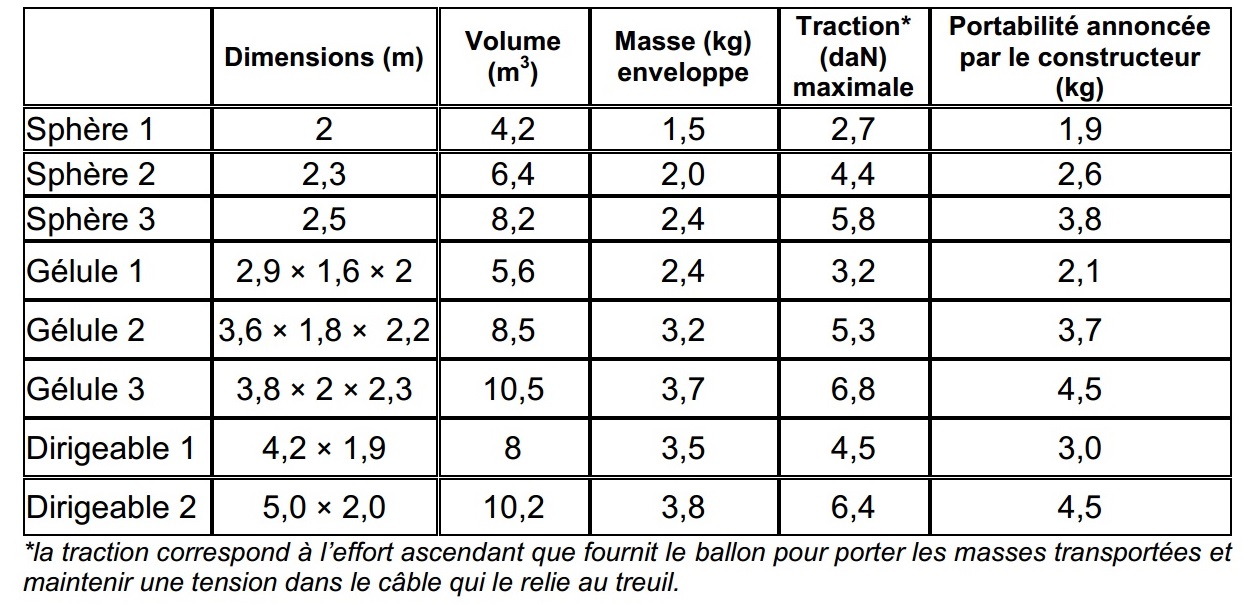
Une solution technique qui a été retenu par le constructeur est l’utilisation du ballon « Gélule 2 » car il permet de transporter une masse totale de 3,7 kg ; cette masse équivaut à la somme des masses de la caméra, des systèmes de fixation qui fait 1,7 kg, il faut y ajouter celle du câble et de la nacelle, qui fait 3,7 kg.
Dimensions, caractéristiques et performances ( en plaine) des différents ballons captifs
(Source : Bac 2013 – Sciences de l’ingénieur )
Afin de réduire son impact environnemental, le système choisi est un ballon sphère car, contrairement au ballon dirigeable, il est peu coûteux et facilement transportable.
Le treuil reste immobile sur le sol, le ballon se dirige selon une trajectoire strictement verticale la caméra suit la direction du ballon et elle sera dirigé a distance,
La tension moyenne est de 12V pour le moteur. La vitesse angulaire à la sortie du moteur est réduit par un réducteur à engrenage et une transmission par poulies crantées. Pendant une montée, une simulation a permis de déterminer 900 joules d’énergie consommée. Le rendement du variateur de vitesse est à peu près égal à 100%. La consommation d’énergie en termes de vitesse est donc négligeable.
Les différent matériaux utilisés sont le carbone, l’aluminium, l’acier inoxydable, fibre de verre.
Evolution possible du ballon captif
Les évolutions possibles pouvant être apportées, sous forme fonctionnelle du système, seraient d’ajouter un moteur sur le ballon qui permettrait de le diriger à distance à l’aide d’une télécommande sans fil, d’augmenter l’autonomie de la caméra.
Comparaison du Ballon captif, à différents moyens de transport
Type
alimen-tation
Coût
Consommation
Niveau sonore
Hauteur de prise de vue
Émission de CO²
Type de mesures
Hélicoptère léger (2/3 places)
pétrole
250 € / h
chère
30 à 40 litre / h
( polluant )
70 dB à 500 m
(bruyant)
Mini 400 m
(grande hauteur)
Oui
Toitures sur grande zone
Hélicoptère mono-turbine (5/6 places)
pétrole
500 € / h
(chère)
100 à 140 litre / h
( polluant )
70 dB à 500 m
(bruyant)
Mini 400 m
(grande hauteur)
Oui
Toitures sur grande zone
Avion de tourisme
pétrole
110 € / h
(chère)
27 litre / h
( polluant )
70 dB à 500 m
(bruyant)
Mini 400 m
(grande hauteur)
Oui
Toitures sur grande zone
U.L.M
pétrole
110 € / h
(chère)
27 litre / h
( polluant )
35 dB
à 500 m
(bruyant)
Mini 400 m
(grande hauteur)
Oui
Toitures sur grande zone
Ballon Captif
/
30 € / h
(peu
chère)
0 litre / h
( non polluant )
0 dB à 0M
(pas bruyant)
Max 150m
(petite hauteur)
Non
Toiture, façades et sites difficiles d’accès
Vue d’un ballon captif pour thermographie aérienne
Contrainte liée au Ballon captif
le ballon captif doit pouvoir résister a des températures très froide, à résister aux vents puissants, il ne doit pas s’envoler et doit être maîtrisé au sol et que le système de retenue soit résistant est maniable.
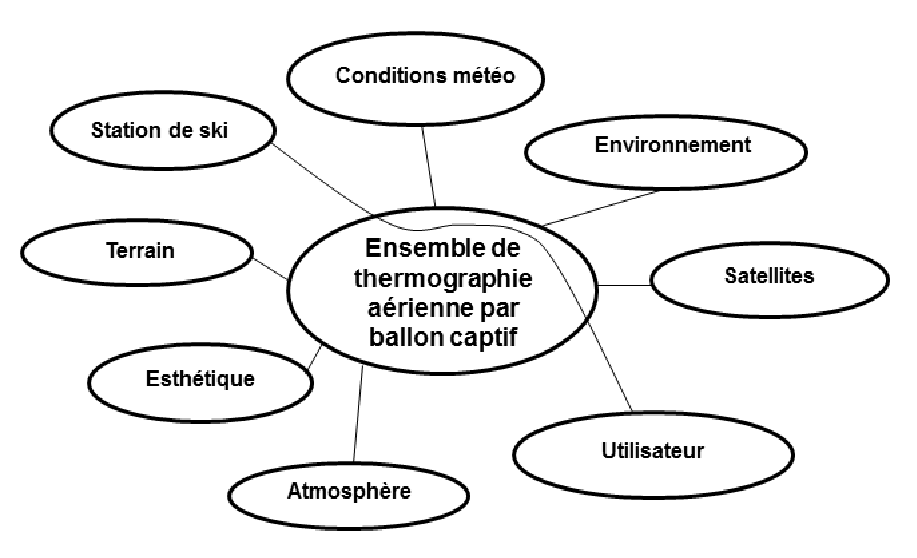
Diagramme pieuvre d’un ballon captif à thermographie aérienne
Stationdeski : FS1 : permettre à un opérateur d’effectuer des relevés de thermographie infrarouge sur une station de ski.
Condition météo: FS2 : être utilisable sous certaines conditions météorologiques.
Terrain : FS3 : s’adapter au terrain d’évolution.
Atmosphère : FS4 : être utilisable quelle que soit l’altitude du terrain.
Esthétique : FS5 : être esthétique (aspect des matériaux, formes, couleurs, etc.).
environnement : FS6 : respecter les normes environnementales.
Satellites : FS7 : connaître les coordonnées G.P.S de la prise de vue