En cours de Sciences de l’ingénieur nous avons du analyser de façon expérimentale le fonctionnement d’un capteur. Le but étant de déterminer la nature du capteur et l’information détectée.
1 La mise en place du matériel:
Pour cette analyse nous disposions de: différents capteurs, un multimètre, un oscilloscope, un générateur basse fréquence ainsi que des fils de laboratoire pour mettre en place notre circuit. Nous avons donc branché en série le GBF, le capteur puis le multimètre réglé sur la fonction voltmètre. Le GBF réglé sur 24 V.
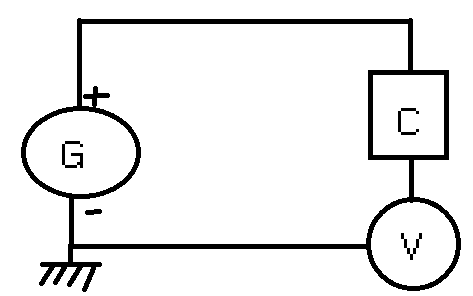
Ce schéma représente notre choix d’installation électrique
~Photo LP2I
Pourquoi utiliser un voltmètre? Pour étudier ce capteur nous avons vite remarqué que c’était un capteur de contact et donc qu’il émettrait un signal logique, nous avons donc voulu savoir quelles étaient les deux tensions transmises par le capteur. Un Oscilloscope aurait pu être utilisé mais la lecture précise des tensions aurait été plus complexe, de plus aucune variation sur le temps est intéressante à étudier ( le temps de transition de la tension est négligeable).
2 La démarche expérimentale
En premier nous avons relevé la tension affichée par le voltmètre lorsque le capteur n’est pas utilisé ( en contact avec aucun objet ), cette tension est de 24 V.
Ensuite nous avons activé la détection du capteur en faisant bouger le petit levier à son extrémité qui est donc le corps d’épreuve qui régit avec le ou les éléments à détecter. La tension change alors quand le capteur est en contact avec un obstacle elle passe de 24 V à environ 50 mV. Ce changement de tension est identique que l’on pousse le levier dans un sens ou dans l’autre.
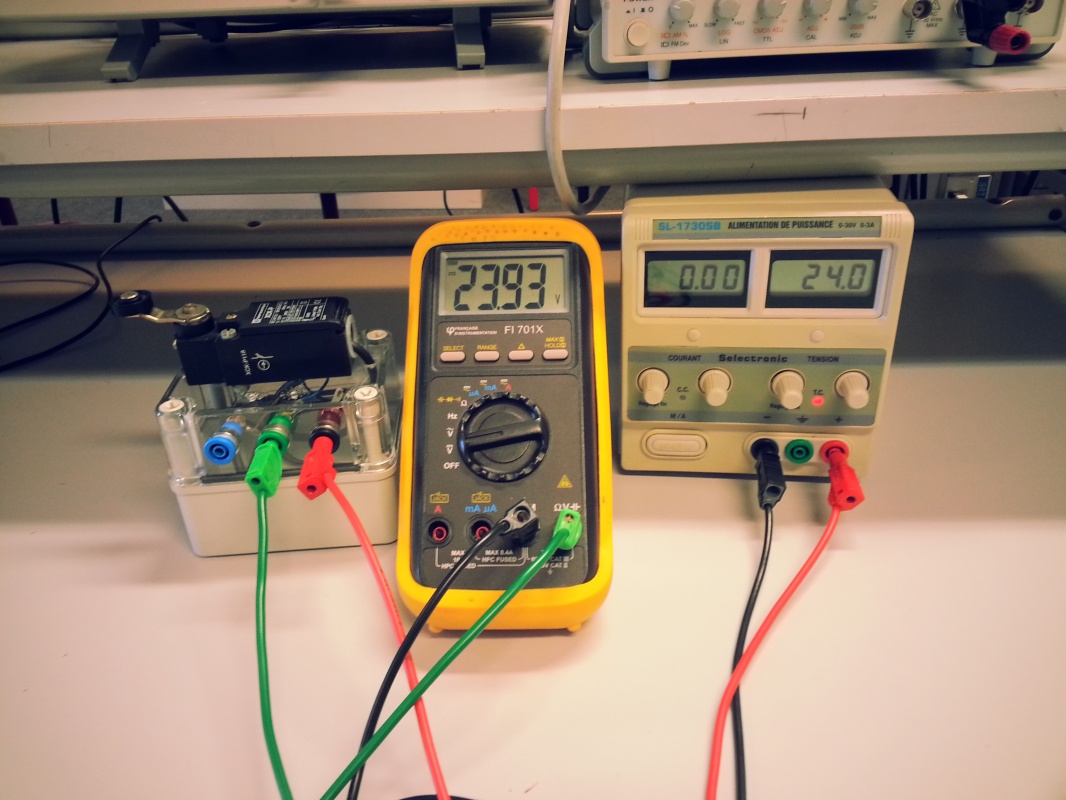
Ici le capteur n’est pas en contact avec un objet, la tension transmise est donc de 24 V
~Photo LP2I
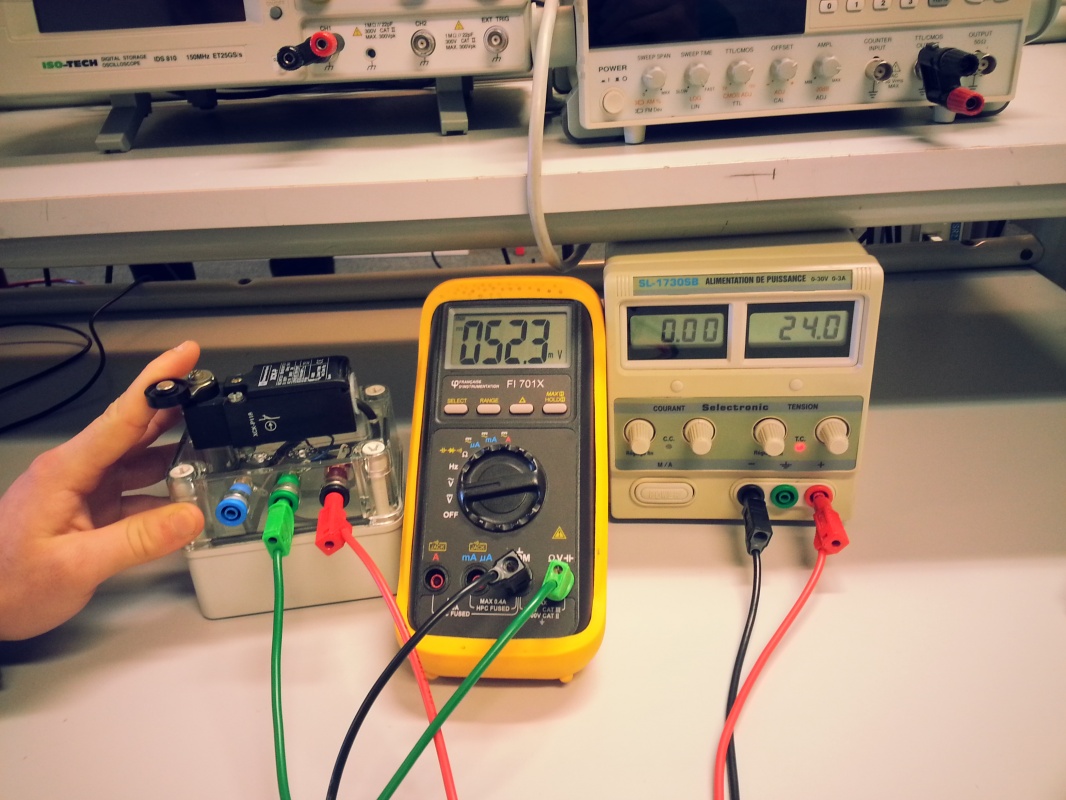
Ici le capteur est en contact avec un objet, il transmet alors un tension d’environ 50 mV
~Photo LP2I
Interprétation:
Ce capteur est un capteur de contact, il transmet une information logique ( il y a un obstacle ou il n’y en pas ). Il permet de renseigner sur la position d’un objet.
3 Utilisations envisageables de ce capteur:
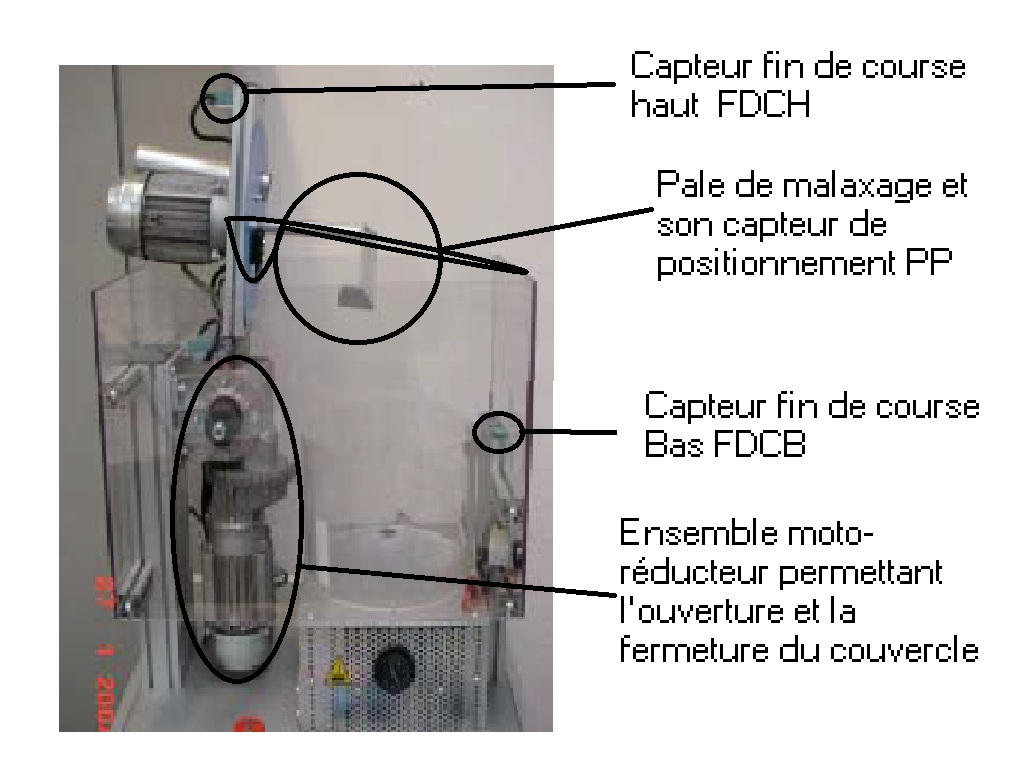
Ce capteur peut servir de capteur fin de course puisque c’est un capteur de position.
Il pourrait donc être adapté sur le malaxeur: On le place au niveau du couvercle, en utilisant sa particularité de « double sens » on utilise alors un seul capteur pour savoir si le couvercle est fermé ou ouvert au lieu de deux capteurs.
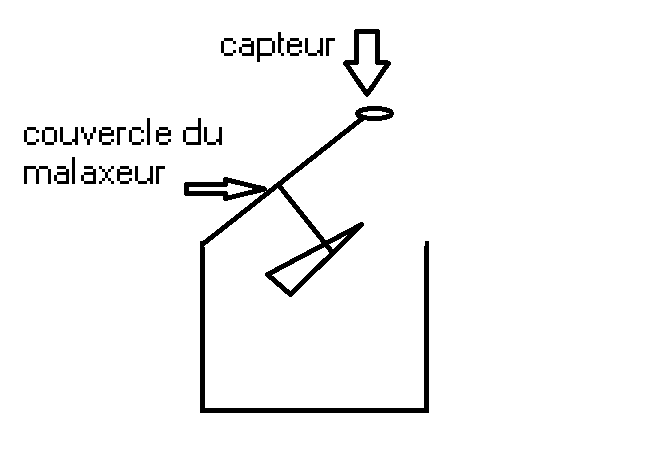
Avec ce schéma on visualise ou le capteur peut être placé sur le malaxeur.
~Photo LP2I