
Le but de cette nouvelle étude était de répondre à la problématique suivante :
Comment concevoir et réaliser, de manière rapide, simple, et efficace, un robot
répondant à un cahier des charges spécifique ?
Nous avons choisi pour cela de créer un robot qui serait capable d’interpeller le spectateur et de lui raconter des blagues. Voici un schéma de ce robot.
robot interpellant le spectateur
Liste de matériaux utilisés
- Mini Lecteur MP3 DFPlayer, 24bits, 48kHz, 3W, liaison serie 9600b/s, micro SD,
réglage volume (30) et égaliseur (6), 3.2V a 5V, 20×20 mm
- 1 Haut-parleur 3 W nom (5 W max), 4 Ω, 280 Hz, 59 x 26 mm, Monacor 6/4SQ2
- 2 Capteurs de distance GP2Y0A02YK0F IR sharp
de 20 a 150 cm
- Carte micro SD 8 GB, classe 10 + adaptateur, Verbatim
- Moteur Nema 17, moteur pas à pas hybride, 200 pas
- Carte DFRduino Micro DFR0225 (équivalent Arduino Leonardo + 2 sorties pour
moteur 6 a 23V DC, 2A max)
- Masque de carnaval pour la tête du robot
- Cou du robot fabriqué avec l’imprimante 3D du lycée
Avant de concevoir notre robot ,nous avons réalisé une chaîne d’information et d’énergie pour permettre d’identifier les besoins du robot (celle-ci n’est peut être pas complète car elle a été réalisée au début du projet)
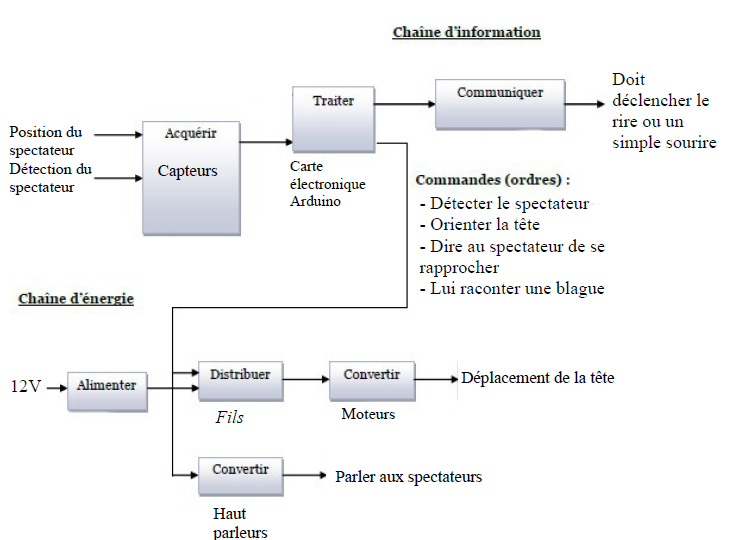
Chaîne d’information et d’énergie
L’électronique et son rôle dans le robot

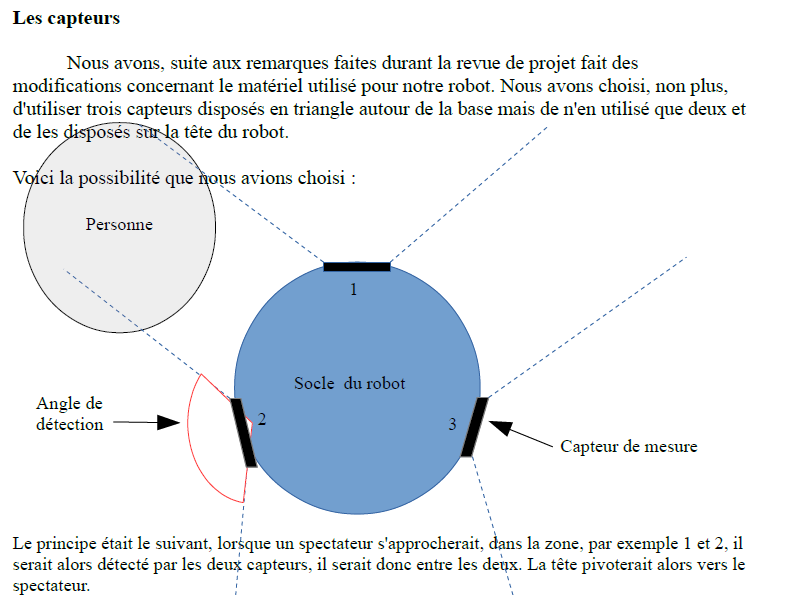
capteur de distance
Pour localiser le spectateur
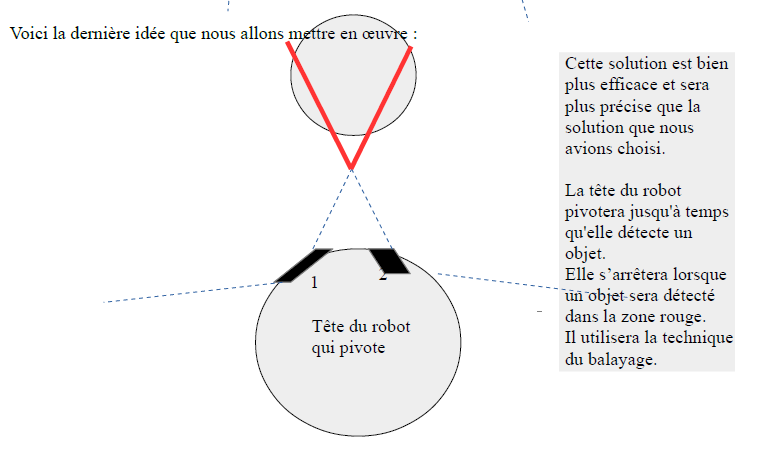
Le robot sera équipé de capteurs de distance qui seront disposés derrière les yeux du masque de carnaval ce qui permettra de localiser le spectateur. Nous avons choisi d’utiliser deux de ces capteurs pour permettre de repérer le spectateur dans une petite zone située en face de lui (voir plus bas).
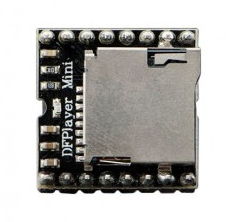
Module MP3
Pour dialoguer avec le spectateur
Pour dialoguer avec le spectateur, le robot sera équipé d’un haut parleur ainsi que d’un lecteur MP3 qui permettra de diffuser des morceaux audio pré-enregistrés sur une carte SD qui déblatérera des blagues et des citations célèbres. Tous nos fichiers audio seront stockés sur la carte SD

Moteur NEMA 17
Pour mouvoir la tête du robot
Pour cela nous allons utiliser un moteur de type NEMA17, pour déplacer la tête du robot et
l’orienter vers le spectateur. Nous avons choisi ce type de moteur car sa rotation peut être contrôlée précisément et permettra de balayer une zone pour repérer un spectateur à l’aide des capteurs.
Pour traiter les informations
Pour traiter les informations, nous utiliserons une carte électronique programmable Arduino.
En terme de logiciel
Pour le compte rendu, nous avons utilisé Libre Office Writer, car c ‘est un logiciel libre et
gratuit. Nous avons choisi d’utiliser le logiciel Blockly Arduino. En effet ce logiciel possède une interface simple d’utilisation et est très plaisant.
Amélioration en cours de projet du robot
Les programmes
Voici le programme nous permettant de mettre en oeuvre le moteur NEMA 17
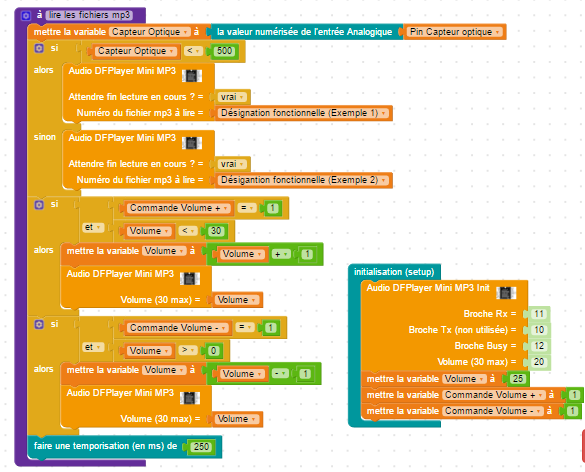
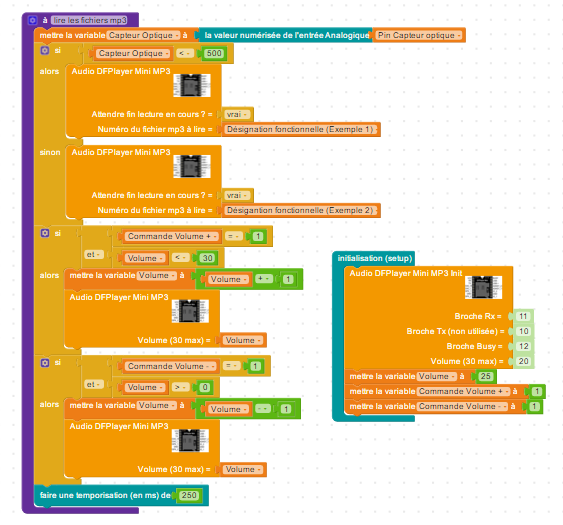
Et voici celui qui nous permettra d’utiliser le module MP3
Le cou du robot
Nous avons réalisé le cou du robot grâce au logiciel Solidworks dont nous disposons au lycée. Ce cou nous permettra de transmettre la rotation de l’axe moteur à la tête de notre robot. En effet nous avons dû réaliser une pièce qui serait capable de s’encastrer sur le méplat de l’axe.
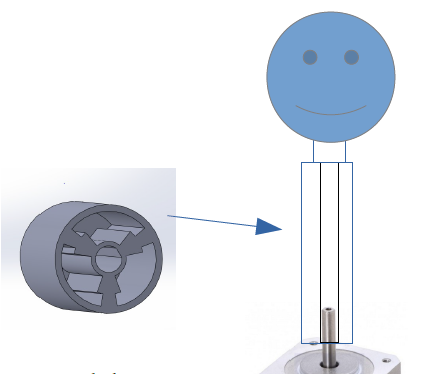
Le cou du robot sera imprimé à l’aide de l’imprimante 3D du lycée Tobeca 2.
Imprimante 3D Tobeca 2
Tous les autres composants électroniques seraient fixés à l’arrière du masque.
Nous n’avons pas pu finir ce projet par manque de temps …