Dans cette étude de cas, nous allons étudier la passerelle d’accès au robot coaster.
Nous allons essayer de répondre a la problématique suivante :
Comment piloter précisément et efficacement les mouvements complexes d’un objet technique ? Comment décrire les chaînes d’information et d’énergie de ces systèmes ? Quelles sont les solutions techniques qui permettent de réaliser les fonctions nécessaires ?
Pour cela, nous allons d’abord analyser les besoins, puis analyser le système de la passerelle d’accès.
Voici le schéma de la frontière étudiée :
Frontière déterminée à partir d’une image extraite du sujet de bac de S.I 2008
I – Analyse des besoins
Les besoins de la passerelle d’accès au robot coaster sont :
– Permettre à l’utilisateur d’accéder au robot en sécurité. Ceci est réussi entre autres grâce à des rambardes latérales, une butée intérieure, des bords sensibles et un electro aimant.
– Se rétracter avant le démarrage et s’avancer à la fin de l’attraction dans un temps donné.
– Faire un mouvement de translation fluide longitudinalement et latéralement.
– Déterminer lorsque le bras est en “home position” afin de se mouvoir sans risque.
– Permettre au robot coaster de se synchroniser et de se lier aux autre robot coaster pour commander les appareils électrique (ex: harnais de protection)
II – Analyse du système
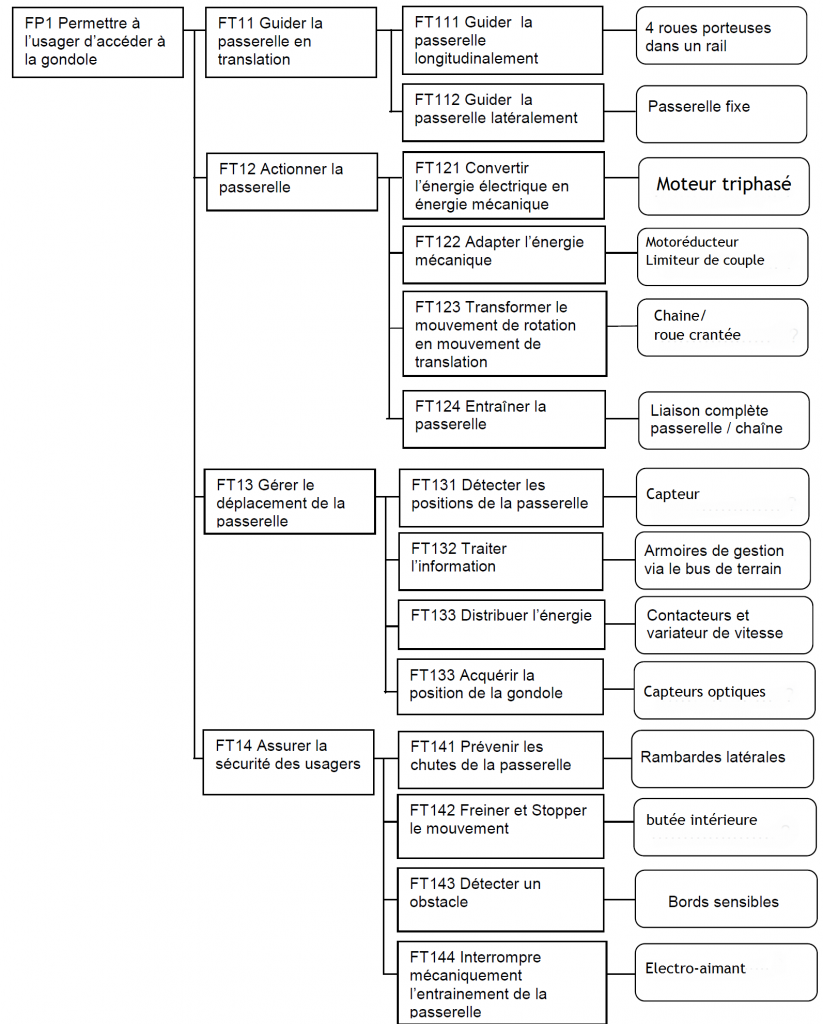
Diagramme FAST extrait du sujet de bac de S.I. 2008
Diagramme FAST de la passerelle d’accès au robot coaster :
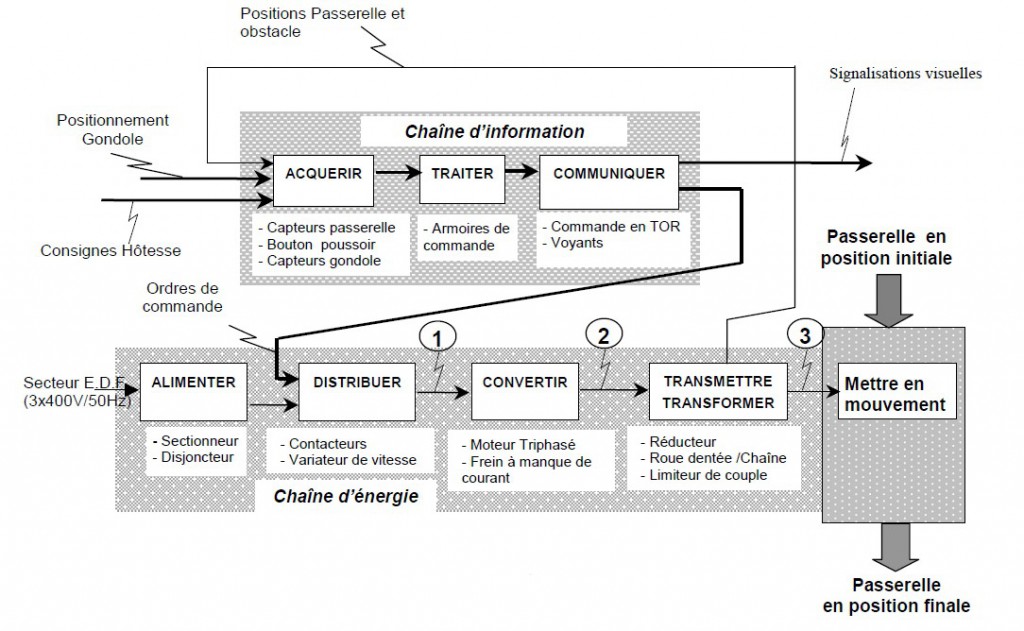
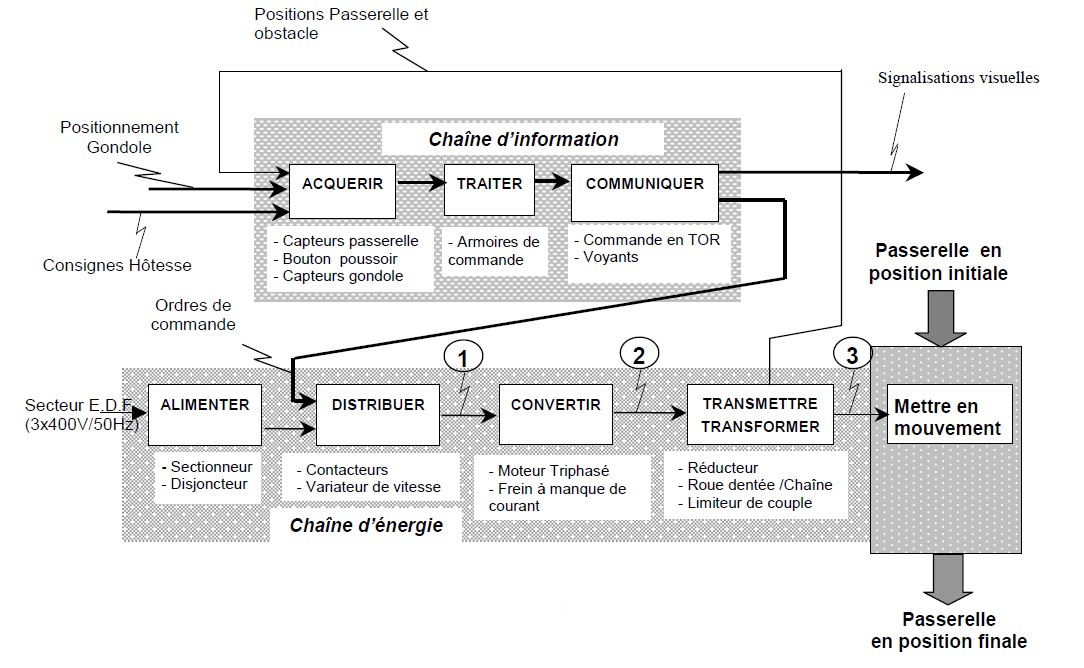
Chaine d’information et d’énergie – Sujet bac S.I. 2008
Schéma du mouvement de la passerelle d’accès au robot coaster :
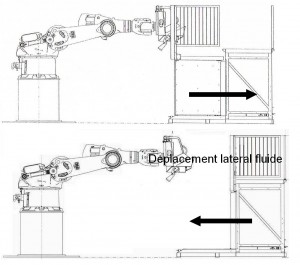
Image extraite du sujet de bac de S.I. de 2008
Pour se déplacer précisément et efficacement sans atteindre à la sécurité de l’utilisateur, la passerelle répond a différentes contraintes :
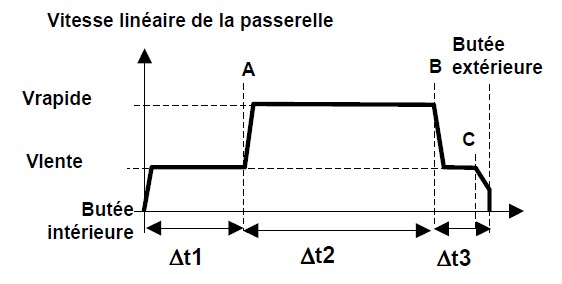
Elle ne se déplace que lorsque le bras est en “home position”, c’est à dire à l’arrêt, comme sur le schéma ci-dessus. Pour des raisons de praticité, le déplacement aller ou retour de la plateforme doit se faire en moins de 8 secondes. On peut voir sur le schéma ci-dessous comment est répartie cette vitesse.
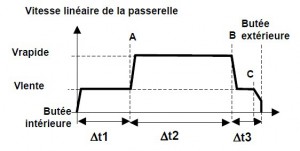
Schéma de l’évolution de la vitesse de la passerelle – Sujet bac S.I. 2008
t1 = 2 secondes, t2 = 5 secondes, t3 = 1 seconde.
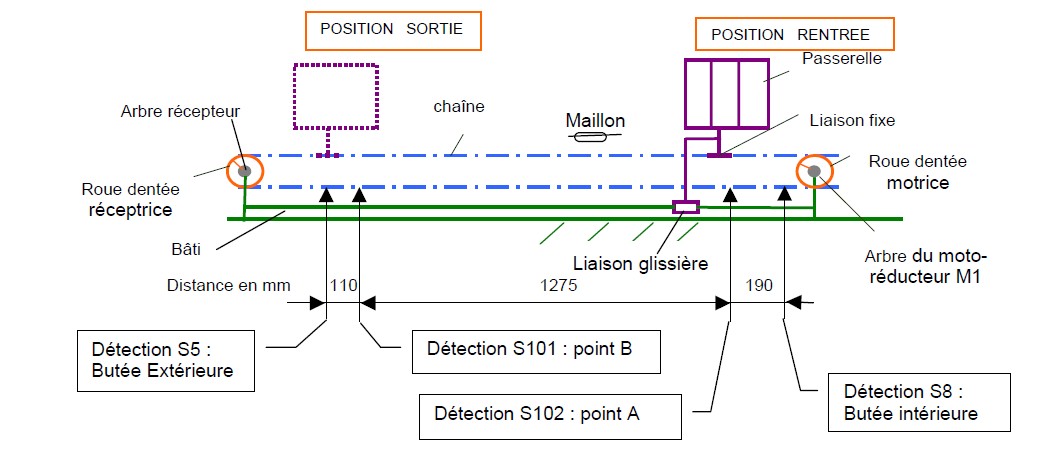
La sortie de la passerelle se fait en plusieurs temps :
- démarrage et déplacement en vitesse lente jusqu’au point A
- déplacement en vitesse rapide jusqu’au point B.
- déplacement en vitesse lente jusqu’au point C (vitesse lente = 100mm/s).
- déplacement en « roue libre » jusqu’en butée extérieure.
Les points A et B sont associés à des capteurs qui déterminent quand changer la vitesse.
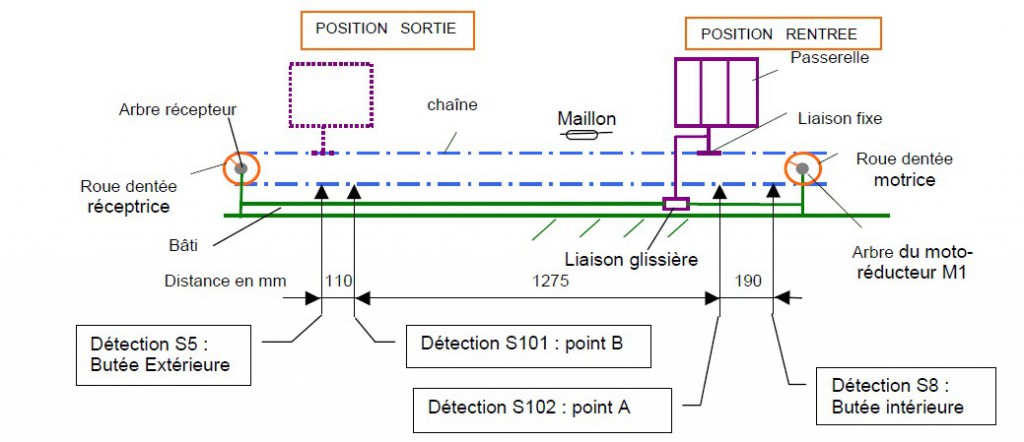
Schéma cinématique de la passerelle d’accès – Sujet bac S.I. 2008
Grâce a ce schéma, on peut comprendre précisément comment fonctionne la passerelle.
La passerelle est déplacé grâce à une chaîne qui est activé par une roue dentée motrice, elle même activée par un moteur (triphasé*). Elle est fixée grâce à une liaison fixe sur la chaîne, et elle à une liaison glissière avec un rail situé sur un bâti.
On retrouve ici les point A et point B, qui correspondent aux emplacements des capteurs, pour déterminer la vitesse du moteur qui activera la chaîne.
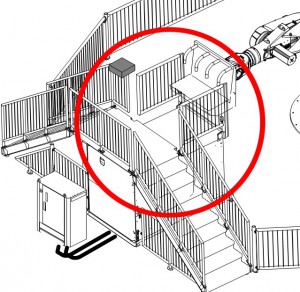
Comme nous avons pu le voir à la sortie au futuroscope, la passerelle possède un bras qui s’accroche au robot lorsqu’il est en Home Position. Ce bras permet l’alimentation électrique et sert de capteur pour déterminer si le robot est bien a l’endroit ou il devrait être.
Pour déterminer lorsque le bras est en “home position”, des capteurs optiques sont positionnés sur la passerelle, et des réflecteurs sur la gondole.
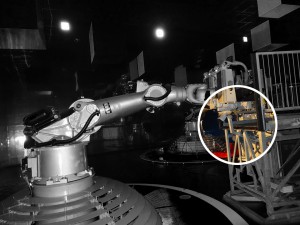
Photo du robotcoaster au Futuroscope Photo LP2I 2014

Vidéo amateur de l’attraction Danse avec les Robots
Les solutions techniques qui permettent de réaliser les fonctions nécessaires sont :
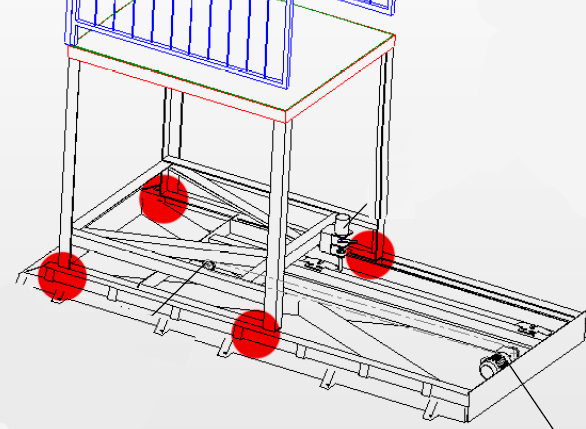
- placer les 4 roues porteuses réceptrices dans un rail. (FT11)
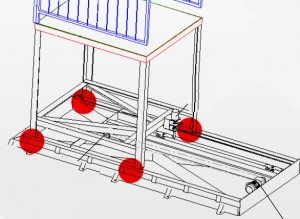
Schema de la passerelle – Sujet bac S.I. 2008.
En rouge, les emplacements des 4 roues réceptrices
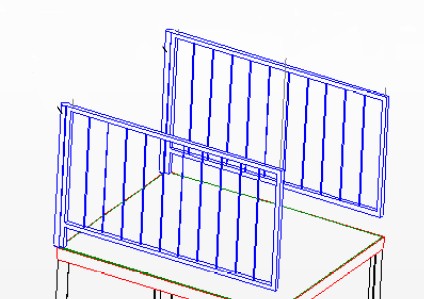
- Placer des rambardes afin de permettre l’accès aux sièges en toute sécurité (FT14)
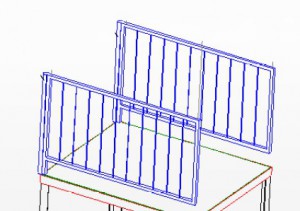
Schéma des rembardes – Sujet bac S.I. 2008
- Utiliser un moteur triphasé
Voilà comment fonctionne la passerelle d’accès au robot coaster de l’attraction Danse Avec Les Robots.
*triphasé : système constitué de trois courants (ou tensions) sinusoïdaux de même fréquence de même amplitude qui sont déphasés entre eux.