
Problématique :
Comment concevoir, réaliser de manière rapide, simple et efficace un robot répondant à un cahier des charges spécifiques ?
| Caractéristiques | Capacités |
Dimension :
|
|
Pour une personne extérieure, nous pouvons retrouver ce genre de robot dans la vitrine d’un magasin par exemple. Notre robot répondra à une fonction décorative et/ou divertissante.
Nous souhaitons réaliser un robot pouvant danser lorsqu’il entend une musique.
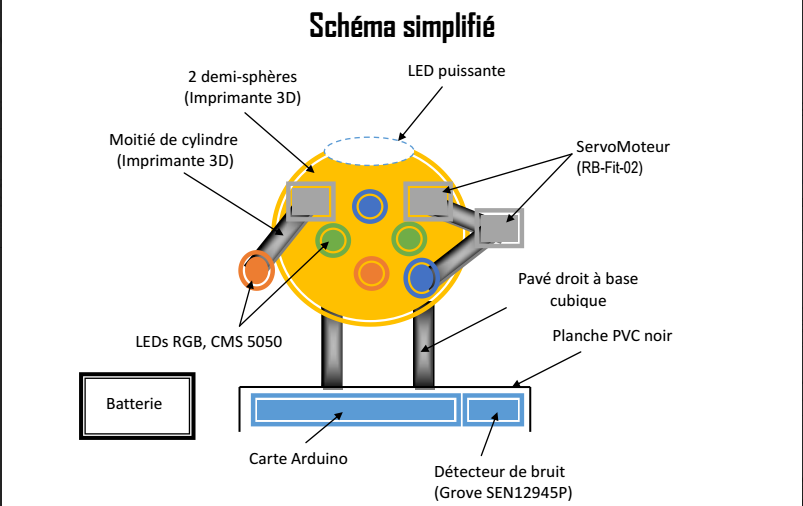
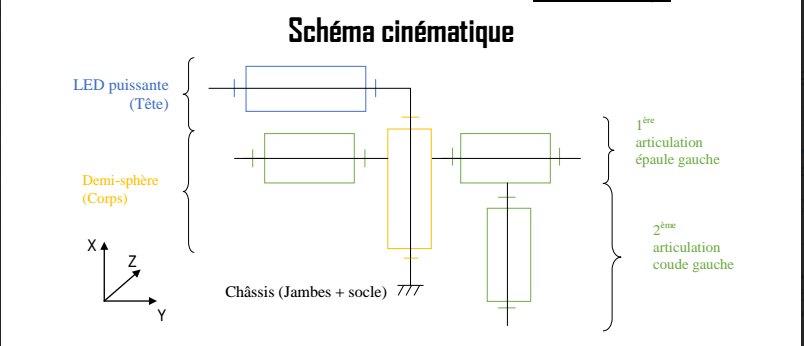
Pour cela, le robot serait posé sur un socle (plaque de PVC noire 3mm 15*20), ses jambes seraient immobiles (PVC découpé). Sa tête serait une assez grosse LED de couleur blanche. Son corps (équivalent au ventre) quant à lui serait deux demi-sphères réalisées à l’aide de l’imprimante 3D recouverte de LED s’illuminant en décalé pour créer un jeu de lumières. Au niveau des bras, ils seraient en mesure de bouger une articulation minimum (équivalent à l’épaule) de chaque côté, et une deuxième articulation sur un des deux bras (équivalent au coude).
Liste de matériels
| Partie du robot | Référence |
| Tête
Corps et mains
Articulations bras Bras Corps Jambes Socle Alimentation |
LED puissante
LEDs RGB, CMS 5050 Détecteur de bruit Grove SEN12945P Servo moteur…… Baguette noire 2 demi-sphère (imprimante 3D) PVC noir PVC noir (15×20) Batterie |
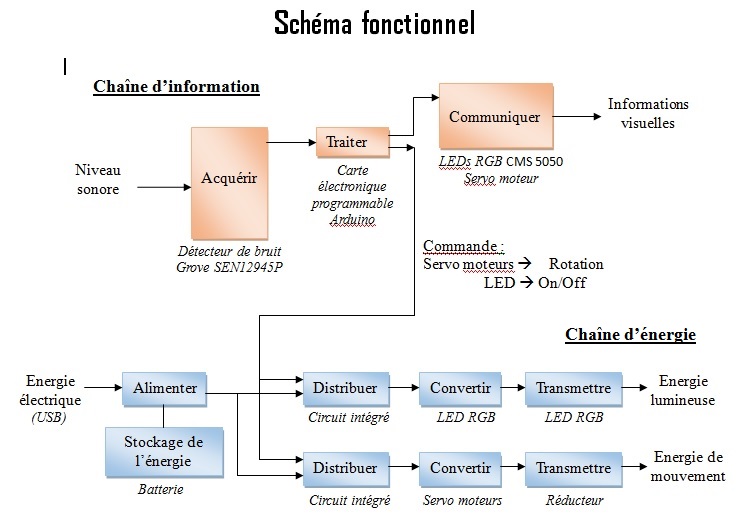
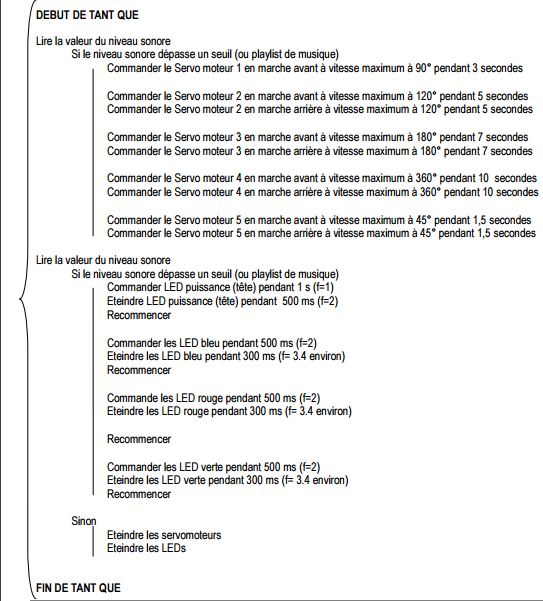
Notre algorithme
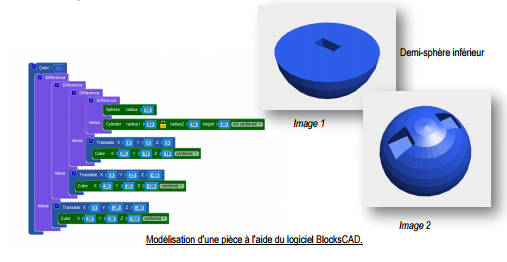
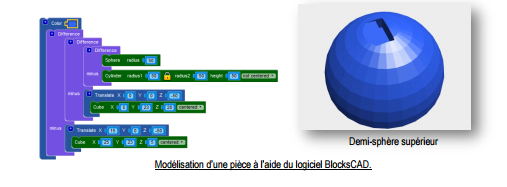
Modélisation de pièces mécaniques en 3D
- Au niveau du corps de notre robot :
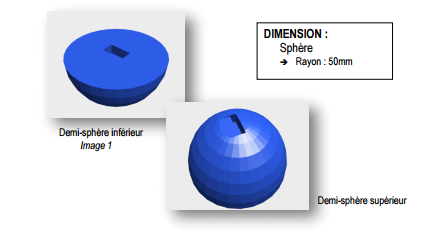
Cette demi-sphère représente la partie basse du corps de notre robot. Le rectangle encastré sur la face du dessus (Image 1) servira à mettre le servo moteur 4 et fera ensuite tourner l’autre demi-sphère. Tandis que les deux autres encastrements (Image 2) laisseront place aux deux jambes du robot. Cette pièce restera immobile, reliée au socle à l’aide des deux jambes.
Cette demi-sphère représente la partie haute du corps de notre robot. Le rectangle encastré sur le dessus de la sphère, nous servira à placer un autre servo moteur 5, qui cette fois-ci fera pivoter la tête, autrement dit la « LED puissante ».
Nous avons volontairement encastré un rectangle plus profond (20mm) ; car le servo moteur une fois coucher entrainera un petit disque qui fera pivoter la LED de 90° de sa position extrême à l’autre.
 Les dimensions :
Les dimensions :
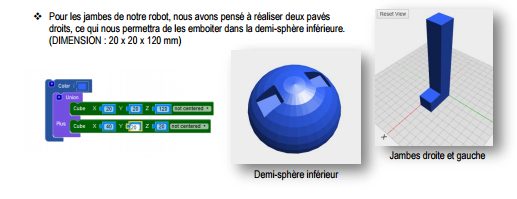
 Les jambes du robot :
Les jambes du robot :
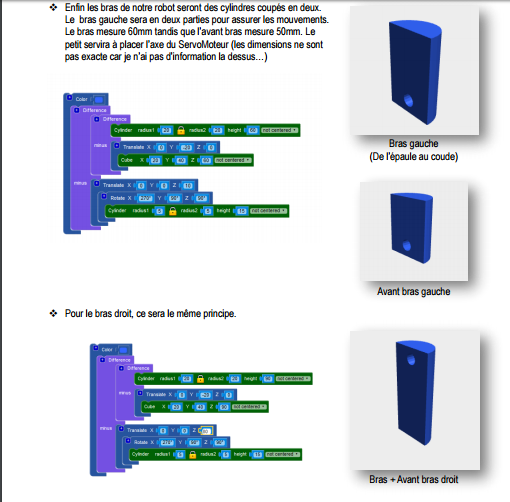
 Les bras du robot :
Les bras du robot :
 La modélisation de nos pièces mécaniques est en cours de réflexion pour rendre l’impression 3D réalisable.
La modélisation de nos pièces mécaniques est en cours de réflexion pour rendre l’impression 3D réalisable.