
1 Compte-rendu de l’étude d’un système motorisé d’essuie-glace
1.1.Constitution de l’équipe et choix du système
1.1.1.Equipe
– Quentin D
– Clément C.G
– Chonghan X
– Rémi L
1.1.2.Système choisi
– Dispositif d’Essuie-Glace de la Renault Scenic 2
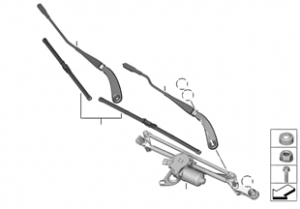
système d’essuie-glace d’un Renault scénic
1.2.Analyse du besoin et analyse externe du système
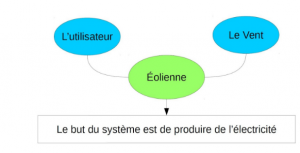
1.2.1.Description du besoin
– Nettoyer le pare-brise de la voiture sous la pluie, afin de fournir au conducteur un champ de vision le plus large et propre possible.
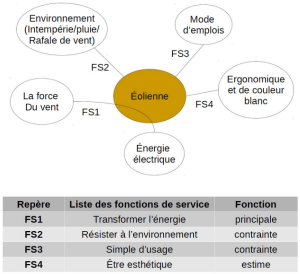
1.2.2.Principales fonctions de service du système et contraintes
– Faire un mouvement d’aller-retour sur le pare-brise en temps de pluie.
– Ne pas encombrer le champ de vision de l’automobiliste
– Ne pas aller trop lentement pour que le pare-brise puisse être dégager rapidement.
– Doit pouvoir résister aux différents intempéries
1.2.3.Description du fonctionnement, vu de l’utilisateur
– Les essuie-glace effectuent un mouvement d’essuyage parallèle. Ils sont équipés des pivots, ce qui élargit leurs rayon d’action. Adaptée aux dimensions du pare-brise, elle permet un champ de vision totalement dégagé.
1.3.Analyse partielle d’une chaîne d’énergie
1.3.1.Description d’une chaîne d’énergie
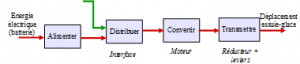
chaîne d’énergie
1.3.2.Analyse de solutions techniques
Mouvement d’aller-retour sur le pare-brise. Le dispositif doit pouvoir nettoyer le champ de vision du conducteur.
1.4.Analyse et modélisation d’une fonction cinématique du système
1.4.1.Choix d’une fonction permettant de transmettre un mouvement
Mécanisme de transmission du mouvement de rotation de l’axe moteur à la barrière articulée
1.4.2.Analyse cinématique
Schéma cinématique :

1.5.Modélisation, simulation et réalisation d’un dispositif expérimental
1.5.1.Conception d’un dispositif expérimental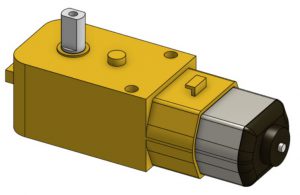
Motoréducteur utilisé pour cette étude (source : banggood.com)
A l’aide d’un moteur montrer ci-dessus, nous allons faire tourner une pièce pour que le reste de l’ensemble du dispositif puisse effectuer des rotations, ce qui entraînera le mouvement souhaité qui est un aller retour du balai
1.5.2.Découverte du logiciel de modélisation 3D Onshape
Modélisations réalisées à partir de l‘article sur le blog de la SI au LP2I présentant le logiciel de modélisation 3D Onshape. Notre modélisation expérimentale est disponible sur ce site
1.5.3.Modélisation 3D de votre dispositif expérimental avec Onshape
– Présentation du dispositif expérimental modélisé avec Onshape
. Croquis
1) pièce noir : axe fixe relié au moteur
2) Pièce bleu : pièce fixer au moteur (celle qui entraîne la rotation du dispositif)
3) pièce rouge : transmet le mouvement aux autre pièces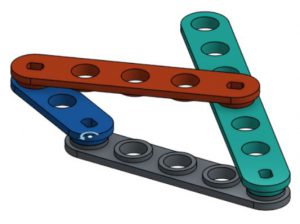
4) pièce verte : manche du balai d’essuie-glace
. Lien vers la modélisation 3D réalisée avec Onshape
https://cad.onshape.com/documents/581f870b48ac6210957ec951/w/990bd6f206b9420240650ce6/e/9ee8333f5ec6e80220277699
1.5.4.Simulation de la transmission de mouvement avec Onshape
– Simulation de la transmission de mouvement considérée en animant votre modèle 3D avec Onshape.
Pour l’animation, on prend comme point de départ 0° et effectue une révolution, soit comme point d’arrivé 360°


.gif){kind=link}