
Dans le cadre d’une étude de cas ou d’un mini-projet, il peut être utile pour les élèves de Sciences de l’Ingénieur de concevoir et réaliser rapidement des pièces avec une imprimante 3D. Le logiciel BlocksCAD peut être utile dans ce cas.
Aujourd’hui le logiciel SolidWorks est très utilisé au lycée mais pour pour de nombreux élèves, concevoir une pièce avec ce logiciel demande beaucoup de temps si on ne les guide pas de manière très directive. Et comme ce logiciel est payant, il ne peuvent pas poursuivre leur travail de conception en dehors des salles SI.

Logo du logiciel BlocksCAD (source : blockscad.einsteinsworkshop.com)
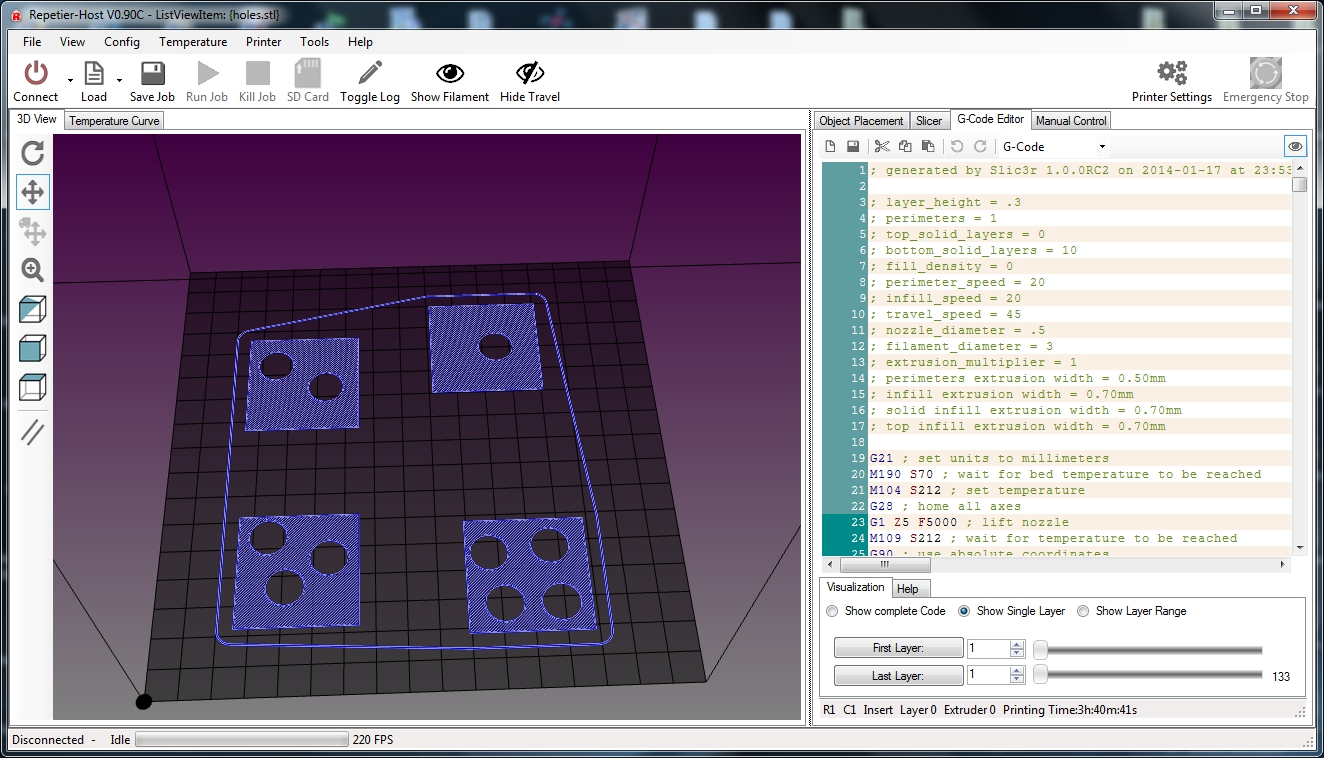
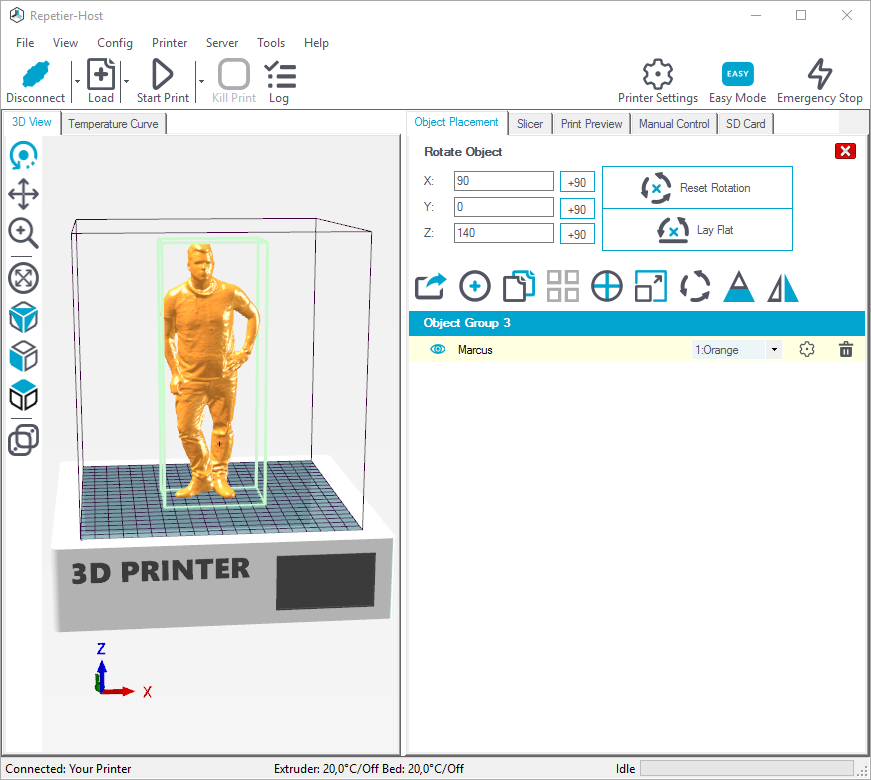
J’ai découvert récemment le logiciel BlocksCAD qui me semble très intéressant. C’est un logiciel développé par Einstein’s Workshop, un centre de formation pour enfants dans la région de Boston aux Etats Unis. Le développement a été financé sous-licence libre grâce à une campagne de crowdfunding (financement participatif) en 2013 et 2014. BlocksCAD est basé sur Blockly qui est une brique logicielle conçue en 2013 par Google pour permettre le développement de logiciels pédagogiques d’apprentissage de la programmation. Blockly permet de concevoir simplement un logiciel où la conception se fait graphiquement en assemblant des blocs, comme avec Scratch ou AppInventor. Blockly permet de générer du code à partir de cet assemblage de blocs. Ici BlocksCAD génère une modélisation en 3D en utilisant le code du logiciel OpenSCAD qui est un logiciel libre de modélisation en 3D (à partir de scripts). Les modèles créés avec BlocksCAD peuvent être exportés au format OpenSCAD, mais ce n’est pas sa fonction principale. Par défaut BlocksCAD travaille avec des fichiers au format XML et génère un fichier au format STL (STereoLythography) qui est devenu le format le plus courant pour les logiciels d’impression 3D (comme RepetierHost qui est un logiciel libre).
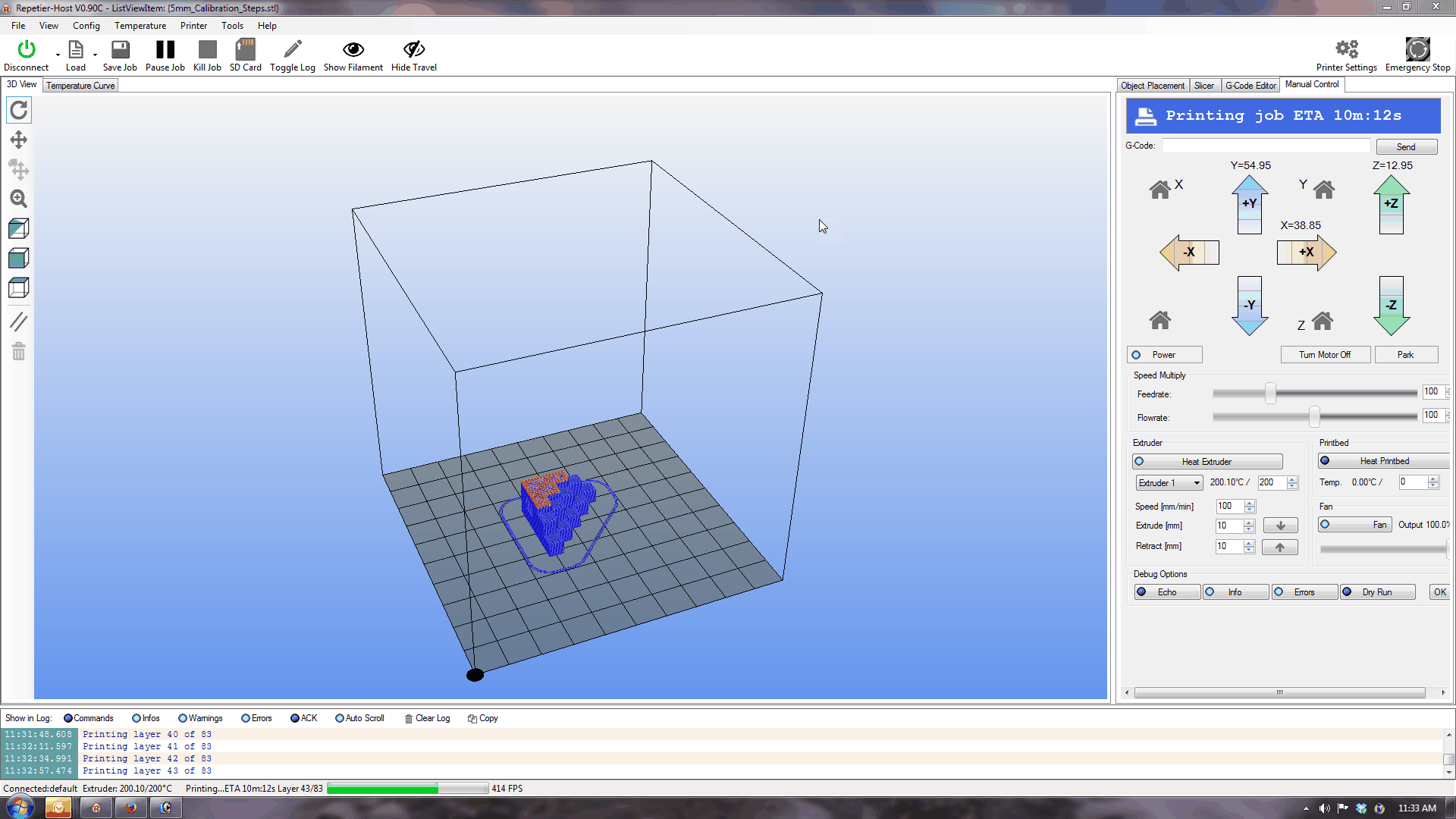
BlocksCad m’a permis de concevoir et fabriquer des mécanismes à usage pédagogiques. Il s’agit de vrais mécanismes entièrement imprimables en 3D, constitués de pièces mobiles en rotation et en translation, avec des liaisons pivots et glissières, avec l’utilisation d’une roue dentée, d’une crémaillère, … avec un entrainement motorisé, … Mais attention, pour imprimer toutes les pièces d’un petit mécanisme, il faut près de 3h en moyenne. Cela nécessite généralement de l’ordre de 10 m de fil en PLA de 1,75 mm. A raison de 25 € la bobine de 1kg (soit 330 m), cela revient à moins de 1 euro le mécanisme.
Voici trois exemples que j’ai mis au point. Je les ais fabriqués et ils fonctionnent. Je publie ici des images et des vidéos issus des modèles 3D. Des photos et des vidéos des systèmes imprimés seront publiées prochainement.
1) Une pièce de base pour la construction de mécanismes : une barre avec des trous et un connecteur intégré à une extrémité
J’ai essayé de faire une conception paramétrique d’une pièce de base constituée d’une barre avec des trous (comme les jeux Mécano) avec un connecteur intégré pour obtenir des liaisons pivot : on peut choisir notamment le nombre de trous (n), la largeur de la pièce (b), la hauteur des deux premiers cylindres constituant les connecteurs (h1 et h2), … J’ai ajouté aussi un trou avec un méplat pour le moteur.
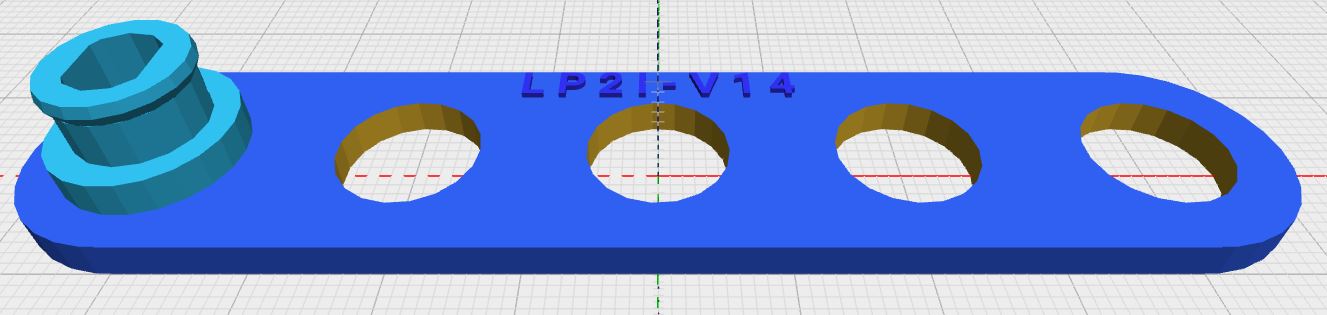
Exemple de pièce conçue avec BlocksCAD. Les couleurs ont été ajoutées à des fins pédagogiques (Source : LP2I)
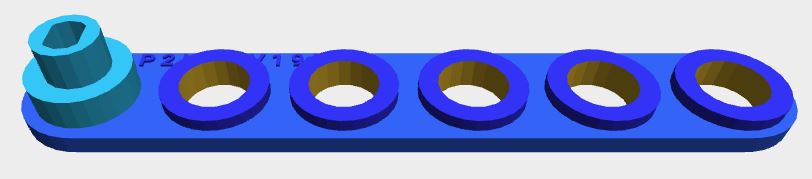
L’ensemble est facilement paramétrable (Source LP2I)
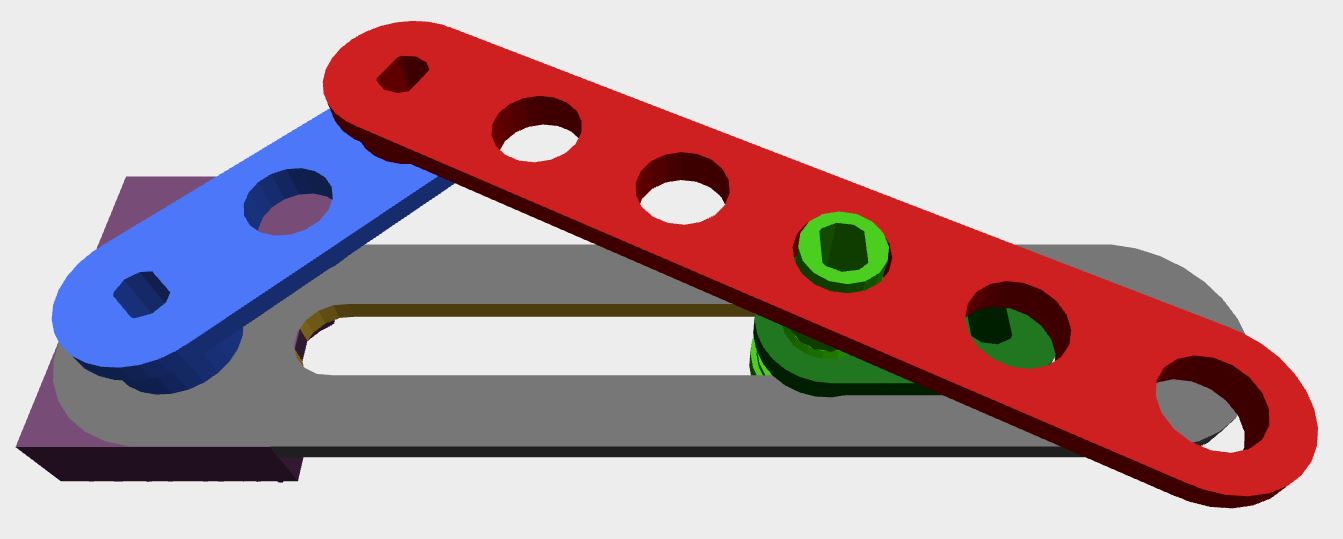
2) Mécanisme bielle-manivelle
A partir de cette pièce de base j’ai conçu et imprimé en 3D un système bielle-manivelle à usage pédagogique. On peut notamment changer la course en connectant la bielle (en rouge) sur deux trous de la manivelle (en bleu). On peut allonger chacune des pièces pour y connecter d’autres pièces.
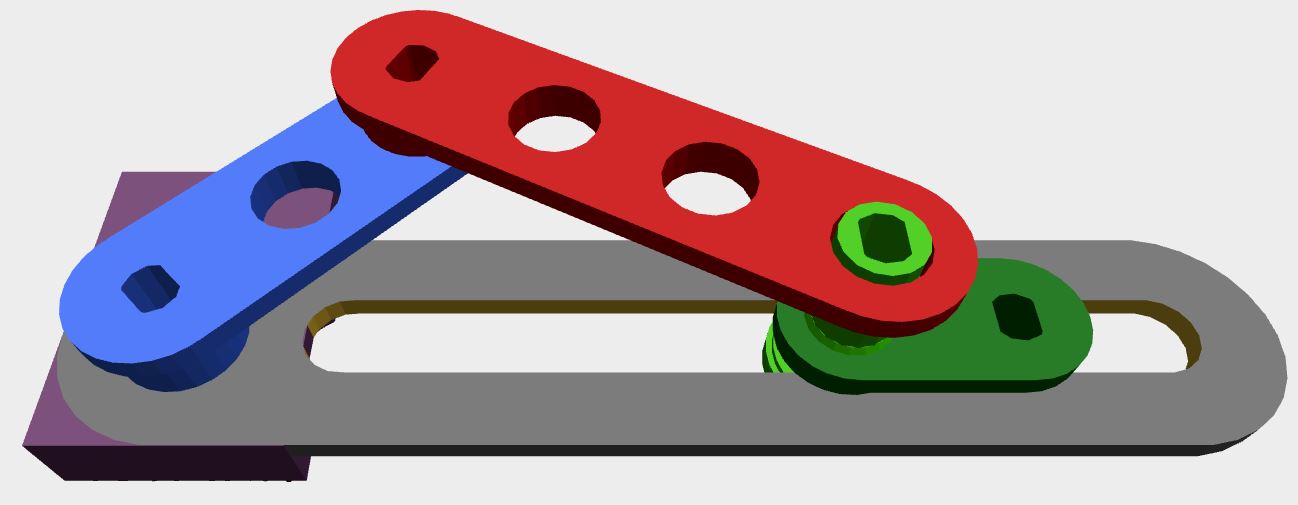
Système bielle-manivelle motorisé, conçu avec BlocksCad (Source : LP2I)
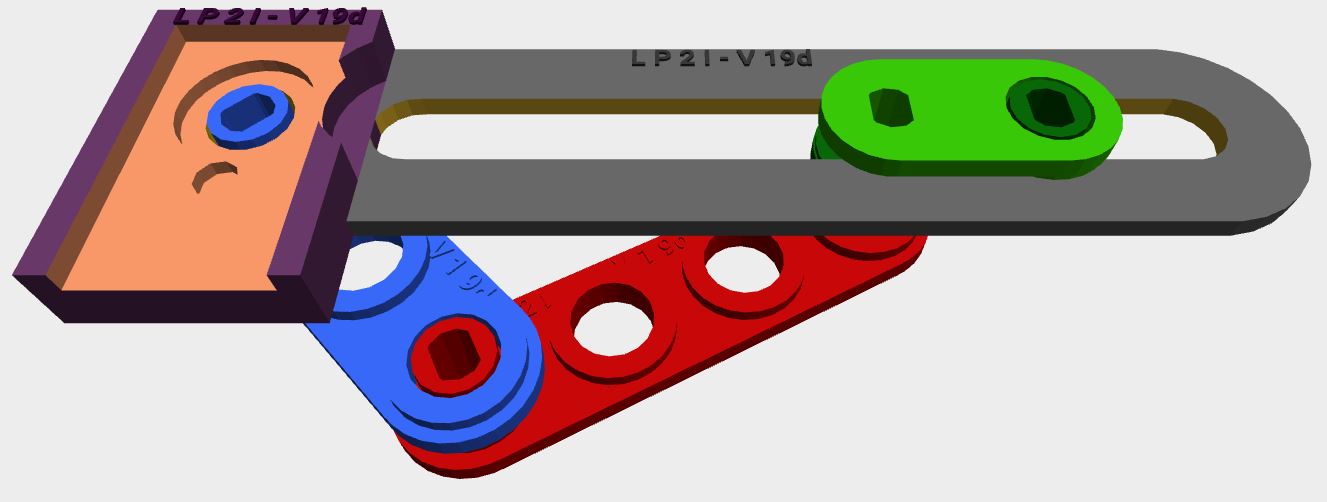
Arrière du système bielle-manivelle motorisé, conçu avec BlocksCad. Le moteur peut se fixer sur la partie orange. (Source : LP2I)
Le même mécanisme avec la pièce rouge rallongée (5 trous au lieu de 3). Il suffit de changer la valeur du nombre de trous pour cette pièce dans la modélisation BlocksCad (Source : LP2I)
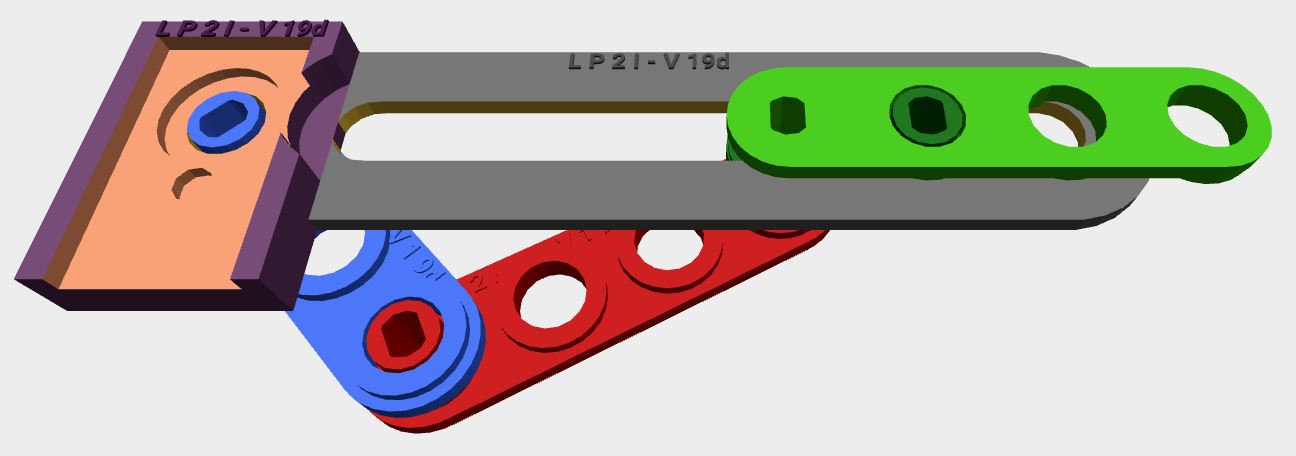
On peut aussi allonger la pièce verte en translation pour pouvoir y connecter un autre mécanisme. Il suffit de changer la valeur du nombre de trous pour cette pièce. (Source LP2I)
[youtube https://www.youtube.com/watch?v=NPRhklPRen0]








{kind=link}