Le LP2I
Le LP2I fut construit en 1987, par un architecte du nom de François-Xavier Désert et l’agence Architecture-studio.

Construction du lycée. https://fr.wikipedia.org
Sa structure porteuse :
On observe que le sol est en fait une dalle soutenue par des poutres elles même soutenues par des poteaux. Ceux ci sont alignés de haut en bas du rez de chaussé au 4ème étage.

Dalle soutenue par la poutre. LP2I
Les différentes poutres sont reliées aux poteaux par des pièces métalliques elles servent à répartir la masse des poutres et de la charge qu’elles portent au centre du poteau. En voici une :

Pièce métallique reliant les poutres. LP2I
Le lycée est constitué de nombreuses poutres et structures porteuses, on remarque que dans la cour intérieure les fenêtres sont petites car elles doivent laisser suffisamment d’espace pour des poteaux passant entre elles.

Cour intérieure du lycée. http://www.projetcelestin.fr
Le béton est renforcé par des barres d’acier comme dans les poutres par exemple. Cet alliage se nomme du béton armé.

Exemple de ferraillage d’un poteau (béton armé). http://www.larousse.fr
Pour les grands espaces, comme la cafétéria au lieu d’utiliser des poteaux comme pour le reste du bâtiment il y a trois grandes structure triangulaire qui portent tout l’espace autour du vide du 1er au 4ème étage. On peut observer qu’ils sont creux. Cette structure, de part sont originalité se démarque et représente une certaine forme d’innovation. De plus sa forme compacte lui permet d’éviter les échanges de chaleur économisant de l’énergie.

Vue extérieure du lycée. http://www.lp2i-poitiers.fr/
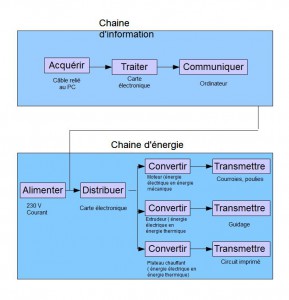
Chaîne d’énergie de l’éclairage

Chaîne d’énergie de l’éclairage. LP2I
Le réseau WiFi du lycée
Le lycée dispose de son propre réseau WiFi. Sa gestion est centralisé et de nombreuses bornes sont disséminés dans l’enceinte du lycée. On ne peut en rajouter actuellement, en effet le lycée est saturé en bornes. Si l’on décidait d’en rajouter cela créerait des interférences.
Borne WiFi. LP2I
La coupole (toît amovible)
Vidéo de la coupole en action :
Sa chaîne d’énergie :
La coupole du lycée est une partie du lycée représentative permettant de montrer aux gens le côté innovant du lycée.

Chaîne d’énergie de la coupole. LP2I
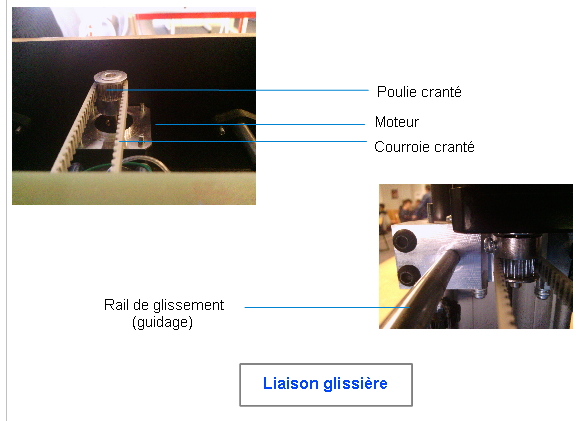
Son alimentation électrique est 380V. Elle peut réaliser la commande automatique ( la coupole bouge ) avec le capteur anémomètre. Il va être actif lorsque la vitesse du vent est supérieure à 60km/h, grâce au système poulie courroie.
Sources de l’article :