
Avec mon groupe composé de BOURIT Éloïse, RICHARD Grégoire, PROT Élisa et moi même (TEXIER Théo), nous avons étudié deux moteurs pour la réalisation de notre maquette de lanceur.
L’objectif de cette expérimentation est de déterminer quel type de moteur nous allons utiliser dans cette maquette du lanceur Ariane 5.
Tout d’abord, nous avons réalisé des expérimentations avec un motoréducteur.
I. Protocole expérimental du Moteur à courant continu
Pour ceux qui souhaiteraient un peu plus d’informations au sujet de ce type de moteur, vous pouvez vous rendre sur l’article de M. Pers au lien suivant : Matériel pour enseigner les Sciences de l’ingénieur ou encore sur les fiches produit du revendeur Gotronic ou bien encore Bang good
Pour ceux qui souhaiteraient acheter ce moteur, vous pouvez les trouver chez Gotronic,qui est un revendeur en France. De plus si vous voulez ce moteur, vous pouvez le trouver chez un revendeur chinois au lien suivant Plastic Tire Wheel With DC 3-6v Gear Motor For Arduino Smart Car
a. Descriptif de l’expérience
Nous avions à disposition le matériel suivant:

Motoréducteur
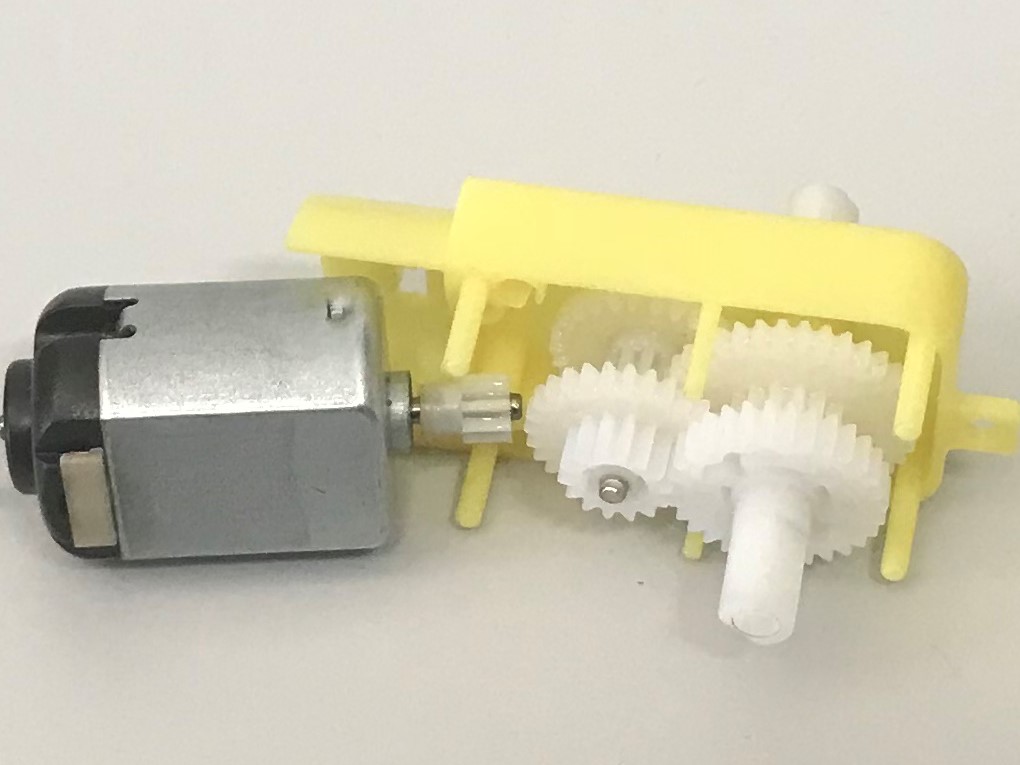
Motoréducteur décapoté
Voici ce à quoi ressemble notre montage pour la réalisation de nos mesures.
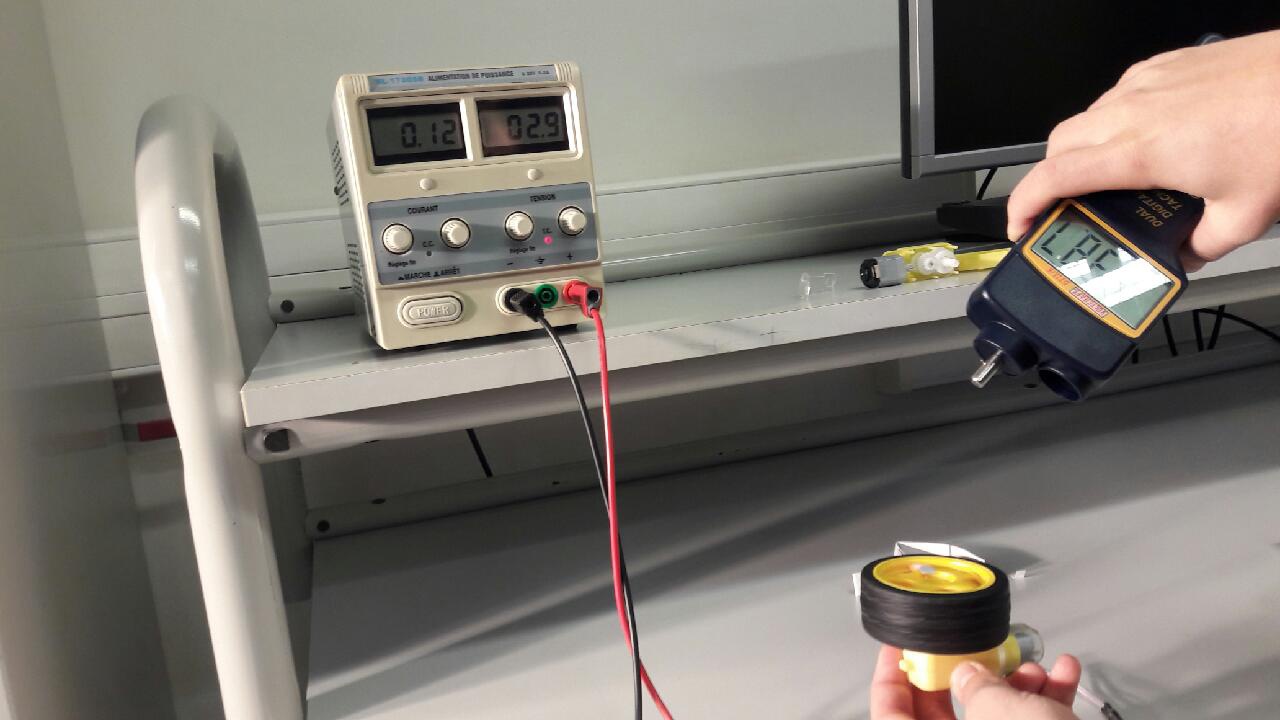
Montage pour réaliser nos mesures
Si vous souhaitez voir ce motoréducteur en fonction, vous pouvez vous rendre sur YouTube au lien suivant:
b. Mesures effectuées
Avec l’aide d’une alimentation de laboratoire, nous testerons un moteur sur une plage de tension comprise entre 3 et 6 Volts. Nous testerons aussi le fait de freiner manuellement le moteur, pour évaluer qualitativement son couple.
| U (V) | I(A) à vide | I(A) avec Crésist. | P (W) à vide | P (W) avec Crésit. |
| 3 | 0,07 | 0,35 | 0,21 | 1,05 |
| 5 | 0,08 | 0,50 | 0,40 | 2,50 |
| 6 | 0,10 | 0,80 | 0,21 | 4,80 |
Voici deux courbes pour montrer nos résultats.
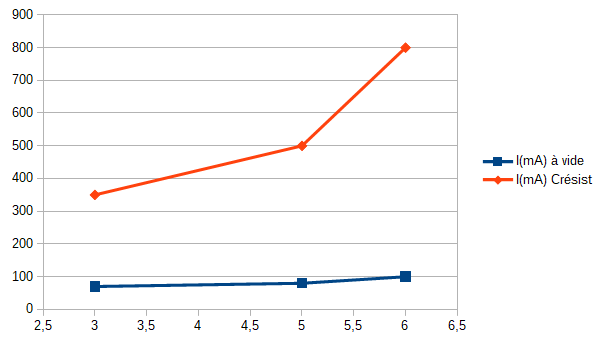
Intensité (mA) en fonction de la Tension (V)
On peut voir que l’intensité est nettement plus élevée lorsqu’on applique une résistance sur le moteur. Les variations de la courbe rouge peuvent être dûes à l’imprécision de la résistance exercée sur le moteur.
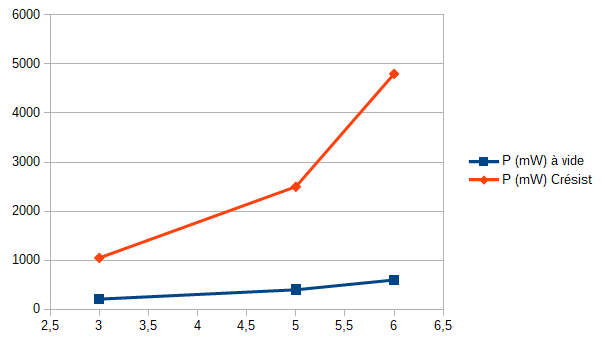
Puissance (mW) en fonction de la Tension (V)
De même pour la puissance.
Vitesse de rotation
Nous avons mesuré la vitesse de rotation du moteur grâce à un tachymètre, et une bande réfléchissante placée sur la roue.

Tachymètre, permettant de mesurer la vitesse de rotation de nos moteurs en RPM.
| U (V) | RPM |
| 3 | 95 |
| 5 | 187,5 |
| 6 | 215 |
On peut observer que la vitesse de rotation est fortement influencée par la tension du circuit.
II. Protocole expérimental du Moteur Coreless CL820
a. Descriptif de l’expérience
Dans un deuxième temps, nous avons étudié un moteur Coreless CL820 qui sera celui utilisé pour la réalisation de notre maquette. Après avoir effectué des mesures sur ce moteur à vide, nous y avons ajouté différentes hélices, une première hélice rouge, appelée King Kong, de diamètre 65mm, et une seconde hélice orange, appelée Ladybird-Z-01, de diamètre 55mm.
Pour ceux qui souhaiteraient un peu plus d’informations au sujet de ce type de moteur, vous pouvez aller voir les détails technique ce de moteur sur le revendeur suivant : Bang good.com. Sur ce revendeur le moteur est vendu entre 1,70 € et 3,41 €. Pour ceux qui souhaiterai aussi avoir des informations sur les hélices utilisés vous pouvez vous au lien suivant: Hélice (King Kong), pour un pack de 10 pairs d’hélices vous en aurez pour 4,26 €. Notre second type d’hélice sont des Hélice (Ladybird-Z-01), chez le revendeur Bang good au prix de 1,96€ le pack de 4 hélices.
Le protocole expérimental était globalement le même, cependant, nous devions prendre quelques précautions :
- Ne pas approcher les doigts de l’hélice
- Ne pas dépasser une tension supérieure à 3,7 V
- Câble noir sur câble bleu du moteur
- Câble Rouge sur câble rouge du moteur
Nous avions à disposition le matériel suivant:
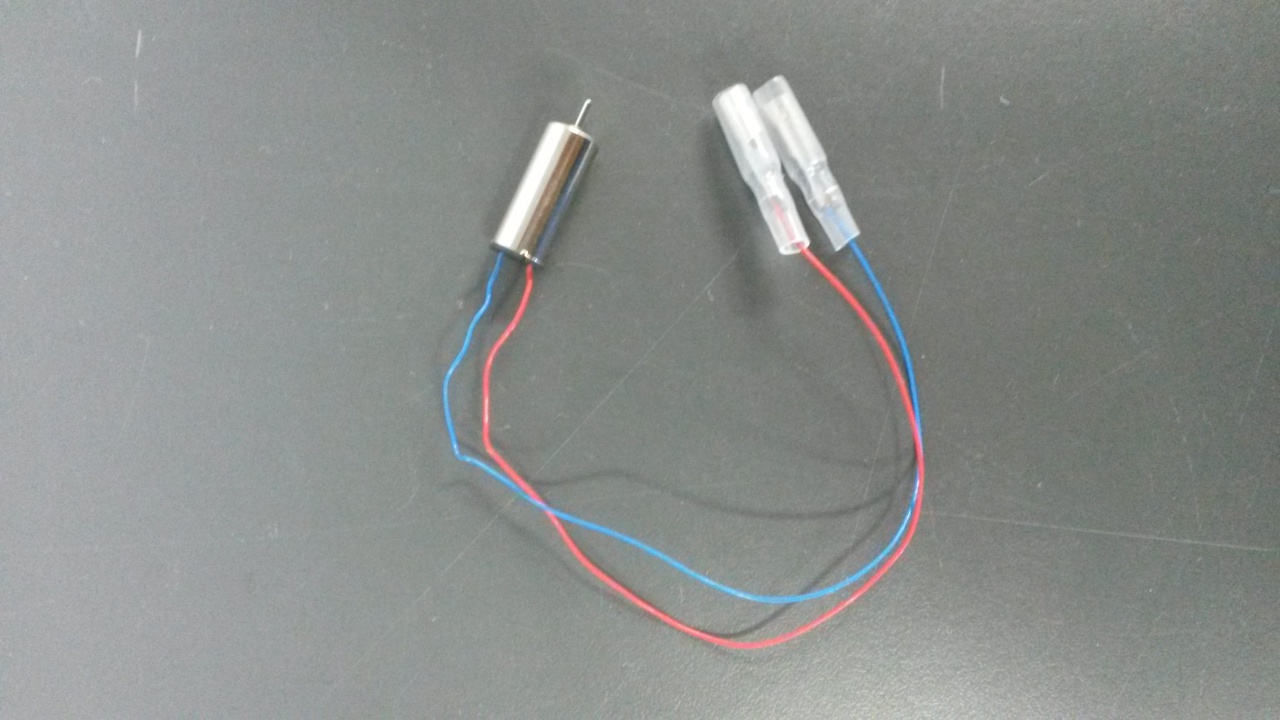
Moteur Coreless CL820

Batterie ZOP POWER Li-Po Battery
Si vous souhaitez voir le montage réaliser pour faire nos mesures sur ce moteur, vous pouvez vous rendre sur YouTube aux liens suivant:
- Montage avec l’alimentation de laboratoire
- Montage avec la batterie
b. Mesures effectuées
A l’aide d’une alimentation de laboratoire, nous avons testé le moteur sur une plage de tension comprise entre 0 et 3,7 V à vide.
p = U*I /ou/ p= V*A
1/Sans hélice
| U (V) | I (mA) | P (mW) |
| 0 | 0 | 0 |
| 1 | 50 | 0,05 |
| 2 | 80 | 0,16 |
| 3 | 110 | 0,33 |
| 3,1 | 110 | 0,341 |
| 3,2 | 110 | 0,352 |
| 3,3 | 120 | 0,396 |
| 3,4 | 120 | 0,408 |
| 3,5 | 130 | 0,455 |
| 3,6 | 130 | 0,468 |
| 3,7 | 135 | 0,4995 |
Voici les courbes qui montrent nos résultats
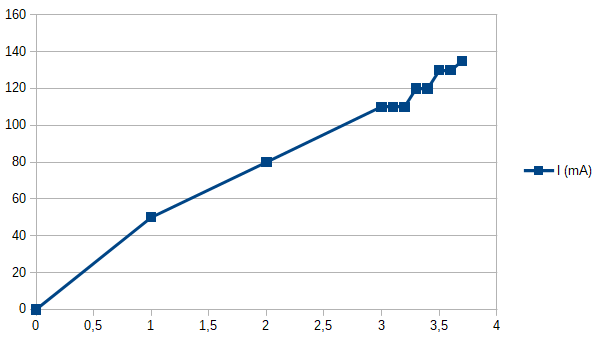
Intensité en fonction de la Tension (moteur à vide)
Au travers de cette première courbe nous pouvons remarquer que le moteur Coreless CL820, n’a pas un grande intensité lorsqu’il est à vide.
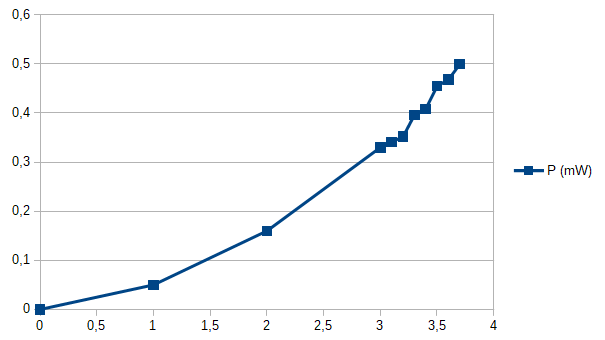
Puissance en fonction de la Tension (Moteur à vide)
A vide, on peut voir que le moteur consommes très peu d’énergie (car le couple résistant est très faible).
On peut en conclure que la puissance et l’intensité sont fortement influencées par la tension du circuit et le fait qu’il y est ou non du couple résistant ajouté à ce moteur.
2/Avec l’hélice
| U (V) | I (A) | P (W) |
| 0 | 0 | 0 |
| 1 | 0,49 | 0,49 |
| 2 | 1,220 | 2,44 |
| 3 | 2,140 | 6,42 |
| 3,1 | 2,200 | 6,82 |
| 3,2 | 2,300 | 7,36 |
| 3,3 | 2,340 | 7,722 |
| 3,4 | 2,460 | 8,364 |
| 3,5 | 2,520 | 8,82 |
| 3,6 | 2,620 | 9,432 |
| 3,7 | 2,720 | 10,064 |
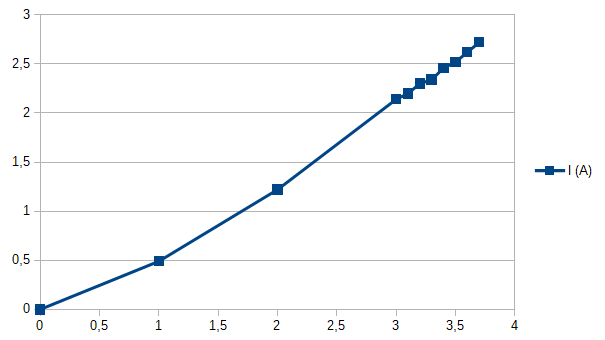
Intensité en fonction de la Tension (Avec l’hélice)
Contrairement à tout à l’heure, lorsque que le moteur à du couple résistant, son intensité est augmenté. Pour montrer que le moteur à un plus grande intensité lorsqu’on lui applique du couple, tout à l’heure nous mesurions l’intensité en milliampère soit (10^(-3)) par rapport à maintenant ou nous mesurons cette dernière en ampère.
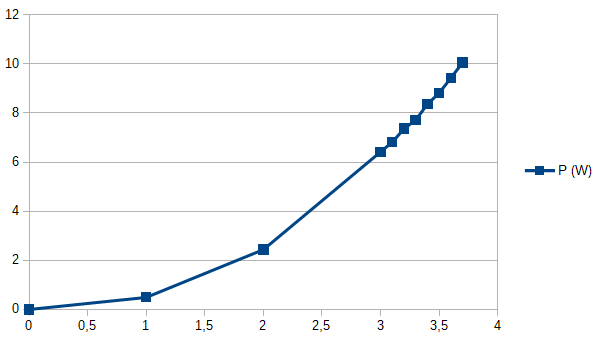
Puissance en fonction de la Tension (Avec l’hélice)
En conclusion, nous pouvons qu’avec l’hélice, on peut voir que le moteur consomme nettement plus d’énergie (car le couple résistant est important, voir proche de la puissance nominale). Cela signifie que le moteur à besoin d’une hélice pour atteindre sa puissance nominale.
3/Vitesse de rotation
Nous avons également mesuré la vitesse de rotation avec différentes hélices :
Comme tous à l’heure, pour mesurer cette vitesse de rotation nous avons utilisé un tachymètre. Pour ceux qui n’aurais pas vu plus haut dans nôtre article ce à quoi ressemble un tachymètre, nous vous remettons ce à quoi il ressemble.
Tachymètre, permettant de mesurer la vitesse de rotation de nos moteurs en RPM.
| Hélices testées | Batterie | Poste de mesure |
| Hélice Rouge (King Kong)
Diamètre 66 mm |
23 200 rpm | 23 200 rpm |
| Hélice Orange (Ladybird-Z-01)
Diamètre 55 mm |
28 100 rpm | 27 100 rpm |
On peut remarquer que sur les deux hélices testées, l’une se déplace entre 4000 et 5000 tour par minutes plus vite que l’autre. Les quatre mesures de vitesse ont été réalisées à 3,7 V que ce soit sur la batterie ou avec l’alimentation de laboratoire.
En conclusion, nous allons utilisé le moteur Coreless CL820 pour la réalisation de notre de maquette de lanceur.
