Le ballon captif est-il l’appareil le plus rentable ainsi que le plus simple pour faire des thermographies aériennes ?
6.2 Analyse du besoin
-La thermographie aérienne sert à réaliser des cartographies thermiques de toitures de bâtiments de grande hauteur.

Plus la couleur est sombre, plus c’est froid (pas de déperdition thermiques), plus la couleur est claire, plus c’est chaud (déperdition de chaleur)
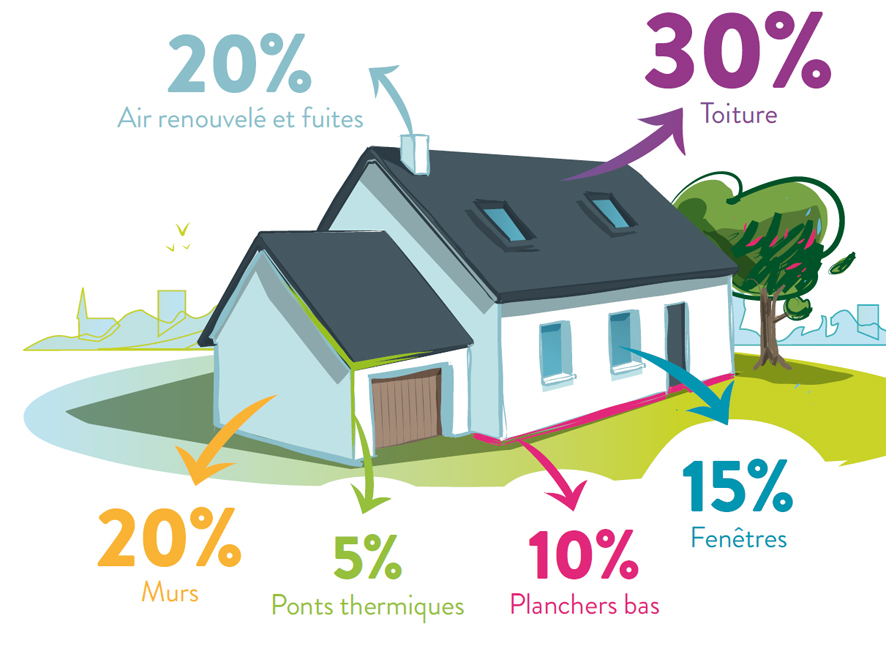
Schéma de pourcentage de déperdition de chaleur sur une maison mal isolée
Source : www.agglo-carene.fr/1347365191639/0/fiche___actualite/&RH=OPAH
-La thermographie aérienne sert également à réaliser des détections de cavités souterraines, des détections de fuites hydrauliques souterraines importantes, des contrôles de centres d’enfouissement recherche de pollutions sur terre et en mer.
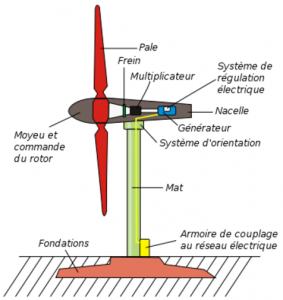
Analyse du système
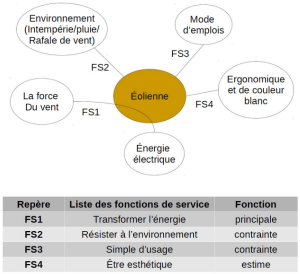
FS1 : Permettre à un opérateur d’effectuer des relevés de thermographie infrarouge sur une station de ski.
FT2 : Transporter, orienter et piloter une caméra thermique infrarouge.

Ballon captif blanc, nacelle noire sous le ballon contenant une caméra à thermographie, relié à un treuil par un câble
FT4 : Relever la position géographique.Ballon captif de thermographie (Source : http://www.thermocontrol.fr/02-IMAGES/05-Image-AERIENNE/P3300028.jpg)
Choix du ballon captif
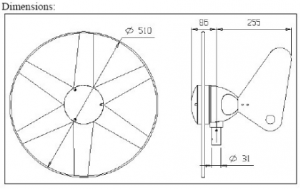
Une solution technique qui a été retenu par le constructeur est l’utilisation du ballon « Gélule 2 » car il permet de transporter une masse totale de 3,7 kg ; cette masse équivaut à la somme des masses de la caméra, des systèmes de fixation qui fait 1,7 kg, il faut y ajouter celle du câble et de la nacelle, qui fait 3,7 kg.
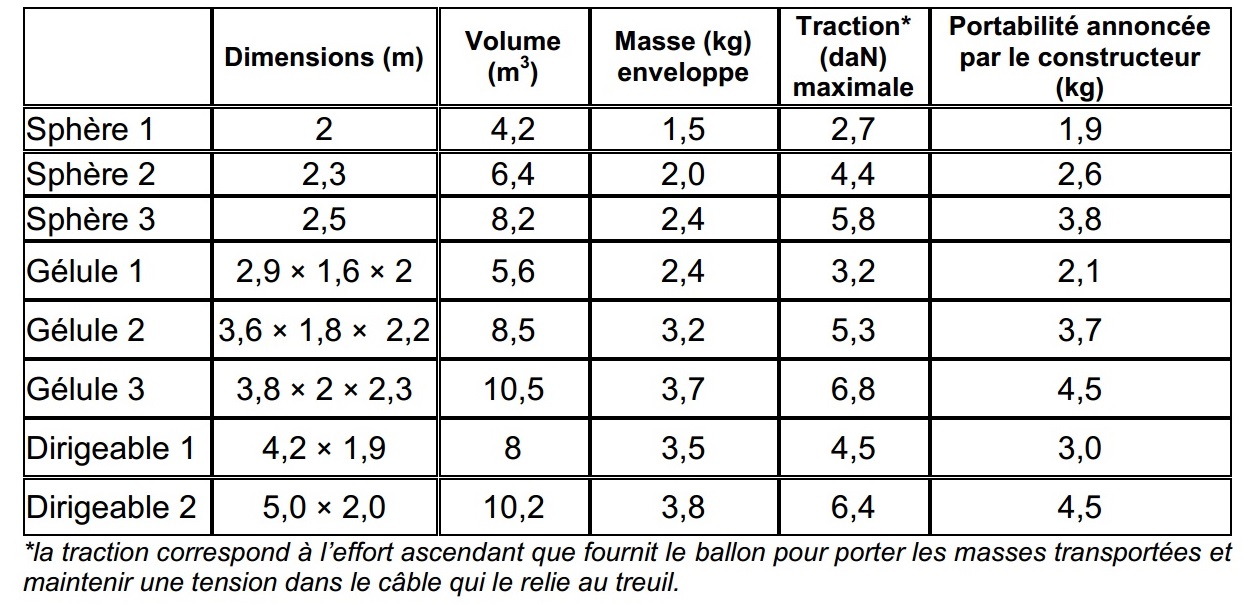
Dimensions, caractéristiques et performances ( en plaine) des différents ballons captifs
(Source : Bac 2013 – Sciences de l’ingénieur )
Afin de réduire son impact environnemental, le système choisi est un ballon sphère car, contrairement au ballon dirigeable, il est peu coûteux et facilement transportable.
Le treuil reste immobile sur le sol, le ballon se dirige selon une trajectoire strictement verticale la caméra suit la direction du ballon et elle sera dirigé a distance,
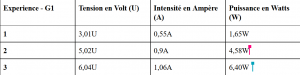
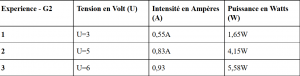
La tension moyenne est de 12V pour le moteur. La vitesse angulaire à la sortie du moteur est réduit par un réducteur à engrenage et une transmission par poulies crantées. Pendant une montée, une simulation a permis de déterminer 900 joules d’énergie consommée. Le rendement du variateur de vitesse est à peu près égal à 100%. La consommation d’énergie en termes de vitesse est donc négligeable.
Les différent matériaux utilisés sont le carbone, l’aluminium, l’acier inoxydable, fibre de verre.
Evolution possible du ballon captif
Les évolutions possibles pouvant être apportées, sous forme fonctionnelle du système, seraient d’ajouter un moteur sur le ballon qui permettrait de le diriger à distance à l’aide d’une télécommande sans fil, d’augmenter l’autonomie de la caméra.
Comparaison du Ballon captif, à différents moyens de transport
|
Type
|
alimen-tation
|
Coût
|
Consommation
|
Niveau sonore
|
Hauteur de prise de vue
|
Émission de CO²
|
Type de mesures
|
|
|
|
Hélicoptère léger (2/3 places)
|
pétrole
|
250 € / h
chère
|
30 à 40 litre / h
( polluant )
|
70 dB à 500 m
(bruyant)
|
Mini 400 m
(grande hauteur)
|
Oui
|
Toitures sur grande zone
|
|
|
|
Hélicoptère mono-turbine (5/6 places)
|
pétrole
|
500 € / h
(chère)
|
100 à 140 litre / h
( polluant )
|
70 dB à 500 m
(bruyant)
|
Mini 400 m
(grande hauteur)
|
Oui
|
Toitures sur grande zone
|
|
|
|
Avion de tourisme
|
pétrole
|
110 € / h
(chère)
|
27 litre / h
( polluant )
|
70 dB à 500 m
(bruyant)
|
Mini 400 m
(grande hauteur)
|
Oui
|
Toitures sur grande zone
|
|
|
|
U.L.M
|
pétrole
|
110 € / h
(chère)
|
27 litre / h
( polluant )
|
35 dB
à 500 m
(bruyant)
|
Mini 400 m
(grande hauteur)
|
Oui
|
Toitures sur grande zone
|
|
|
|
Ballon Captif
|
/
|
30 € / h
(peu
chère)
|
0 litre / h
( non polluant )
|
0 dB à 0M
(pas bruyant)
|
Max 150m
(petite hauteur)
|
Non
|
Toiture, façades et sites difficiles d’accès
|
|
|
Vue d’un ballon captif pour thermographie aérienne
[youtube http://www.youtube.com/watch?v=3n3oKUNprVA]
Contrainte liée au Ballon captif
le ballon captif doit pouvoir résister a des températures très froide, à résister aux vents puissants, il ne doit pas s’envoler et doit être maîtrisé au sol et que le système de retenue soit résistant est maniable.
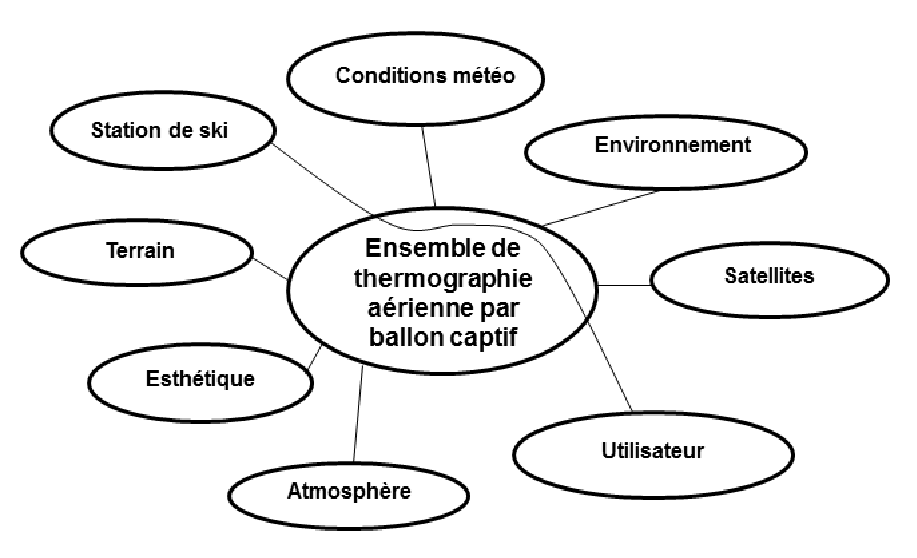
Diagramme pieuvre d’un ballon captif à thermographie aérienne
Station de ski : FS1 : permettre à un opérateur d’effectuer des relevés de thermographie infrarouge sur une station de ski.
Condition météo: FS2 : être utilisable sous certaines conditions météorologiques.
Terrain : FS3 : s’adapter au terrain d’évolution.
Atmosphère : FS4 : être utilisable quelle que soit l’altitude du terrain.
Esthétique : FS5 : être esthétique (aspect des matériaux, formes, couleurs, etc.).
environnement : FS6 : respecter les normes environnementales.
Satellites : FS7 : connaître les coordonnées G.P.S de la prise de vue
Lien vers le sujet de bac de SCIENCES DE L’INGENIEUR