
-
Compte-rendu de l’étude d’un store banne
- Constitution de l’équipe et choix du système

Store terrasse coffre entier motorisé et manuel gris
- Equipe
- Marguerite Anceaume
- Félix Hiéronimus
- Oleksiy Stepanishchev
- Léandre Ripolles
- Système choisi
- Equipe
- Analyse du besoin et analyse externe du système
- Description du besoin
- Protéger de la pluie et du soleil en créant de l’ombre
- Principales fonctions de service du système et contraintes
- Être silencieux
- Prendre peu de place lorsqu’il est rangé
- Se déplier rapidement et de manière autonome
- Pouvoir être déplié même lors d’une coupure de courant avec un système manuel de secourt
- Supporter les chocs de la pluie
- Couvrir le plus de place possible pour protéger la plus grande surface possible
- Être imperméable
- S’ouvrir automatiquement et sur une certaine surface quand il y a du soleil
- Description du fonctionnement, vu de l’utilisateur
- Télécommande à distance + interrupteur qui permissent contrôler les mouvements du store :
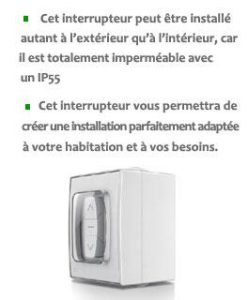
Interumpteur imperméable Mural
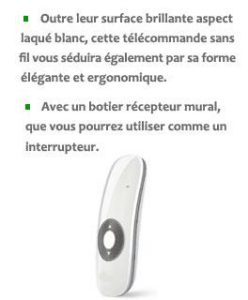
Télécomande sans fil
- Stopper le store
- Le faire monter ou le faire descendre (contrôler l’inclinaison)
- Contrôler le déroulement du storeManivelle démontable pour permettre à l’utilisateur de dérouler le store manuellement lorsqu’il y a une panne énergétiqueVidéos sur le fonctionnement du store terrasse motorisé :
- Télécommande à distance + interrupteur qui permissent contrôler les mouvements du store :
- Description du besoin
- Constitution de l’équipe et choix du système
Etude de l’axe 5 ( poignet ) du robot Kuka
Compte-rendu de l’étude du dernier axe du robot kuka
– Système choisi
– Robot Kuka KR500-3.
Description du besoin

Il est destiné à mouvoir un ou plusieurs objets ou personnes sur 6 axes différents. Il est utilisé dans les industries pour la fabrication d’objets d’une façon précise et rapide et, aussi dans des attractions pour une utilisation public (La Danse des Robots)
Principales fonctions de service du système et contraintes.
Principales fonctions de services:
– Mouvoir un objet (éventuellement une nacelle prévue pour transporter 2 personnes dans le cas de l’attraction “La Danse des Robots” du Futuroscope) depuis pratiquement n’importe quelle position à quasiment n’importe quelle autre à l’intérieur du rayon d’action du robot (limité tout de même par le poids de l’objet et les hypothétiques obstacles autours de celui-ci).
-Pouvoir programmer les mouvements du robot facilement pour qu’il puisse reproduire des séries d’actions préenregistrées.
-Pouvoir contrôler la célérité des mouvements selon le besoin de l’utilisateur (exemple: Sur une chaîne d’assemblage, selon sa cadence; Pour la Danse des Robots, pour varier les sensations ressenties par l’utilisateur)
-(Essentiellement pour la Danse des Robots ou le travail à la chaîne): Pouvoir synchroniser le robot avec d’autres robots Kuka KR500-3 et les faire travailler de concert.
Contraintes du système:
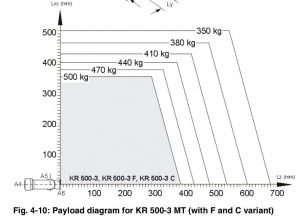
- Doit supporter comme poids maximum de 500 à 350 kilogrammes selon l’extension du bras.
- Ne doit pas mettre en péril la sécurité de son utilisateur en dehors des risques spécifiés
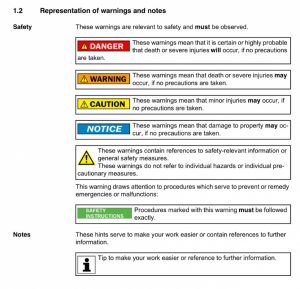
Précautions quand à l’utilisation et à la manipulation du robot Kuka, sous formes de précisions dans la documentation du robot.
Description du fonctionnement, vu de l’utilisateur :
Vu de l’utilisateur, le robot Kuka KR500-3 bouge sur 6 axes différents, selon le programme qu’il suit. Il permet ainsi de déplacer sa tête dans de très nombreuses positions et orientations et ainsi de manipuler des objets (ou la nacelle dans le cas de l’attraction La Danse des Robots) aisément et selon les besoins de son utilisateur.
Analyse partielle d’une chaîne d’énergie
- Description d’une chaîne d’énergie
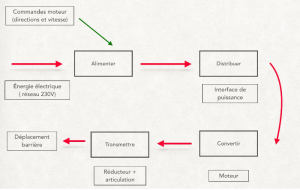
analye fonctionel du robot kuka
- Analyse de solutions techniques
Les solutions techniques permettant la transmission de l’énergie mécanique du moteur jusqu’aux axes malgré la place restreinte et les angles dans la structure du robot sont des systèmes de courroies et de poulies.
Analyse et modélisation d’une fonction cinématique du système
- Choix d’une fonction permettant de transmettre un mouvement
Un moteur électrique actionnant une poulie qui entraîne une courroie dirigée par d’autres poulies jusqu’à entraîner la rotation de l’axe du robot Kuka.
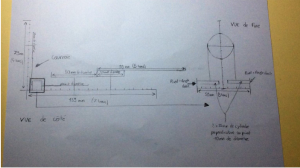
Modélisation, simulation et réalisation d’un dispositif expérimental
Croquis :
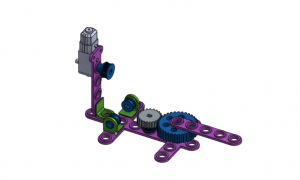
Modélisation avec Onshape :
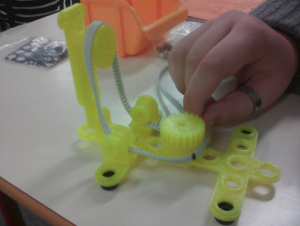
Système imprimé avec une imprimante 3D :
Le LP2I crée un FabLab innovant dans sa classe du futur
Le Lycée Pilote Innovant International a inauguré des nouvelles salles dédiées au projet Futur Classroom Lab (FCL) dans le cadre d’un projet européen d’European Schoolnet. Elles sont progressivement équipées de moyens innovants qui permettent dors et déjà de multiples expérimentations pédagogiques pour faire évoluer les pratiques vers les compétences du 21ième siècle. Par exemple, des chaises à roulettes (fournies par notre partenaire DPC) permettent d’imaginer de nouveaux scénarios pédagogiques où les élèves sont plus mobiles, des murs sont transformés en tableaux blancs géants, un système de visioconférence (offert par notre partenaire Polycom) permet de communiquer partout dans le monde. Cette classe du futur correspond à 200 m² équipés et structurés pour enseigner et apprendre autrement.
Un des espaces de cette FCL est dédié au travail créatif. Il est donc logique d’y implanter un FabLab permettant de concevoir et fabriquer des objets. Sa création est menée par une douzaine d’élèves dans le cadre d’Activités Complémentaires de Formation, encadrée par un enseignant en Sciences de l’Ingénieur. Mais le FabLab du LP2I s’adresse à tous les élèves et tout le personnel du LP2I. Tout le matériel nécessaire est mis à disposition, aussi bien les outils que les composants. Les solutions numériques modernes sont privilégiées : modélisation 3D, impression 3D, programmation de cartes électroniques de type Arduino, …
Le FabLab du LP2I ouvre ses portes une fois par semaine. Des débutants et des personnes plus expérimentées peuvent se rencontrer et faire vivre l’esprit des Makers, du Do It Yourself. C’est un nouvel espace propice à la découverte et à la création collaborative. Il peut aider les élèves à construire leur projet d’orientation dès la seconde.
Une des particularités de ce FabLab est de chercher des solutions techniques et pédagogiques facilement transférables dans la plupart des établissements scolaires, en France ou à l’étranger, en tenant compte de leurs contraintes financières, de leurs besoins pédagogiques, … L’imprimante 3D choisie est un modèle performant mais adapté aux débutants, livrée en kit pour 930 €. Les composants pour les projets sont standards et bon marché. Les logiciels utilisés sont gratuits, ouverts, et libres si possible : Onshape pour la modélisation 3D, Blockly Arduino pour la programmation, …
Un premier projet vient de commencer : concevoir et fabriquer des drones autonomes, à vocation pédagogique, et low cost. Un collège est déjà intéressé par ce projet, ainsi que deux FabLabs de Côte d’Ivoire.
Le Parc du Futuroscope est intéressé aussi pour renouveler son offre pédagogique en partenariat avec le FabLab du LP2I.
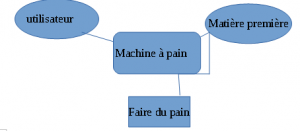
Analyse fonctionnelle de la machie à pain
1 Système choisi : Machine à pain

2 Analyse du besoin
2.1 Fonction globale
Cette machine est prévu pour faire pain, des gâteaux, de la confiture, de la patte à pain de manière autonome.
2.2 Fonctions de service et contrainte
-être simple d’emplois.
-répondre au programme demander.
-être autonome.
-résister à l’environnement.
-être esthétique.
-s’adapter au secteur d’alimentation en électricité.
3 Analyse du système
3.1 Fonctionnement, vu de l’utilisateur
Cette machine est équipé de 6 boutons poussoirs qui permettent à l’utilisateur de choisir les mode de cuisson. Il y a deux boutons pour gérer le minuteur de la machine, un bouton pour sélectionner les menu, un bouton pour faire brunir le pain, un bouton pour la gestion du poids et un bouton pour commencer a cuisson.
3.2 Matière d’œuvre et valeur ajoutée
La machine à pain transforme les ingrédients que nous lui avons ajoutée pour la transformer en pâte à pain qu’il cuis ensuite.
3.3 Flux
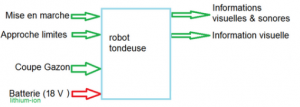
Seul le déplacement autonome du robot avec détection des obstacles et du vide est pris en compte dans ce schéma fonctionnel.

– Sur ce schéma fonctionnel on représente des flux d’informations (en vert ici) et des flux d’énergie (en rouge ici).
4 Quelques fonctions techniques et solutions techniques
4.1

Interface de dialogue- Fonction technique : Dialoguer avec l’utilisateur
– Solution technique : des boutons poussoirs, et des Leds permettent l’acquisition d’informations sur des choix de l’utilisateur (mode de fonctionnement) et d’informer l’utilisateur.
4.2 Alimentation
– Fonction technique : Alimenter en énergie électrique de manière constante
5 Impact environnemental
– La machine à pain utilise l’électricité que le temps de son utilisation
– La machine à pain est bruyante.
– La machine à pain utilise des matériaux électroniques
Evolution possible pour réduire sont impact :
– Réduction du bruit.
– Matériaux recyclable
Analyse fonctionnelle du vidéoprojecteur EMP-61
Système choisi : Vidéoprojecteur Epson EMP-61

Vidéoprojecteur vu de devant (source : LP2I)

Vidéoprojecteur vu de derrière (Source : LP2I)

vidéoprojecteur vu de haut (source : LP2I)
Ce vidéo projecteur est prévu pour faire grandir les images sur l’ordinateur et les projeter sur un écran plus grand.
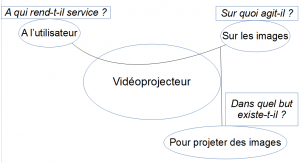
Diagramme “bête à cornes” (Source : LP2I)
Il possède plusieurs fonctions qui sont de :
-
Ne pas être très grand pour mettre sur table ou suspendre au plafond.
-
Pouvoir être commandé à distance.
-
Pouvoir changer la luminosité.
-
Pouvoir changer la distance focale.
-
Baisser vite la température
-
Ne pas être très bruyant.
-
Être simple d’emploi.
-
Avoir une grande qualité d’image
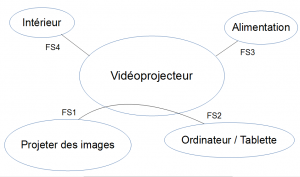
Diagramme pieuvre (Source : LP2I)
|
Repère |
Liste des fonctions de service |
Type de fonction |
|
FS1 |
Projeter les images reçues |
principale |
|
FS2 |
Être relié à un ordinateur ou une tablette |
principale |
|
FS3 |
Être alimenté sur secteur |
contrainte |
|
FS4 |
Rester à l’intérieur |
contrainte |
Le vidéoprojecteur possède 10 boutons poussoirs (alimentation, menu, source, volume haut/bas, pencher l’image vers le haut/vers le bas , échap, valider, aide).
Il possède également 13 connexions (trois RGB, RCA, deux HDMI, alimentation, quatre audio, vidéo, S-Vidéo).
Le vidéoprojecteur possède aussi une lampe (réglable par des objectifs)et des LEDs (température, lampe, statut).
Le vidéoprojecteur agit sur les images et sur la surface où il projette l’image. Lorsqu’il est allumé, on peut voir une image qui est sur un ordinateur mais pour un plus grand public.
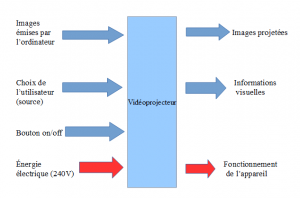
Sur ce schéma fonctionnel, on a représenté des flux d’informations (flèches bleues) et des flux d’énergie (flèches rouges). (Source : LP2I)
Quelques fonctions techniques et solutions techniques
Interface de dialogue
-
Fonction technique : Dialoguer avec l’utilisateur
-
Solution technique : des boutons poussoirs, et des LEDs permettent l’acquisition d’informations sur les choix de l’utilisateur et d’informer l’utilisateur.
Commande
-
Fonction technique : être commandé à distance
-
Solution technique : une télécommande avec des boutons poussoirs et un capteur infra-rouge pour donner et recevoir le signal. Il y a également un capteur infra-rouge sur le vidéo projecteur pour donner et recevoir le signal.
Dispersion thermique
-
Fonction technique : disperser la température
-
Solution technique : plusieurs ventilateurs pour évacuer la chaleur
Projection
-
Fonction technique : projeter l’image sur un écran avec une grande qualité
-
Solution technique : une lentille claire et une partie pour changer la distance focale
Analyse de la lampe
Le vidéoprojecteur peut envoyer des images sur un espace devant lui. Pour cela, il utilise une lampe, située dans sa partie avant.

Lampe du vidéoprojecteur (Source : Cdiscount)
Pour cela, le vidéoprojecteur enregistre l’écran de l’ordinateur grâce à un câble les reliant tous deux. Les images sont sous forme d’information électrique entre l’ordinateur et le vidéoprojecteur, puis ce dernier reconvertit le signal reçu en image qui ressort sous forme de lumière par la lampe.
Système de vidéoprojection (Source : Onisep)
Impact environnemental
Il y a quelques pièces mécaniques du vidéo projecteur sont en plastique, issu du pétrole, une ressource en voie d’épuisement.
-
Le vidéo projecteur ne fait pas de bruit
-
Le vidéo projecteur utilise beaucoup de composants électroniques. La fabrication des composants électroniques à fort impact environnemental (consommation d’énergie, d’eau, de produits chimiques, …). De plus ces composants se recyclent difficilement.
-
Le vidéo projecteur consomme beaucoup d’énergie
Evolution possible pour réduire son impact :
Réduction de l’énergie qui l’alimente et de ses composants.
Clément C-G. et Xuechun W.
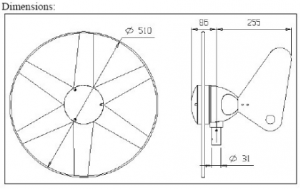
Analyse fonctionnelle de l’Eolienne “Rutland 503 Windcharger”
1) Présentation du système choisi
Vidéo de présentation: https://www.youtube.com/watch?v=9OqLZ9Ur8po
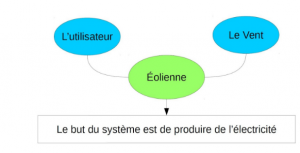
2 Analyse du besoin
2.1 Fonction globale
Cette éolienne est prévu pour capter l’énergie du vent et la transformer en énergie électrique pour l’utiliser dans le domaine domestique.
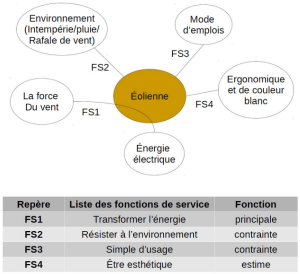
2.2 Fonctions de service et contrainte
. Être capable de s’adapter à la direction et à la force du vent.
. Être stable sur sa structure
. Capter le vent.
. Être facile à l’emploi
. Donner un montant suffisant d’électricité.
. Ne pas être trop bruyant
. Ne pas être trop lourd
. Pouvoir être installé facilement.
. Respecter les normes de sécurité
3 Analyse du système
4) Quelques fonctions techniques et solutions techniques
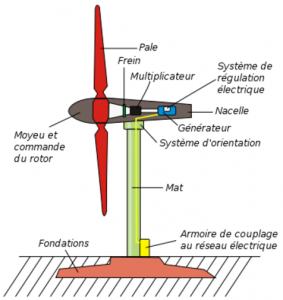
4.1 Générateur
– Fonction technique : Produire de l’électricité
– Solution technique :Un Générateur qui se met en mouvement par les hélices afin de produire de l’énergie électrique.
4.2 Des pales
– Fonction technique : Acquérir la force du vent pour alimenter le générateur
– Solutions techniques : Des pales/hélices plastiques très légers
4.3 La tête qui tourne
– Fonction technique : s’orienter en fonction de la direction du vent
– Solutions techniques : Une base du métal qui permet à la tête se tourner facilement
4.4 Stabilisateur
– Fonction technique : Stabiliser la tête d’éolienne
– Solution technique :Un stabilisateur en métal (gouvernail), fixé derrière l’éolienne
5) Analyse du générateur
L’énergie mécanique créé par les hélices est transformé en énergie électrique par le générateur.
lien internet source www.powerwind.co
le principe du fonctionnement du générateur
On place une hélice sur le rotor du générateur. l’action mécanique produite est transformé en énergie mécanique (voir schéma) .
l’énergie produite est ensuite stocké dans des batteries, afin d’être utilisée plus tard, et par d’autres appareils
Pour consulter l’article sur les éolienne et leur fonctionnement : www.éolienne-particulier.info
6) Impact environnemental
– L’éolienne ne demande pas de source d’énergie électrique
– L’éolienne demande moins d’espace que les panneaux solaires
– L’éolienne fait du bruit lorsque ses hélices tournent en raison des frottements des hélice avec le vent
– Ne fonctionne qu’en présence de vent
– Ne fonctionne pas en intérieur
– La construction est simple et respectueuse de l’environnement
– Les pièces extérieurs d’éolienne sont en plastique, issu du pétrole, une ressource en voie d’épuisement.
– Evolution possible pour réduire son impact :
. Réduction du bruit.
Travail réalisé par Large Rémi et Stepanishchev Oleksiy, élèves en 1S2
Le 13/09/2016
Drone AR Parrot
Analyse du Drone AR Parrot
1 Système choisi : AR Drone Parrot 1.0

Drone AR Parrot avec sa coque de protection

Drone AR Parrot avec sa coque simple
AR Drone Parrot (avec ses coques prévues pour l’extérieur/intérieur) (Source : LP2I)
Vidéo de présentation du drone : https://www.youtube.com/watch?v=RrWRVAqNgUQ
2 Analyse du besoin
2.1 Fonction globale
Ce drone est prévu pour voler en intérieur et en extérieur tout en enregistrant des images et en étant piloté via un smartphone avec une application gratuite, téléchargeable sur Android et iOS.
2.2 Fonctions de service et contrainte
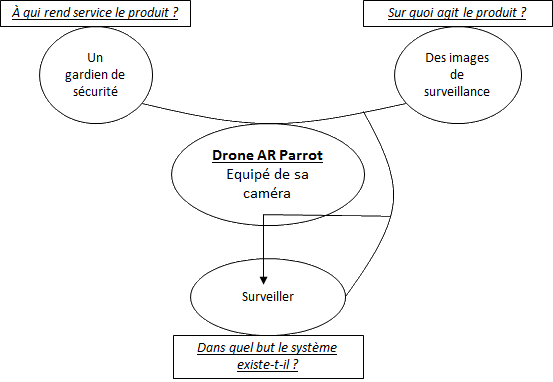
Diagramme bête a corne du drone AR Parrot.
Source : diagramme « bête à cornes »,LP2I
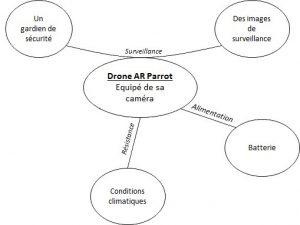
Diagramme pieuvre du drone AR Parrot.
Source : diagramme « pieuvre » LP2I
| Repère | Liste des fonctions de service et contraintes |
| Surveillance (FP) | Surveiller en direct via une caméra |
| Alimentation (FC1) | Etre alimenter par une batterie |
| Résistance (FC2) | Résister à l’environnement |
| Commande (FC3) | Etre télécommandable à longue distance |
3 Analyse du système
3.1 Fonctionnement, vu de l’utilisateur

Capture d’écran via AR.Freeflight sur Google Play Store

Capture d’écran via AR.Freeflight sur Google Play Store

Capture d’écran via AR.Freeflight sur Google Play Store
Source : Capture d’écran de l’application AR.Freeflight, Google Play Store
L’utilisateur télécharge l’application de pilotage AR.Freeflight du drone sur Internet s’il est déjà en possession d’un smartphone Android ou iOS. La connexion entre le drone et le smartphone s’effectue via une connexion Wi-Fi. Une fois la connexion effectuée, l’utilisateur voit en direct sur son smartphone ce que « voit » la caméra frontale du drone comme s’il était dans un cockpit. Le pilotage d’effectue grâce aux deux joysticks tactiles ci-dessus, l’un pour l’altitude l’autre pour la direction. Si la liaison Wi-Fi vient à se couper, le drone dispose d’un pilote automatique qui le posera en douceur. L’autonomie du drone est de 12 minutes environ pour un temps de charge de 1h30.
3.2 Matière d’œuvre et valeur ajoutée.
Le drone est équipé d’une caméra à grand angle (93°) de 640×480 pixels, qui lui permet de retransmettre en direct les images qu’elle « voit » sur le smartphone de l’utilisateur mais aussi d’enregistrer les images filmées ainsi que le lieu et la date de l’enregistrement.
4 Quelques fonctions techniques et solutions techniques
4.1 Interface de dialogue
– Fonction technique : Dialoguer avec l’utilisateur
– Solution technique : Retransmettre en direct les images que voit le drone sur le smartphone de l’utilisateur via une caméra et une connexion Wi-Fi.
4.2 Capteurs
– Fonction technique : Acquérir des informations sur l’altitude à laquelle se trouve le drone.
– Solutions techniques : Altimètre à ultrason (40 kHz)
4.3 Moteurs
– Fonction technique : Générer une action mécanique pour faire voler le drone.
– Solutions techniques : Quatre moteurs sans balai brushless (35 000 tr/min 15 W)
4.4 Alimentation
– Fonction technique : Alimenter en énergie électrique de manière autonome
– Solution technique : Batterie au Lithium-polymère (11,1 V, 1 000 mAh)
5 Analyse de l’altimètre à ultrason
Le drone peut calculer à quelle distance il se trouve du sol et retransmettre cette donnée en direct grâce à l’altimètre à ultrason. Il s’agit tout simplement d’un émetteur et d’un récepteur d’ondes ultrason, inaudibles à l’oreille humaine, situés sous le drone.

AR Drone Parrot avec sa coque de protection
Source : Wikipedia
Principe de fonctionnement du capteur
L’émetteur va emmètre des ondes ultrason qui vont mettre un certain temps à se réfléchir sur le sol et plus le drone est en altitude, plus les ondes vont mettre de temps à rebondir contre le sol et à revenir vers le récepteur. Le drone n’a plus qu’à calculer l’altitude du drone en fonction du temps qu’ont mis les ondes ultrasons à se réfléchir sur le sol. Ce calcul se faisant quasi-instantanément, du point de vu de l’utilisateur, c’est en direct.
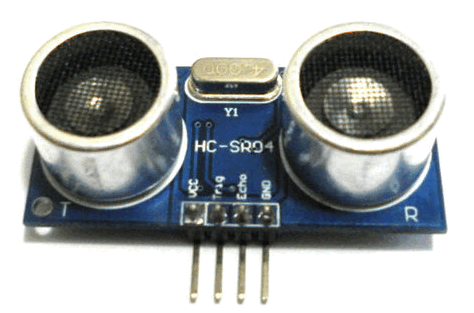
Photographie d’un émetteur/récepteur à ultrasons
Exemple d’émetteur/récepteur ultrasons, Source : ronan-chardonneau.fr
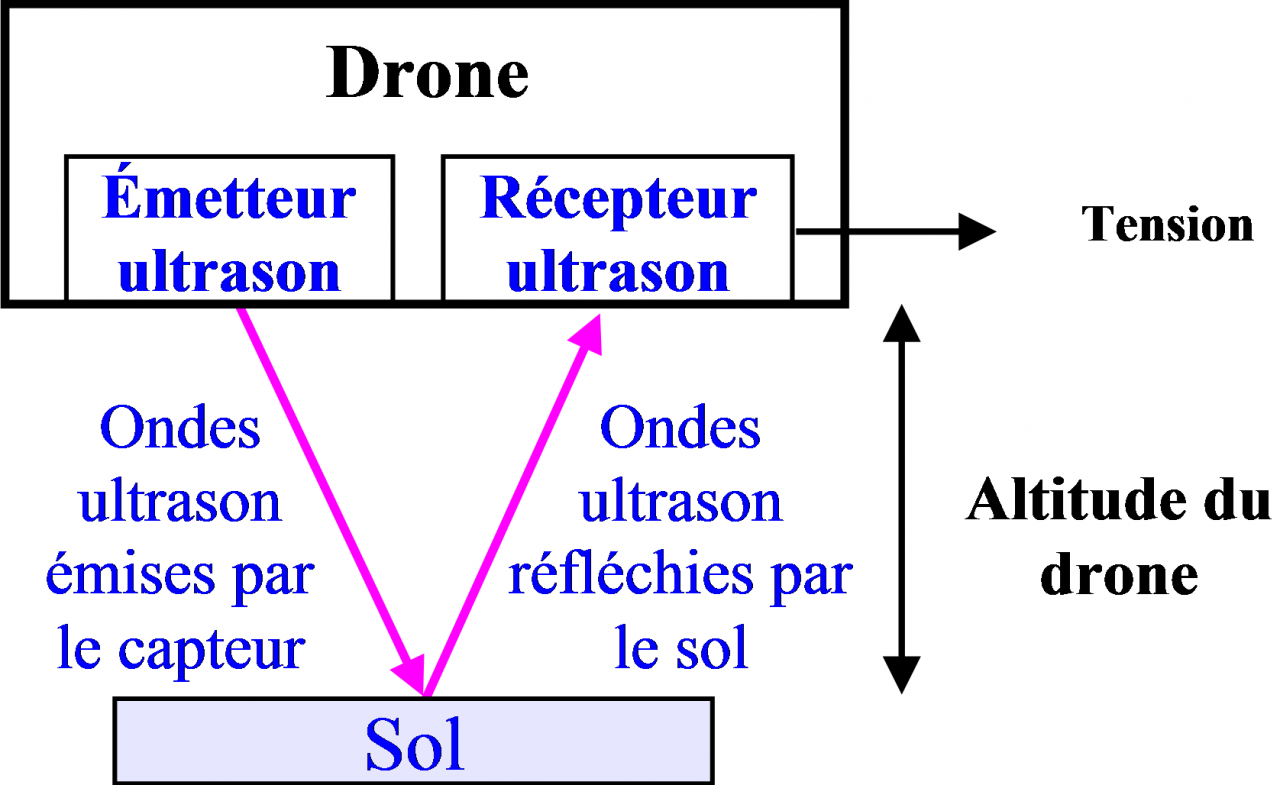
Schéma fonctionnel de l’émetteur/récepteur à ultrasons
Principe de fonctionnement d’un altimètre à ultrason (LP2I)
6 Impact environnemental
– Le drone consomme très peu d’énergie électrique car il fonctionne sur batterie
– Le drone est fabriqué principalement à partir de fibre de carbone et de polypropylène expansé qui sont des matériaux recyclables.
– Les pièces mécaniques du drone sont en plastique, issu du pétrole, une ressource en voie d’épuisement.
Félix.H et Quentin.D
Analyse fonctionnelle d’une centrale houlomotrice
Nous avons étudié un système qui s’appelle la centrale houlomotrice. La centrale houlomotrice produit de l’électricité grâce à l’énergie mécanique des vagues et le redistribue dans un réseau de distribution par des câbles situés sur le sol marin. Ce système est très utilisé dans les zones côtières à forte agitation (beaucoup de vagues) comme la Bretagne ou d’autres régions du monde comme l’Australie. Contrairement au centrale nucléaire, la centrale houlomotrice est écologique, autonome et ne nuis pas a son environnement. Malgré tout ça la centrale à quelques contraintes, elle doit pouvoir résister aux intempéries, a la corrosion et au fouling. Si la centrale rencontre un problème au niveau du dispositif sous marin, une commande de besoin de maintenance va être envoyée au dispositif depuis le centre de commandes et si le résultat de la commande est positif, le dispositif va émerger pour faciliter la réparation ou maintenance.
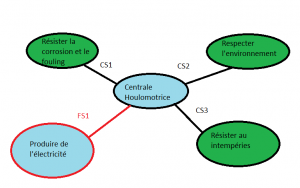
FS : Fonction de service
CS: Contraintes
Voici une vidéo explicative de la centrale : https://www.youtube.com/watch?v=Z11mbfiC66o
Auteurs : DUMAN Inan et THOREAUX Nathan
Compte-Rendu de la tondeuse autonome Automower 430x

Husquvarna Automower 430x
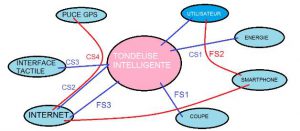
Fonctions de l’objet étudié
Fonctions de Service |
Tondre l’herbe (FS1)Être dirigeable par Smartphone (FS2)Pouvoir être repéré (FS3)Doit détecter les obstacles sur la route via un câble et des capteurs |
Contraintes |
Devoir se recharger sur la base (CS1)Être connectable à internet pour pouvoir être contrôlé via smartphone (CS2)Avoir des boutons pour être contrôlé directement (CS3)Posséder une Puce GPS pour être repérable (CS4) |
Nous avons fait une analyse fonctionnelle d’un aspirateur robot .
Une tondeuse autonome a les fonctions d’une tondeuse ordinaire (tondre l’herbe) mais d’une façon autonome (sans l’intervention de l’Homme). De plus, elle est moins bruyant qu’une tondeuse à moteur thermique.
Pour configurer la tondeuse autonome Husqvarna AUTOMOWER 430x, , cette dernière est équipé d’une interface avec des boutons et un écran LCD pour contrôler la tondeuse .

Représentation de l’interface de la tondeuse . Image provenant du manuel d’utilisation
Ces composants répondent à la fonction d’usage Comment contrôler la tondeuse ? , ce qui lui permettra de pouvoir être contrôlée sans smartphone , car elle peut aussi être contrôlée via un smartphone .
La prise pour recharger est située à l’avant , le robot se met dans une station de charge , qui lui sert également pour se repérer .
Pour avancer , le robot avance aléatoirement jusqu’à croiser un cable , qui lui indique la limite du terrain . il doit donc faire demi tour pour continuer , jusqu’à ce qu’il retourne sur la station de charge , soit car le délai pour tondre est terminée , soit car l’utilisateur a renvoyé le robot sur la base ( bouton PARK ou via son smartphone . )
Il est composé de lames , pour couper l’herbe, de capteurs divers pour voir si la tondeuse n’est pas levé (pour arrêter les lames) , pour voir si le câble est proche pour retourner a la base , etc …
Il possède également une puce GPS pour pouvoir être repéré via smartphone .
Et d’une puce internet pour pouvoir recevoir des instructions du smartphone .
L’appareil doit être également élégant pour attirer une clientèle , surtout vu le prix de plus de 3000€ .
L’herbe est coupée et non arraché, de manière homogène mais n’est pas récupérée par la tondeuse.
Concernant l’interface de la tondeuse , la solution technique est constituée de boutons poussoirs , ainsi qu’un écran LCD permettant l’acquisition d’information sur le choix de l’utilisateur (mode de fonctionnement) et d’informer l’utilisateur.
La fonction technique des capteurs est , eux , d’acquérir des informations sur l’environnement de la tondeuse (obstacle devant la tondeuse, soulèvement de la tondeuse) , les solutions étant des capteurs ultrasoniques .
Le déplacement est assuré par des moteurs , la fonction technique est de générer une action mécanique pour déplacer le robot , la solution est 2 moteurs électriques .
L’alimentation est elle assuré par une batterie au lithium-ion , dont la fonction technique est d’alimenter en énergie électrique la tondeuse de manière autonome .
Son impact environnemental est relativement élevé , car même si la tondeuse fonctionne sur batterie , elle contient bien plus de composants électroniques, chère à produire et polluants , comme la batterie dont la fabrication est très polluante , et la coque est faite de pétrole , une ressource en voie d’extinction .
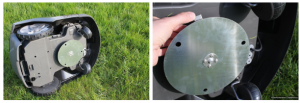 Système de coupe de la tondeuse Automower 430x
Système de coupe de la tondeuse Automower 430x
(source : Les Numériques )
Enfin , pour couper l’herbe , elle utilise des lames circulaires fonctionnant par inertie .
Sources additionnelles :
Application – AUTOMOWER CONNECT
https://www.youtube.com/watch?v=pADyVgU2EF4
Présentation et test – HUSQVARNA AUTOMOWER 330X
https://www.youtube.com/watch?v=RXfcSe0407A
https://www.youtube.com/watch?v=Dp_dW0ywveU
Présentation système de coupe
https://www.youtube.com/watch?v=qXknnKAbsDQ
Présentation système de recharge.
https://www.youtube.com/watch?v=px-ybuClf3A
Analyse fonctionelle : Centrale nucléaire à réacteur à eau présurisé
Présentation global
Une centrale nucléaire à réacteur à eau pressurisé est une centrale qui produit de l’énergie grâce à de la vapeur d’eau, chauffé par de l’uranium enrichie, qui actionne une turbine, qui transmet l’énergie mécanique à un générateur, qui produit de l’électricité.
Fonctionnement général

Légende et source à préciser
Schéma de principe d’une centrale nucléaire REP. ( Wikipédia )
Analyse du besoin
Fonction globale
La centrale nucléaire doit fournir de l’énergie sur un réseau électrique à partir d’uranium enrichi.
Fonctions de service et contrainte
. Être proche de la mer ou d’un cour d’eau
. Avoir une enceinte de sécurité de 10 km
. Produire un maximum d’énergie avec un minimum d’uranium enrichie
. Respecter les normes de sécurité
. Produire le moins de déchet possible
. Respecter des normes de taux de radioactivité dans l’eau rejeté.
Analyse du système
Fonctionnement, vu de l’utilisateur
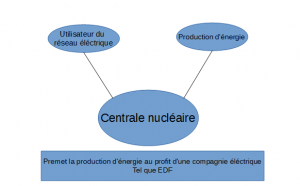
Pour l’utilisateur ( EDF par exemple ) la centrale nucléaire produit de l’électricité pour la distribuer sur le réseau électrique.
Matière d’œuvre et valeur ajoutée
La centrale nucléaire agit sur de l’eau, qu’elle transforme en vapeur grâce à de l’uranium enrichis.
Flux
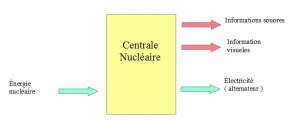
– Sur ce schéma fonctionnel on représente des flux d’informations (en rouge ici) et des flux d’énergie (en vert ici).
Quelques fonctions techniques et solutions techniques
Mur d’enceinte
L’enceinte protectrice du noyau d’une centrale nucléaire est faite d’acier et de béton armé. Cette enceinte est construit pour éviter les fuites radioactive en cas d’accident tel que la fusion du noyau. Les nouveaux Réacteurs pressurisés européen (EPR) possède une enceinte de confinement composée de deux parois de béton: une paroi interne en béton précontraint ( technique de construction qui permet le renforcement du béton), recouverte d’une peau métallique coté intérieur et une paroi externe en béton armé, chacune de ces parois a une épaisseur de 1,3 mètre.
Système de refroidissement
Lors de la sortie du deuxième circuit l’eau sous forme de vapeur traverse le circuits de refroidissement avant de retourné dans le deuxième. La vapeur passe par un condensateur qui transforme la vapeur en eau liquide. Se condensateur est composer d’un tuyaux qui ramène la vapeur d’eau et un autre tuyaux ,qui lui, vient pomper de l’eau froide dans une source (fleuves, rivière) et la fait passer dans le condensateur pour refroidir la vapeur. L’eau froide réchauffer par le condensateur est rejeté dans une cheminée avec un système aéroréfrigérants.
Vidéo EDF : https://www.youtube.com/watch?v=xp3KP1YPnqU
Analyse du capteur de chaleur
Il y a plusieurs types de sondes de chaleur aux niveaux du circuits primaire celle que l’on va étudier se situe aux niveaux entre le réacteur et le pressuriseur . C’est une sonde de type à temps rapide c’est à dire que le la prise et l’envoie de l’information se fait plus rapidement qu’une sonde standard ; Ce qui permet de mesurer avec beaucoup de précision les variation de température et régulé la pression en conséquence.
Impact environnemental
Une centrale nucléaire rejette de nombreux déchets classifiés en plusieurs catégories :
-
Les TFA, ou déchets très faiblement actifs, issus principalement de matériaux contaminés issus de démantèlement de centrale.
-
Les déchets de classe A, ce sont des déchets à vie courte, avec une faible ou moyenne activités. Ils leurs faut 300 ans pour perdre leur radioactivité. Ils représentent environ 90 % des déchets produit en France. Ils sont compacté dans des fûts et stocké en surface.
-
Les déchets de classe B et C, ce sont des déchets a vie longue avec une très haute radioactivité, il leurs faut plusieurs millier voir centaine de millier d’année pour la perdre. Ils sont enfoui sous une couche de bitume ou de verre. Ils représentent 10% du volume total de déchets.
De plus, les rejets liquides et gazeux autorisés contaminent les sols et les nappes phréatiques.
Cependant, une centrale nucléaire émet beaucoup moins de CO2 que d’autre moyen de production non renouvelable. En effet elle produit 6 gramme de CO2 par KWh pour 978 pour le charbon.
Onshape un logiciel professionnel de modélisation 3D innovant et gratuit pour un usage pédagogique

Sommaire
- Objectifs de cet article
- Pourquoi Onshape va probablement percer dans l’éducation
- Onshape est un logiciel encore jeune mais innovant
- Une application web qui utilise le cloud de manière innovante
- Pourquoi les utilisateurs de SolidWorks peuvent facilement passer à Onshape
- Onshape propose énormément d’aide … mais en anglais pour le moment
- Comment commencer à utiliser Onshape
7.1) Créer un compte compte Education sur Onshape
7.2) Premières modélisations avec Onshape : des pièces d’un jeu de construction à vocation pédagogique.
7.3) Modélisation avec Onshape d’une barre avec des trous de fixation par vis
7.4) Modélisation avec Onshape d’une barre utilisable pour simuler, imprimer et assembler (sans vis) un mécanisme articulé
1) Objectifs de cet article
Je commence à utiliser Onshape depuis juillet 2016 et je lui trouve de plus en plus d’atouts. Je pense qu’Onshape devrait me permettre de mener plus efficacement avec mes élèves des activités autour de la modélisation de mécanismes.
Je rédige cet article pour partager mon travail et permettre aux enseignants de découvrir Onshape, identifier ses principaux avantages et inconvénients, commencer à l’utiliser avec un tutoriel en français, tester des utilisations pédagogiques plus approfondies en lien avec une imprimante 3D et le logiciel de simulation SimScale notamment, …
Je complète (et corrige) progressivement cet article. J’en profite pour lancer un appel à tous ceux qui utilisent déjà Onshape ou qui veulent essayer Onshape pour que nous partagions notre expérience. N’hésitez pas à me transmettre vos remarques, vos suggestions, les difficultés rencontrées avec vos élèves, …
Vous pouvez laisser un commentaire (à la fin de cet article) ou me contacter en privé à l’adresse suivante :
daniel.pers@ac-poitiers.fr
2) Pourquoi Onshape va probablement percer dans l’éducation
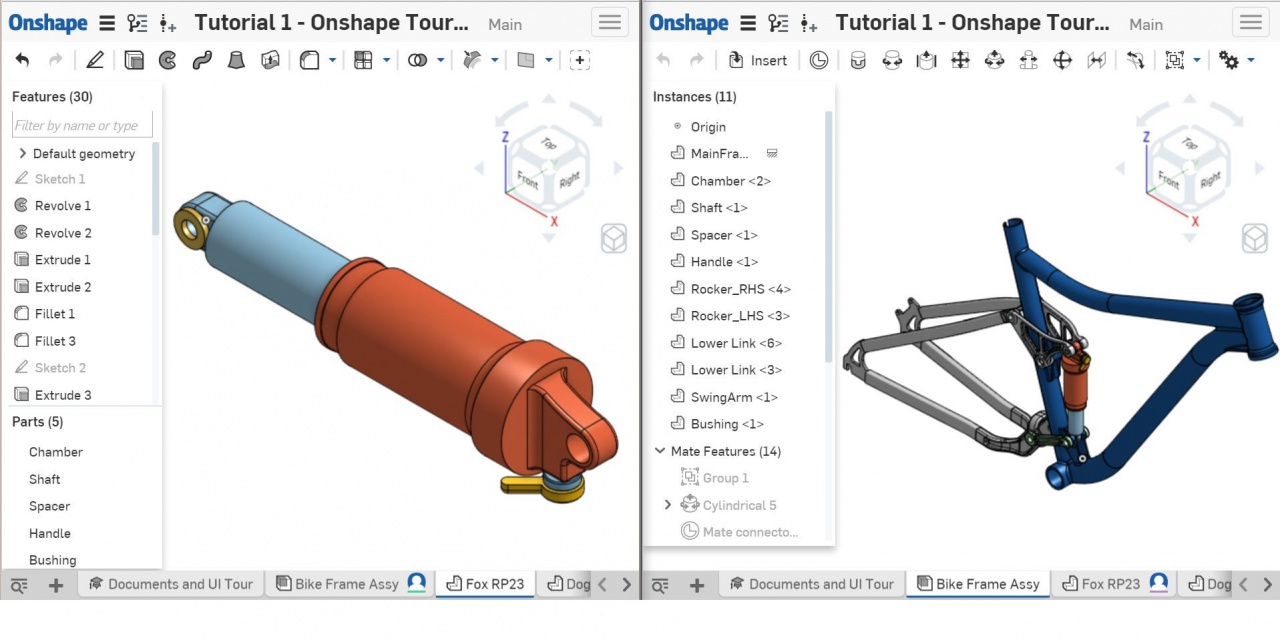
Espace de travail d’Onshape, en version PC ici, affichée sur 2 fenêtres. Amortisseur de vélo issu d’un tutoriel d’Onshape (Source : LP2I)
Onshape est un nouveau logiciel professionnel de modélisation 3D qui intéresse rapidement de plus en plus de monde.
Onshape est commercialisé depuis décembre 2015 seulement. Il a pour ambition de concurrencer directement les leaders du marché de la CAO 3D professionnelle tels que SolidWorks, AutoCAD, AutoDesk Inventor, AutoDesk Fusion 360, … Son mode de commercialisation est original : 100 $ par mois pour une utilisation professionnelle. Cela intéresse beaucoup d’entreprises pour qui l’achat de licences représente un coût difficile à supporter économiquement, surtout quand il faut racheter une nouvelle licence pour bénéficier des dernières améliorations du logiciel (y compris la correction de bugs).
Il y a beaucoup de monde sur le marché de la CAO 3D. SolidWorks occupe 22 % de ce marché en 2015. Onshape veut sa part du gâteau ! (Source : quora.com)

Le nombre de requêtes envoyées par les utilisateurs au service support d’Onshape progresse rapidement depuis décembre 2015, date à laquelle a débuté sa commercialisation. Cela montre qu’Onshape est de plus en plus utilisé. (Source : close2circle.com/es-onshape-el-futuro-del-cad-confirmacion-no1).
Onshape est une startup exceptionnelle déjà valorisée à plus de 800 millions de dollars (d’après le Boston Business Journal). Les spécialistes lui prédisent un grand succès commercial.
Mais Onshape intéresse aussi beaucoup tous ceux qui n’en font pas un usage professionnel comme les établissements scolaires, les FabLabs, … car Onshape est gratuit pour un usage pédagogique, sans aucune limitation ! Pour la modélisation 3D de mécanismes, les établissements scolaires utilisent aujourd’hui majoritairement SolidWorks. Ils ont de moins en moins les moyens de renouveler leur licence. Les budgets sont de plus en plus contraints, que ce soit les budgets venant de la Région, du Département, de la taxe d’apprentissage, … Pour notre lycée, le renouvellement de notre licence SolidWorks nous a coûté environ 2000 € pour une licence valable 3 ans seulement. Cela représente un lourd investissement, comparé par exemple aux 1000 € environ investis dans notre imprimante 3D (utilisable au moins 3 ans).

Les contraintes budgétaires pousseront de plus en plus d’établissements scolaires à choisir des logiciels gratuits (Source : Fotalia)
Bien entendu, Onshape espère que ces licences gratuites pour un usage non professionnel, lui permettra de gagner des parts de marché dans les années avenir. Onshape va même plus loin : il investit dans l’usage pédagogique de son logiciel en embauchant une équipe dédié. Cela lui coûte moins cher que faire de la publicité, cela permet d’augmenter très rapidement la communauté des utilisateurs, …
Le modèle économique d’Onshape attire aussi de nombreux partenaires qui proposent des applications compatibles avec Onshape. Je regrette pour le moment que la plupart de ces partenaires ne proposent pas encore de licence pour l’éducation.
Pour la simulation avec Onshape, SimScale semble être la solution la plus intéressante : simulation mécanique (résistance des matériaux), simulation mécanique des fuides (aérodynamisme …), simulation thermique, le tout avec une licence gratuite pour l’éducation (SimScale est un logiciel open-source).
![]()
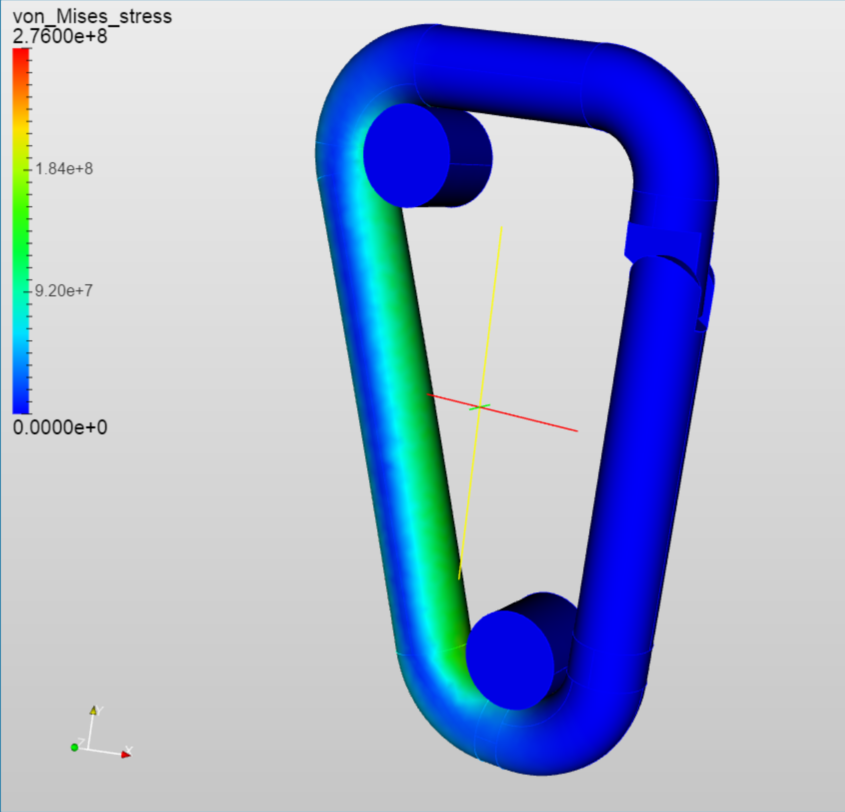
Simulation des contraintes mécaniques dans un mousqueton grâce au logiciel SimScale à partir d’une modélisation 3D (Source : simscale.com/projects/AnnaFless/dynamic_analysis_of_a_carabiner)
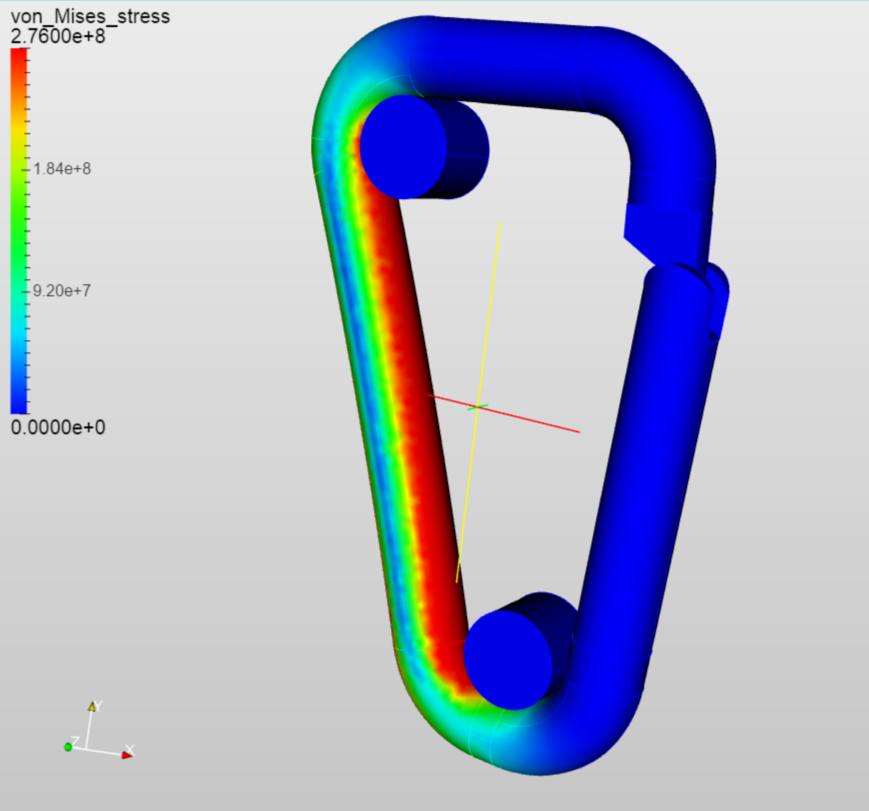
On peut voir l’importance de bien fermer le mousqueton pour optimiser sa résistance (Source : SimScale).
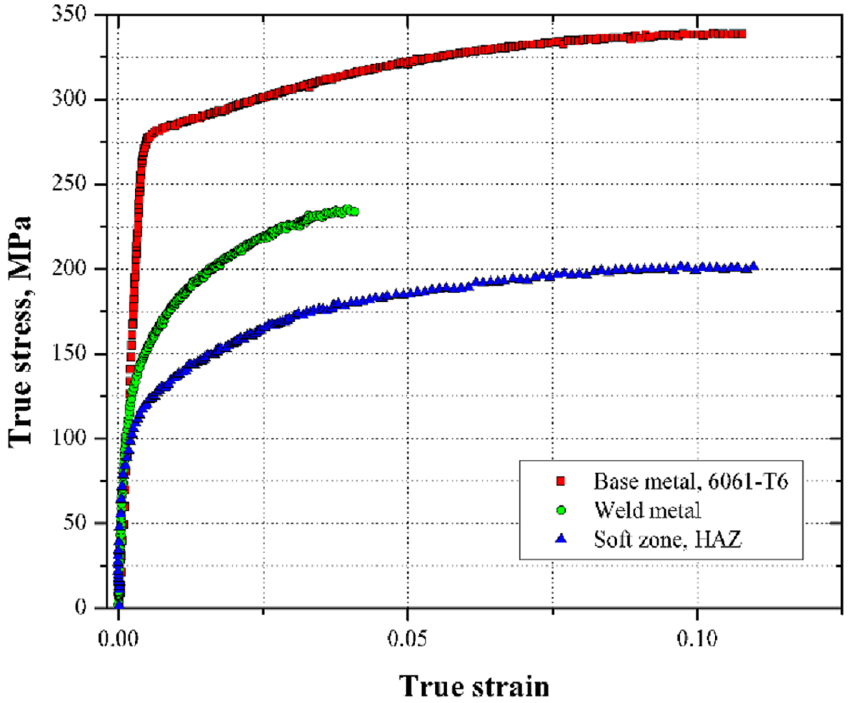
Analyse avec SimScale de la déformation de la pièce en fonction du matériau choisi (Source : www.simscale.com/projects/AnnaFless/dynamic_analysis_of_a_carabiner/ )
Projet ACF FabLab
Le LP2I a inauguré le 5 juillet 2016 les nouvelles salles entièrement dédiées à son projet Futur Classroom Lab qui permettront de multiples expérimentations pour faire évoluer nos pratiques pédagogiques vers les compétences du 21 ième siècle.
Ces salles sont déjà en partie équipées de moyens innovants. Un des objectifs pour cette année scolaire 2016-2017 est de mettre en place un FabLab dans ces nouveaux locaux. Ce FabLab permettra aux élèves de concevoir et fabriquer des objets avec des moyens de prototypage rapide, notamment une imprimante 3D. La création de ce FabLab sera menée avec l’aide d’élèves motivés par ce projet. Nous espérons que dès la rentrée de septembre 2016, un groupe d’au moins une dizaine d’élèves prendra en main ce projet dans le cadre des ACF (Activités Complémentaires de Formation). Les objectifs envisagés aujourd’hui pour ce projet ACF FabLab sont décrits ci-dessous.
– Définir la démarche de création du FabLab du LP2I
L’objectif est de proposer une démarche utilisable dans la plupart des établissements scolaires, en tenant compte des partenariats spécifiques qui peuvent être développés dans les établissements.
– Définir les moyens nécessaires
Les moyens choisis devront prendre en compte les contraintes fortes que connaissent les collèges et les lycées, notamment sur le plan financier. Il faudra choisir des solutions optimums que nous pourrons conseiller à tous les établissements (collèges et lycées) qui souhaitent se lancer avec un budget très limité. Nous écarterons les solutions ultra low-cost qui peuvent donner des résultats décevants ou être trop complexes à l’usage. Par exemple pour l’achat d’une nouvelle imprimante 3D, nous choisirons le meilleur matériel à moins de 1000 € permettant une utilisation simple et satisfaisante.
Je propose par exemple l’imprimante 3D Hephestos 2 de BQ, vendue en kit pour 850 €, qui peut être assemblée en moins de 5 h par une personne sans compétences particulières.
Imprimante 3D Hephestos 2, livrée en kit pour 850 € (source : les imprimantes3d.fr)
Dans le souci d’innover, du matériel plus innovant devra être envisagé comme ce scanner 3D low-cost (250 €).
– Créer des tutoriels pour faire vivre un FabLab :
. comment assembler l’imprimante 3D achetée en kit,
. comment mettre en oeuvre cette imprimante 3D dans le cadre d’activités pédagogiques,
. comment concevoir des objets constitués de pièces imprimées, conçues avec des logiciels gratuits comme BlocksCAD, ou OnShape,
. comment concevoir des objets motorisés, interactifs, communicants, pilotés par une carte électronique programmable de type Arduino, avec des logiciels libres et gratuits, notamment Blockly Arduino et App Inventor 2.
A chaque fois on prendra en compte les besoins des utilisateurs souhaitant se limiter à une utilisation basique du FabLab (voire une simple activité de découverte en 1 h ou 2 h pour un groupe d’ado.), et ceux souhaitant en faire une utilisation plus avancée avec une progression sur l’année.
– Développer l’aspect international et culturel de ce FabLab :
. développer des échanges et des coopérations avec des établissements étrangers (2 lycées de Côte d’Ivoire sont déjà intéressés par de tels échanges), grâce à Internet mais aussi en développant l’usage de la visioconférence,
. se questionner sur les aspects interculturels, économiques, développement durable, …

Programmation de cartes Arduino dans un FabLab en Côte d’Ivoire (dans les lycées techniques d’Abidjan et de Bouaké) créé par Eric Assi, enseignant (source : facebook.com/FamaLAB.ci/)
Les personnes intéressées par ce projet de création d’un FabLab au LP2I ne doivent pas hésiter à laisser un commentaire.
Daniel Pers, enseignant en Sciences de l’Ingénieur au LP2I
Robotique et programmation au LP2I
J’ai participé à une réunion sur le développement d’une formation pour les enseignants sur le thème de la robotique et de la programmation, sur la plateforme M@gistère de l’Académie de Poitiers.
Cela a été l’occasion pour moi de commencer à faire le point sur mes choix actuels et mes propositions pour l’avenir en ce qui concerne l’enseignement de la robotique et de la programmation. Je précise tout de suite que je suis convaincu que de nombreux choix peuvent être communs pour le niveau collège et le niveau lycée.
Cet article est en cours de rédaction !
1) Présentation de ma situation actuelle
– J’enseigne les Sciences de l’Ingénieur au Lycée Pilote Innovant International de Jaunay-Clan (près de Poitiers).
Je gère depuis 2012 le blog de la SI au LP2I.
– J’ai effectué depuis 3 ans un complément de service en Technologie au collège Jean Macé de Châtellerault. Je n’enseignerai pas au collège l’année prochaine.
Je gère depuis 2013 le blog de la techno au collège Jean Macé.
2) Matériel utilisé pour les activités en robotique et programmation
– Carte électronique programmable
Je travaille avec Arduino depuis 3 ans, aussi bien au lycée qu’au collège.
Je conseille d’utiliser des cartes Arduino qui sont compatibles avec le design de référence actuel, à savoir l’Arduino Leonardo. Il s’agit des cartes Arduino Micro (mon choix), Arduino Roméo (dont le circuit L298 est obsolète), Arduino Yun (dont l’alimentation ne possède pas de régulateur 5V mais qui est très intéressante quand même).
L’arduino Micro utilise le même schéma électrique et les mêmes composants que l’Arduino Léonardo (mais pas la même connectique).
Je conseille d’utiliser cette Arduino Micro avec la carte d’entrée/sortie DFR0012 de DFRobot :
http://www.gotronic.fr/art-shield-e-s-dfr0012-pour-nano-19256.htm
http://www.dfrobot.com/wiki/index.php/Arduino_Nano_IO_Shield_(SKU:_DFR0012)
http://www.dfrobot.com/index.php?route=product/product&keyword=DFR0012&category_id=0&description=1&model=1&product_id=68
L’ensemble DFR0012 + Arduino Micro remplace avantageusement une Arduino Leonardo avec une autre carte d’entrée/sortie, essentiellement pour des questions de connectique et de modularité, mais aussi de prix.
Il existe aussi une solution low cost pour remplacer la DFR0012 :
http://www.banggood.com/5Pcs-Multi-Function-Funduino-Nano-Shield-Nano-Sensor-Expansion-Board-p-970410.html (attention lot de 5)
La connectique est un peu plus courte : 4 broches de moins (inutiles), mais compatible Arduino Micro.
– Imprimante 3D
J’utilise une Tobeca 2 depuis 2 ans et j’envisage l’achat d’une imprimante 3D de marque BQ (une Hephestos 2 à 850 €, en kit).
Mise à jour du 11/09/2016 : J’ai rédigé ici un article sur notre projet de création d’un FabLab au LP2I.
– Autre matériel utilisé
Article présentant une partie du matériel que j’utilise au lycée et au collège.
3) Logiciels utilisés pour les activités en robotique et programmation
– Programmation Arduino
Après deux années d’utilisation d’Ardublock, je suis passé sur Blockly Arduino développé par Sébastien Canet, enseignant en Technologie, et formateur, dans l’académie de Nantes.
Article présentant l’intérêt pour moi du logiciel Blockly Arduino.
– Modélisation 3D
Je cherche depuis 2 ans une alternative à SolidWorks. J’ai choisi cette année ces deux logiciels :
. BlocksCAD
Il s’agit d’un logiciel conçu pour faire de la modélisation en 3D avec des enfants, avec le principe du logiciel Scratch.
C’est une application web libre et gratuite, traduite en français, basée sur blockly et OpenSCAD.
J’ai déjà écrit un premier article sur BlocksCAD.
. Onshape
C’est un nouveau logiciel professionnel de CAO 3D, sorti en décembre dernier qui a pour objectif de concurrencer directement SolidWorks avec une approche originale et innovante. Il est compatible en import et en export avec de nombreux logiciels dont SolidWorks. C’est une application Web dont l’usage est gratuit pour un usage pédagogique, sans aucune limitation. Des applications multi-plateforme existent pour tablettes et smartphones (y compris pour éditer des modèles 3D). Onshape me semble complémentaire de BlocksCAD pour un FabLab équipé d’une imprimante 3D, que ce soit au lycée ou au collège.
Je suis en train de découvrir Onshape. Je souhaite écrire prochainement un premier article sur Onshape pour faire connaitre ce logiciel qui marquera probablement un tournant dans la CAO 3D, notamment dans l’enseignement et dans les FabLabs où les moyens manquent pour acheter des licences ou des ordinateurs performants.
Lien vers l’application web Onshape.
Lien vers l’application Onshape pour Androïd.
Mise à jour du 11/09/2016 : j’ai rédigé ici un nouvel article sur Onshape.
4) Propositions pour le choix des moyens à utiliser pour enseigner la robotique et la programmation au collège et au lycée
– Privilégier le matériel et les logiciels open source.
– Privilégier le matériel et les logiciels compatibles Arduino qui est devenu un standard de fait.
– Privilégier la carte Arduino Leonardo et ses dérivés (l’Arduino Micro notamment) qui correspond au design de référence actuellement. L’Arduino Uno est obsolescente (et n’utilise pas un câble USB micro standard).
– Privilégier les logiciels de programmation graphiques, avec une syntaxe proche de Scratch, devenu un standard de fait. La programmation en langage C est hors programme, aussi bien au collège qu’au lycée pour la filière S.
– Privilégier les logiciels de programmation permettant aux enseignants (directement ou avec l’aide d’autres enseignants) de créer leurs propres blocs sans utiliser des outils logiciels complexes, et sans avoir à passer par une entreprise marchande. ce n’est malheureusement pas le cas d’Ardublock.
– Privilégier une utilisation de l’imprimante 3D comme moyen de prototypage rapide permettant de valider des solutions techniques de manière authentique, avec de la fabrication de pièces ayant un véritable rôle dans la chaîne d’information ou la chaîne d’énergie du système (par exemple des pièces permettant de transmettre un mouvement).
– Privilégier des supports low cost utilisables dans les établissements disposant de peu de moyens.
– Privilégier les supports motivants pour les élèves.
5) Proposition de parcours de formation en robotique et programmation au collège et au lycée
5.1) Approche fonctionnelle
Chaîne d’information et chaîne d’énergie.
Solutions techniques associées à chaque fonction.
Exemple de support possible : robot aspirateur
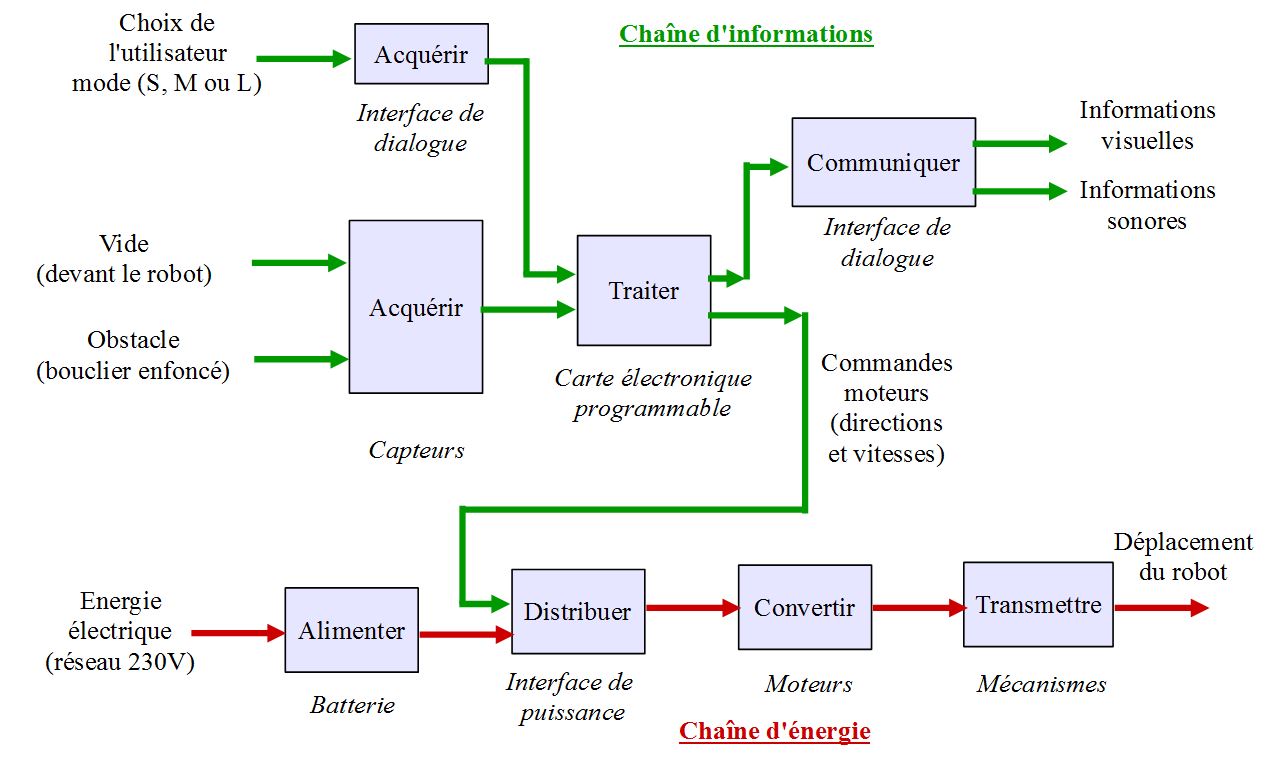
Schéma fonctionnel partiel d’un robot aspirateur : il représente des flux d’informations (en vert ici) et des flux d’énergie (en rouge ici). Source : LP2I
Document présentant quelques rappels sur la chaîne d’information et la chaîne d’énergie d’un robot aspirateur :
Chaine d’énergie et chaine d’information 120616
5.2) Solutions techniques pour acquérir des informations et générer des commandes pour la chaîne d’énergie
– Cas d’un capteur de type Tout Ou Rien
Exemple = capteur de collision.
– Cas d’un capteur analogique
Exemple = capteur de vide qui permet d’acquérir la distance entre le robot et le sol.
– Démarche expérimentale
Moyens matériels nécessaires = carte Arduino + câble USB + capteur de type tout ou rien (un simple contact suffit, sinon on peut simuler avec le clavier du PC).
Moyens logiciels = application web Blockly Arduino.
Interface de dialogue = écran du PC
– Ressources documentaires
A compléter
5.3) Solutions techniques pour alimenter la chaîne d’énergie et piloter des actionneurs
– Cas d’un servomoteur
C’est une solution simple qui intègre un moteur à courant continu, un réducteur (qui permet de réduire la vitesse de rotation et d’augmenter le couple), une interface de puissance, un capteur de position qui permet de commander un servomoteur directement en position. La rotation est généralement limitée à environ 180°.
Il existe aussi des servomoteurs commandés en vitesse appelés servomoteurs à rotation continue.
Un servomoteur peut être directement commandé par une carte Arduino. Sa tension nominale d’alimentation est généralement de 5V ce qui en simplifie la mise en oeuvre avec une carte Arduino.
. Approche expérimentale
Matériel nécessaire : une carte Arduino + un câble USB + un petit servomoteur low-cost type SG90 par exemple.
– Cas d’un moteur à courant continu avec une interface de puissance permettant de contrôler le sens de rotation et la vitesse de rotation.
. Approche expérimentale
Matériel nécessaire : une carte Arduino + un câble USB + une interface de puissance moteur standard + un petit motoréducteur basse tension (fonctionnant sous 5V pour éviter une deuxième alimentation en plus de l’USB).
5.4) Concevoir des pièces mécaniques pour transmettre un mouvement issu d’un actionneur
– Utilisation de BlocksCAD et de OnShape
Mise à jour du 11/09/2016 : j’ai rédigé ici un nouvel article sur Onshape.
5.5) Fabriquer rapidement le prototype d’un mécanisme pour valider une solution
– Utilisation d’une imprimante 3D
Article en cours de rédaction !
World Trade Center ( New-York )
=> Quelles sont les solutions innovantes retenues par le constructeur pour obtenir les performances souhaitées ?
=> Ces solutions correspondent-elle à un bon compromis pour le développement durable ?
1/ Présentation
La World Trade Center est un immeuble situé dans la ville de New York, conçu par l’architecte Minoru Yamasaki et a été inauguré le mercredi 4 avril 1973.
Il a était construit après la seconde guerre mondial pendant une période ou les États-Unis
connaissaient une grande période économique (1958 – 1973). Marquées par un incendie le 13 février 1975 puis par un attentat à la bombe le 26 février 1993, les tours jumelles ont été intégralement détruites par deux avions détournés le 11 septembre 2001.
2/ Structures porteuses
A – Analyse
La structure porteuse était conçu en acier et de béton. Elle est présenté verticalement comme si la largeur du bâtiment est tangente à la sphère de la Terre, puis perpendiculairement au plancher. Il y a également un réseau interne qui constitue le noyau central.
Des poutres étaient aussi mises en place transversalement pour stabiliser et rigidifier l’ensemble.
Les poutres qui soutiennent les planchers étaient des poutres treillis reliées d’un côté à une façade, et de l’autre, au centre de la tour.
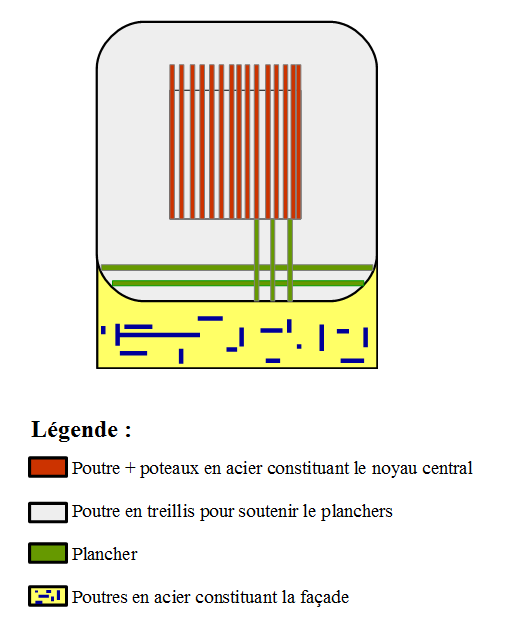
Source : LP2i. De manière simple, vous pouvez visiter une autre image en cliquant sur ce lien ( Source : twintowerstpedot.wordpress.com )
B – Expérimentation
Avec notre expérimentation, nous avons déduis la force exercée par un objet pesant 500 g, sur une poutre en bois.

Source : LP2i
Par estimation, en mesurant la flèche, on obtient 90 mm pour une poutre d’un mètre de long. Dans un cas général, nous déduisons numériquement la charge unitaire :
Données :
$ b = 15 \: mm $ : “base de la poutre” ( en m )
$ h = L = 1 \: m $ : “hauteur ou longueur de la poutre” ( en m )
$ I_G = \frac{b \cdot h \cdot ( b^2 + h^2 )}{12} \iff I_G = 12.5 \: dm^{4} $ : “moment quadratique de la poutre” ( en m4 )
$ E = 10 \: GPa $ : “pression” ( en Pa )
$ f = 90 \: mm $ : “flèche” ( en m )
$ p = ? $ : “charge unitaire” ( en N·m-1 )
\[
f = \frac{5 \: p \: L^{4}}{384 \: E \: I_G } \iff \: p = \frac{384 \: E \: I_G \: f}{ 5 \: L^{4} } \iff p = 86 \: 419 \: 440 \: N \cdot m^{-1}
\].
La charge unitaire est donc de 86 MN/m.
C’est pour cela que le concepteur a choisi de mettre plusieurs planchers ( Voir 2 partie A en une image ) pour que la charge unitaire et la flèche soit approximativement nulle.
3/ Destruction des deux tours
A – Lors de l’attentat du 11 septembre 2001
Le premier impact est celui de la Tour du Nord à 8h46, tandis que le deuxième impact est celui de la Tour du Sud à partir de 9h02. Il a fallu 102 minutes pour qu’il y ait un flambage de la Tour du Nord, et 56 minutes pour la Tour du Sud. Ce flambage provient de la flexion d’un poteau en acier, qui est passé de l’état solide à l’état liquide.
Pendant leurs impacts, à l’intérieur des deux tours, les températures ont atteint 1000°C ( maximum ) et les différents aciers ont pu atteindre les 700-800°C. Pour prendre un exemple avec l’eau, elle peut passer de l’état solide à l’état liquide lorsque la température est supérieure à 0°C ( jusqu’à 100°C ). D’une manière générale, on dit qu’elle est flexible comme une règle Maped mais verticalement.
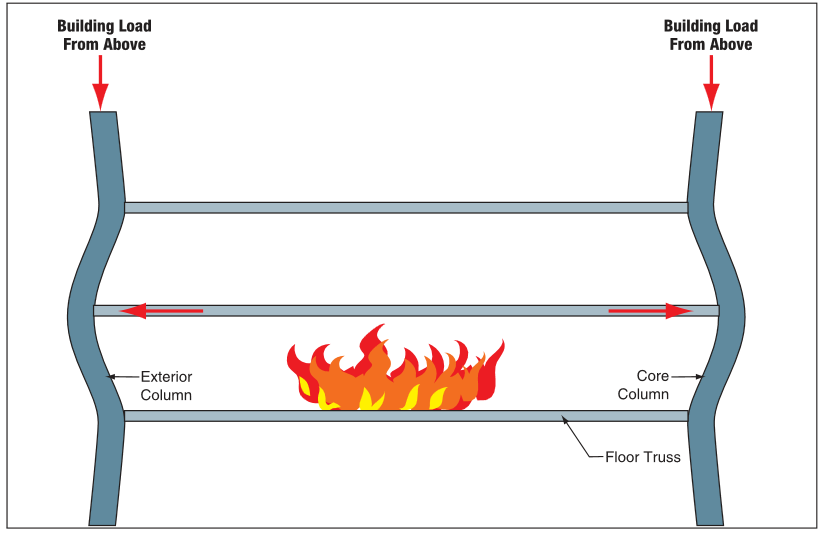
La colonne ( en acier ) déformée avec l’incendie ( à l’intérieur de la World Trade Center ); Source : FEMA, Chapitre 2, 2002
En une autre image, on peut constater qu’une fois que l’avion est rentrée en s’autodétruisant, il faut que les poutres non-coupées tiennent n fois plus que les poutres coupées ( Exemple sur la Tour du Nord coupée par le premier avion ) :

Pendant les attentats du 11 septembre. Source : Slate.fr
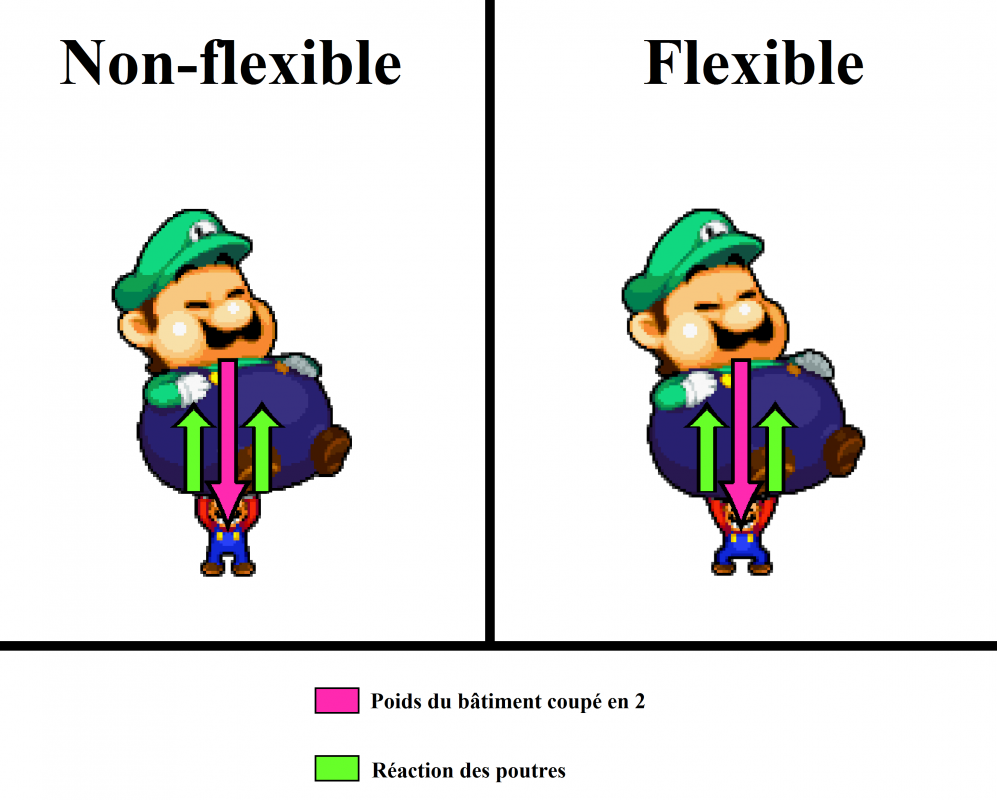
B – Exemple avec Mario portant Luigi
( en cours… )
Source ( pour les images prises ) : spriters-resource.com
Pour cela, il faut que Mario se tienne debout pour une longue durée comme pour la Tour Eiffel.
On note :
$ \overrightarrow{P} $ : le poids de Luigi ( légendé schématiquement en rose )
$\overrightarrow{R_{muscle}}$ : la force tenue par Mario ( légendé schématiquement en vert )
$\overrightarrow{R_{left}}$ : Bras gauche de Mario
$\overrightarrow{R_{right}}$ : Bras droit de Mario
$ \overrightarrow{R} = \overrightarrow{R_{left}} + \overrightarrow{R_{right}} $
Si on veut que les poutres soient équilibrés, en 2 équations, on a :
$ \overrightarrow{R_{left}} = \overrightarrow{R_{right}} = \frac{1}{2} \overrightarrow{P} $
Si : $ \sum \overrightarrow{F_{i}} \neq \overrightarrow{0} $ , alors Mario risquera de se faire aplatir. Notamment, le bâtiment risquera de se flamber.
Si : $ \sum \overrightarrow{F_{i}} = \overrightarrow{0} $ , alors Mario tiendra toujours debout. Le bâtiment reste solide et fixe.
C – Calculs de la vitesse d’effondrement lors du flambage des deux tours
Lors du flambage, en déterminant physiquement la vitesse d’effondrement, nous appliquons les 3 formules particulières afin d’en déduire les résultats trouvés.
Données :
$ d_1 = 526.6 \: m $ : Hauteur de la Tour du Nord ( avec l’antenne )
$ d_2 = 415.3 \: m $ : Hauteur de la Tour du Sud
$\overrightarrow{g} = 9.81 \: m \cdot s^{-2} $ : Accélération de la pesanteur
$ m = 485 \: kt $ : Masse des deux tours jumelles
Déterminons le temps nécessaire pour que les deux tours s’effondre en allant de leur hauteur jusqu’au sol :
\[
t_{WTC North} = \sqrt{ \frac{2 d_1}{ \overrightarrow{g} } } \iff \: t_{WTC North} = 10.36 s
\].
\[
t_{WTC South} = \sqrt{ \frac{2 d_2}{ \overrightarrow{g} } } \iff \: t_{WTC South} = 9.2 s
\].
Calculons la vitesse d’effondrement :
\[
v_{WTC North} = \overrightarrow{g} \times t_{WTC North} \\ \iff \: v_{WTC North} = 101 m \cdot s^{-1} \: \iff \: v_{WTC North} = 365 \: km \cdot h^{-1}
\].
\[
v_{WTC South} = \overrightarrow{g} \times t_{WTC South} \\ \iff \: v_{WTC South} = 90 m \cdot s^{-1} \: \iff \: v_{WTC South} = 324 \: km \cdot h^{-1}
\].
Une fois que la vitesse d’effondrement est déduite, nous calculons l’énergie cinétique :
\[
W_{WTC North} = 2^{-1} m \cdot {v_{WTC North}}^2 \\ \iff \: W_{WTC North} = 2.505 \: TJ
\].
\[
W_{WTC South} = 2^{-1} m \cdot {v_{WTC South}}^2 \\ \iff \: W_{WTC South} = 1.975 \: TJ
\].
En sachant qu’avec l’énergie dégagée par la destruction des deux tours, c’est presque équivalent à une masse allant de 472 à 598 tonnes de TNT.
Par estimation, certains habitants ont déterminé réellement ( sans précision ) le temps d’effondrement jusqu’au sol, approximativement 11.5 s ( pour la Tour du Sud ) & 12.6 s ( pour la Tour du Nord ). C’est la réaction du reste de la tour qui a permis de tenir le fragment du bâtiment ( qui est coupé en 2 ). C’est pour cela qu’on a pris un exemple avec Mario portant Luigi.
4/ Conçu pour le développement durable après les attentats du 11 septembre ?
| Avantages | Inconvénients |
| – Recyclage de l’acier
– La structure porteuse a résisté pendant 100 minutes avant que l’acier soit fondu |
– Coût des dégâts très élevé pour l’état, la ville & la société
– Structure porteuse non-convenable – Beaucoup de matériaux nocifs ( ex : Amiante ) – Beaucoup de personnes gravement malade ( poussières toxiques + incendie ) – Coefficient de sécurité trop important ( s > 2.5 ) |
5/ Conclusion
– La WTC s’est effondrée et a causé des dégâts très importants accompagnés de matériaux nocifs ainsi qu’un nuage de poussière toxique. La conception du bâtiment n’a pas pu respectée la contrainte sur la sécurité ( c’est-à-dire la solidité du bâtiment ). Mais si on protège l’acier avec du béton, elle aura un avantage sur la sécurité mais un inconvénient pour l’environnement ( impact sur l’environnement ).
– La structure porteuse doit être présenté autrement car il y a des risques de flambages ( voir 2 partie A ).
Centre nautique de Bayonne
Problématique: Pour le bâtiment ou la construction choisi par votre équipe :
– Quelles sont les solutions innovantes retenues par le constructeur pour obtenir les performances souhaitées ?
– Ces solutions vous paraissent-elles correspondre à un bon compromis en terme de développement durable ?
Notre équipe étudie le Centre nautique de Bayonne, construit en 2010 et dont la caractéristique est d’être Haute Qualité Environnementale (HQE) (source:http://architopik.lemoniteur.fr/index.php/realisation-architecture/centre_aquatique_des_hauts_de_bayonne/4629)
(source:http://architopik.lemoniteur.fr/index.php/realisation-architecture/centre_aquatique_des_hauts_de_bayonne/4629)
- Introduction
Dans le cadre du plan de rénovation et de redynamisation urbaine lancé par la Ville de Bayonne, un nouveau centre aquatique a été implanté dans le quartier des Hauts de-Bayonne, prenant en compte les critères et exigences du développement durable et de l’éco-conception.
La municipalité́ a souhaité que cette construction soit labellisée Haute Qualité́ Environnementale (HQE). Ainsi, afin de respecter les contraintes du développement durable, le site propose:
- une “parfaite” intégration du bâtiment dans le paysage ;

une “parfaite” intégration du bâtiment dans le paysage
(http://architopik.lemoniteur.fr/medias/programme/projet/format/resize/4601/format4/projet_4629/h300coupe_540_360.jpg)
- une utilisation de matériaux sains et recyclables ;
- une toiture végétale favorisant la gestion des eaux pluviales et participe à l’intégration du bâtiment dans le paysage ;

une toiture végétale favorisant la gestion des eaux pluviales
- une exploitation maximale des éclairages naturels ;

une exploitation maximale des éclairages naturels
- un bassins en inox permettant de limiter le traitement physico-chimique de l’eau car sa surface lisse empêche la fixation d’algues ou de champignons et facilite l’entretient, de monter plus rapidement en température et d’assurer une plus grande durée de vie des structures (de 20 à 40 ans). C’est de plus un matériau recyclable, léger et souple (résiste aux déformations dues aux mouvements de terrains ou aux légers choc par exemple). Mais cela reste tout de même un produit “de luxe”.
- La structure porteuse
- Elle est constituée d’une charpente en bois lamellé collé, de poteaux ronds en bois et d’éléments verticaux en béton armé.
- —-> Pourquoi le lamellé collé?
- Comme son nom l’indique, ce matériaux est composé de lamelles de bois collées, permettant ainsi de faire de grandes pièces de bois que l’on ne pourrait pas obtenir avec un arbre, de faire des formes complexes et comme il est très homogène, il possède de bonnes propriétés techniques. Cependant, c’est un matériaux qui reste cher. Cliquer ici pour plus d’information.
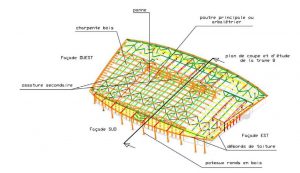
Schéma Structure porteuse Source: document Bac STI2D 2012
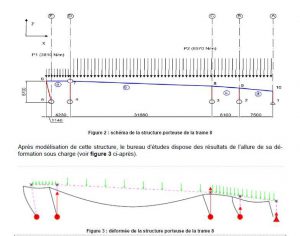
déformation maximale de l’arbalétrier
La flèche, ici notée Umax, située à 15,85 m du nœud 4, est égale à:
Umax = 1.62*10-2* ((P2*L)/(E*I))
où E: module de Young du matériau constitutif de la poutre, en MPa
Bois Lamellé collé : E = 10 000 MPa
I : inertie de la section de la poutre, en m4 et I = (b*h3)/12 où b et h sont la largeur et la hauteur de la poutre
P2: charge appliquée dans la poutre, en N/m
L: portée de la poutre, en m
Umax: flèche maximale de la poutre, en m
- Critère de flèche :
Les règlements de la construction imposent une valeur limite à cette flèche :
- cas du bois lamellé collé : Umax ≤ L/250
On calcul le moment quadratique du lamellé collé:
Donc ici Umax =1.62*10-2* ((8570*10-6*31.664)/(10000*I))
= 1.62*10-2* ((8570*10-6*31.664)/(10000* ((b*h3)/12))
On calcul pour la poutre L*C 230*2000
donc Umax = 1.62*10-2* ((8570*10-6*31.664)/(10000* ((0.230*23)/12)) = 4 408 333m
- La démarche de cette construction labellisée HQE
La démarche HQE vise à améliorer la qualité environnementale des bâtiments neufs et existants , c’est à dire à offrir des ouvrages sains et confortables dont les impacts sur l’environnement , évalué sur l’ensemble du cycle de vie ,sont les plus maitrisés possibles .C’est une démarche d’optimisation multcritère qui s’appuie sur une donnée fondamental :un bâtiment doit avant tout répondre à un usage et assurer un cadre de vie adéquat à ses utilisateurs .
Pour obtenir cette labellisation HQE, la construction doit être la réalisation de :
- le respect d’une démarche d’éco-construction ;
- l’optimisation de la gestion et de la maintenance technique des installations ;
- le confort visuel.
Cibles éco-construction
« L’espace de 1 480m2 ouvre sur le jardin et offre une vue sur la ligne des Pyrénées Sur le solarium extérieur, les baigneurs sont à l’abri des regards depuis la chaussée.».
Pour des bâtiments avec leur environnements , Il y a une parfaite intégration paysagère dans cette nouvelle construction. Ce centre aquatique est adossé aux courbes du terrain en une forme de coque . L’originalité réside dans le choix des matériaux, dont le grand bassin réalisé en inox, et le confort acoustique assuré par un mélange de panneaux en bois au plafond et de cellules végétalisées, tels des jardins suspendus, dans la paroi entre le bassin et les vestiaires.
Le versant environnement du centre aquatique est aussi dans ce qui ne se voit pas : la récupération des eaux pluviales, la production de 50 % de l’eau chaude sani- taire grâce à 70 m2 de panneaux solaires thermiques, une pompe à chaleur réversible de 275 kilowatts, et l’utilisation de la chaleur de l’eau de débordement pour le chauffage.

cellule végétalisée dans les parois
cellule végétalisée dans les parois
Matériaux renovelables
Il y a trois matériaux recyclables utilisés dans la construction de la piscine, permettant de mettre en avant les 2 cibles d’éco-construction visées dans cet ouvrage .
| Matériaux : | inox | Bois (epicea, sapin des Vosges) | Cellule végétalisée |
| Localisation | Bassin | charpente | Paroi intérieure |
la gestion de l’entretien et de la maintenance
Cette piscine est dotée d’un réseau informatique et d’un accès à internet permettant une gestion à distance de tout le système technique.
Cet environnement informatique permet de :
- détecter et résoudre rapidement des problèmes de manière à répondre rapidement aux besoins de santé et de confort des usagers ;
- • limiter au maximum les déplacements des techniciens et ainsi participer à la diminution d’émission de CO2.
- Réseaux informatiques
On utilise la technologie ADSL (Asymmetric Digital Subscriber Line) sur le réseau local pour relier WAN ( width Area Network). En plus le routeur modem ADSL a la fonction de passerelle, donc l’organisation physique du réseau offre bien la possibilité d’une gestion à distance depuis internet. LAN (Local Area Network) peuvent communiquer entre elles et avec le routeur parce que toutes les adresses sont de la forme 192.168.1.x/24. de plus si les machines disposent l’adresse de passerelle 192.168.1.1 alors elles peuvent communiquer avec internet et ainsi avec la gestion à distance.
le serveur GTB local récupère les différentes informations que les automates lui envoient toutes les minutes et le serveur local envoie les ordonées au serveur distant .

Structure du réseau informatique
- Réseau hydraulique
Dans ce bâtiment, il y a un bassin de nage que couvre une surface de 510 m², c’est un nage thermostaté avec la température entre 28 et 30°C. Normalement, après que quelqu’un nage, il y a des cheveux ou des déchet inutiles flottants dans l’eau. C’est le signe d’un défaut du système de traite des eaux. L’eau du bassin de nage est filtrée par un traitement chimique.
Pendant tout le circulation, y a 4 fonctionnement: filtrage, lavage, rinçage, vidange.
Filtrage:
L’eau du bassin de nage suit le cheminement suivant:
-recueillir par les goulottes positionnées sur la périphérie du bassin représente 70% du débit d’eau filtré
-collecter par des grilles de fond constitue le complément (30% du débit)
-première fois filtre dans un pré-filtre
-ajouter le floculant pour coaguler les impuretés
-deuxième fois filtre par 2 filtres à sable fonctionnant simulatnément
-chauffer
-réinjecter dans le bassin de nage
Dans le traitement de l’eau du bassin de nage, il y a deux pompes montées en parallèle pour réalisé la circulation. Chaque pompe assurent 50% du débit.
Lavage:
Le lavage des filtres à sable est obtenu par circulation inversée d’eau à travers le filre. Le lavage des filtres à sable a deux pompes pour accroître la vitesse de circulation de l’eau dans le filtre.
Quand la pression en amont des filtre dépasse la valeur fixée, la alarme technique est générée, c’est le signe que le filtre est encrassé et pour protéger le lavage des filtres.
Rinçage:
Avant de l’eau repasser, il vais évacue le résidus dans la bâche tampon des contre-lavanges.
Vidange:
Il vais en utilisant les pompes de recyclage à diriger l’eau vidangée vers la bâche tampon des contre-lavanges.
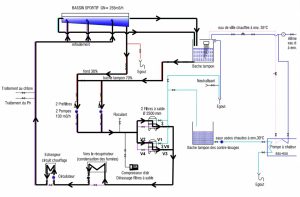
Phase de filtrage des eaux du bassin
Groupe 7: Solène Dumas-Grollier , Sijia Li, Minting Shen, Yixuan He
Pont Jacques Chaban Delmas
Nous sommes un groupe de quatre élèves et allons vous présenter le pont que nous avons étudié durant quelques heures. Nous essaierons de répondre aux questions suivante :
Quelles sont les solutions innovantes retenues par le constructeur pour obtenir les performances souhaitées ? Ces solutions vous paraissent-elles correspondre à un bon compromis en terme de développement durable ?
Sommaire :
I. Présentation
Situation géographique :
Le pont Jacques-Chaban-Delmas, se situe à Bordeaux, c’est un pont levant franchissant la Garonne entre le pont de pierre et le pont d’Aquitaine, il se situe dans le prolongement de la rue Lucien-Faure et relie le quai de Bacalan au quai de Brazza, au nord de La Bastide, d’où son nom initial de pont Bacalan-Bastide.
Période de construction :
Les travaux se sont déroulés d’octobre 2009 à fin décembre 2012. L’ouvrage a été mis en service et ouvert à la circulation le lundi 18 mars 2013, deux jours après son inauguration.
Description du pont :
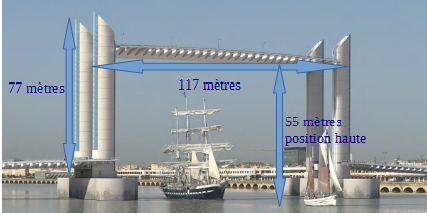
Le pont présente une longueur totale de 575 mètres avec 433 mètres de pont principal et 117 mètres de travée levante permettant de préserver les trafics maritime, fluvial et événementiel.
Les pylônes du pont, protégés d’éventuels chocs par des îlots de béton en amont et en aval6, présentent une hauteur de 77 mètres. Ils permettront un tirant d’air similaire à celui du pont d’Aquitaine en position haute, soit 55 mètres au-dessus du lit de la Garonne, et à celui du pont de Pierre en position basse, soit 13 mètres7. La distance entre les pylônes est de 110 mètres.
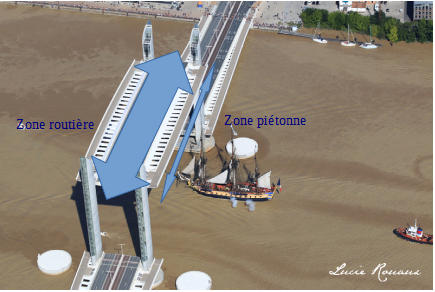
La largeur du pont varie de 32 à 45 mètres suivant les différentes sections. La largeur utile est de27 mètres avec 15 mètres utilisés par le transport en commun en site propre, les piétons et les deux-roues et 12 mètres pour les véhicules légers et les poids lourds. Les pistes cyclables et piétonnes sont séparées de la circulation des véhicules à moteurs. Ainsi cette circulation douce s’effectue à l’extérieur des pylônes du pont.



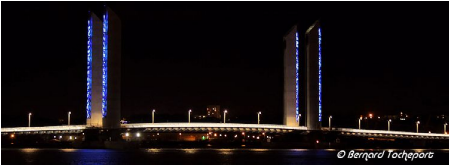
Les lumières
Les lumières ne sont pas là pour éclairer mais pour souligner les lignes de l’ouvrage. La lumière des pylônes est due à la présence de milliers de lampes DEL. Les pylônes changent de couleur en fonction de la marée. Lorsque la marée est haute, on voit du bleu outremer et quand elle est basse, du vert Véronèse. Les DEL scintillent pendant les fêtes. Yann Kersalé, le responsable de cet éclairage, de celui de l’opéra de Lyon et du cours Victor-Hugo a été interpellé par l’UNESCO pour s’occuper de l’éclairage du pont Jacques-Chaban-Delmas.
II. Structure porteuse du pont
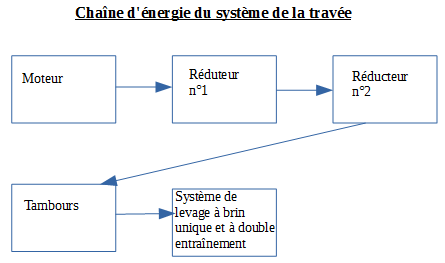
III. Chaîne d’énergie parties mobiles
Écoquartier d’Issy-les-Moulineaux
Le quartier se situe au Sud de Paris en Haut-de-Seine.

Nous allons dans cette article étudier différentes facettes de cet éco-quartier par des systèmes et des chaînes, en effet nous allons voir le système de collecte pneumatique des déchets de l’éco-quartier mais aussi le chauffage en voyant sous plusieurs aspects, premièrement en tant que chaine d’énergie non-mécanique et deuxièmement en tant que chaine d’acquisition avec un capteur analogique. Nous ajouterons à cela une expérimentation au niveau thermique.On étudiera également le système MyHome qui centralise les domaines à l’intérieur des appartements ( éclairages, stores, chauffage etc …) puis nous verrons aussi la structure porteuse des appartements.
Le LP2I
Le LP2I
Le LP2I fut construit en 1987, par un architecte du nom de François-Xavier Désert et l’agence Architecture-studio.

Construction du lycée. https://fr.wikipedia.org
Sa structure porteuse :
On observe que le sol est en fait une dalle soutenue par des poutres elles même soutenues par des poteaux. Ceux ci sont alignés de haut en bas du rez de chaussé au 4ème étage.

Dalle soutenue par la poutre. LP2I
Les différentes poutres sont reliées aux poteaux par des pièces métalliques elles servent à répartir la masse des poutres et de la charge qu’elles portent au centre du poteau. En voici une :

Pièce métallique reliant les poutres. LP2I
Le lycée est constitué de nombreuses poutres et structures porteuses, on remarque que dans la cour intérieure les fenêtres sont petites car elles doivent laisser suffisamment d’espace pour des poteaux passant entre elles.

Cour intérieure du lycée. http://www.projetcelestin.fr
Le béton est renforcé par des barres d’acier comme dans les poutres par exemple. Cet alliage se nomme du béton armé.

Exemple de ferraillage d’un poteau (béton armé). http://www.larousse.fr
Pour les grands espaces, comme la cafétéria au lieu d’utiliser des poteaux comme pour le reste du bâtiment il y a trois grandes structure triangulaire qui portent tout l’espace autour du vide du 1er au 4ème étage. On peut observer qu’ils sont creux. Cette structure, de part sont originalité se démarque et représente une certaine forme d’innovation. De plus sa forme compacte lui permet d’éviter les échanges de chaleur économisant de l’énergie.

Vue extérieure du lycée. http://www.lp2i-poitiers.fr/
Chaîne d’énergie de l’éclairage

Chaîne d’énergie de l’éclairage. LP2I
Le réseau WiFi du lycée
Le lycée dispose de son propre réseau WiFi. Sa gestion est centralisé et de nombreuses bornes sont disséminés dans l’enceinte du lycée. On ne peut en rajouter actuellement, en effet le lycée est saturé en bornes. Si l’on décidait d’en rajouter cela créerait des interférences.
Borne WiFi. LP2I
La coupole (toît amovible)
Vidéo de la coupole en action :
https://www.youtube.com/watch?v=-WXczSHV00k
Sa chaîne d’énergie :
La coupole du lycée est une partie du lycée représentative permettant de montrer aux gens le côté innovant du lycée.

Chaîne d’énergie de la coupole. LP2I
Son alimentation électrique est 380V. Elle peut réaliser la commande automatique ( la coupole bouge ) avec le capteur anémomètre. Il va être actif lorsque la vitesse du vent est supérieure à 60km/h, grâce au système poulie courroie.
Sources de l’article :
Le Stade Pierre Mauroy de Lille

Le stade Pierre Mauroy – www.info-stades.fr
Le stade Pierre Mauroy est situé à Villeneuve-d’Ascq, commune de la métropole européenne de Lille. Il a été inauguré en août 2012. Il était, pour la société Eiffage, un vrai enjeu technologique. Ce sont les architectes Valode & Pistre et Pierre Ferret qui se sont occupé du développement de ce stade.
Ce stade combine à la fois stade, avec une pelouse, et à la fois une Aréna et un palais des sports. Le stade est notamment prévu pour accueillir des matchs de l’Euro 2016. La pelouse mobile permettant au stade de se transformer en Aréna de cette manière est unique au monde. De plus, le stade possède également un toit amovible. La combinaison de ces deux éléments technologiques au sein d’un même stade est une première.
La durée des travaux a été de 2 ans et demi. Le coût est de 282 millions d’euros pour ce qui concerne le stade et ses parkings. L’investissement global était 324 millions d’euros.
Le stade a été tout d’abord créé afin que le LOSC, le club de football de Lille, possède un stade homologué afin de pouvoir participer à la Champions League. De plus, la création de ce stade a favorisé la sélection de la France comme pays organisateur de l’Euro 2016.
Vous pouvez découvrir le stade et son environnement grâce à la vidéo ci-dessous.
https://www.youtube.com/watch?v=f9aU_mzc0dE%20
En quoi les solutions innovantes retenues par le constructeur pour obtenir les performances souhaitées correspondent-elle à un bon compromis en termes de développement durable ?
La principale innovation technologique, le toit
Le toit du stade est une innovation technologique complexe car il est mobile. Le toit repose principalement sur deux méga-poutres qui traversent le stade en long. Ces méga-poutres mesurent 205 mètres de long et 16 mètres de haut.

Mégapoutre du stade – www.info-stades.fr
Ces méga poutres en acier sont équipés de câbles de précontrainte qui vont créer des efforts internes afin de réduire la hauteur de ces poutres et d’en limiter la flèche quand le toit est fermé. Chacune des deux poutres pèsent 1800 tonnes. Les poutres supportent donc la toiture du stade, la charpente métallique et les quatre plateaux mobiles du toit ce qui fait un total de 7400 tonnes.
Pour hisser le tout à 31 mètres de haut, il a fallu attendre le bon moment car le vent ne devait pas dépasser 10m/s. Il s’agissait d’un travail de précision.

Section du stade Pierre Mauroy – www.detail-online.com
Le grand stade est muni d’une toiture gigantesque qui se situe de 31 m de haut et possède 4 éléments principaux : 2 structures hautes et 2 structures basses.
Comme nous pouvons voir dans cette section du stade, les quatre éléments se positionnent selon une configuration « gigogne » lorsque le toit est fermé. Ces deux structures hautes ont un poids chacune de 340 t, et deux autres structures basses se pèsent de 280 t chacune et chacun se mesure de 80 m sur 35. La toiture est composée de ce qu’on appelle « demi-toiture » ou « système de toit rétractable » qui est utilisé aujourd’hui non seulement au stade de Pierre Mauroy, mais aussi à l’University of Phoenix stadium. Il y a une autre couverture rajoutée de 30 cm pesant 600 t, qui a une fonction d’étanchéité, d’isolation thermique et de l’insonorisation, à la fois d’anti-réverbération à l’intérieure.
Il faut environ un quart d’heure pour que cette immense toiture puisse s’ouvrir, une structure de semi-portique assure l’ouverture et la fermeture du toit.
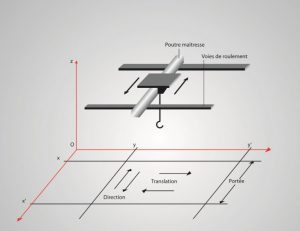
La structure de semi-portique appartient à ce qu’on appelle pont roulant, ce système possède au moins une poutre horizontale se déplaçant le long de chemins de roulement, les chemins de roulement peuvent être situés en hauteur ou au niveau du sol.
LP2I
Dans notre étude de cas, les demi-toitures sont posées sur les mégapoutres qui prennent en charge de soutenir une masse totale de 7400 tonnes et les rails jouent un rôle de guidage pour ces demi-toitures.
Nous pouvons simplifier cette toiture rétractable en un système de pont roulant de grande taille, qui est constitué d’un quadrilatère qui est muni de sommiers équipés de galets assurant le déplaçant sur l’une et l’autre des voies de roulement. Des dispositifs anti-déraillement ou anti-envol peuvent être ajoutés. Ces derniers peuvent prévenir un déraillement, notamment du toit en cas de séisme.

Schéma d’un pont roulant équipé de galets
En comparant avec Minute Maid Park, un stade de base-ball américain qui possède aussi un toit mobile, on peut donc calculer la résistance au roulement entre les galets et le rail du roulement afin de prouver la raison pour laquelle le stade de Pierre-Mauroy a choisi ce système du pont roulant en utilisant les galets :
Masse totale du toit (Le cas de Minute Maid Park) :3810 tonnes
Nombre de galets : 140
g(Accélération gravitationnelle) : 10Nm·s-2.
CRR (Coefficient de résistance au roulement) :0,003
Cf(Coefficient de frottement)=0,25
Fp(Poids)
FR(Résistance de roulement)
On estime que le poids repart sur tous les galets par parts égales et que le matériel n’est pas déformé, nous avons alors :
Fp=m.g=3810.103. 10=38,1 MN
FR = Fp. CRR =38100000.0,003=114,3 KN
FR(chaque roue)=FR/140=816N
Nous comparons avec la force de frottement sur le rail :
Ff=Fp.Cf=38100000.0,25=9,52MN
D’après le calcul théorique, nous voyons que l’emploi d’un système de pont roulant avec les galets et le rail réduit efficacement le frottement entre le guidage et le rail. Cela est donc une solution pertinente pour le stade de Pierre-Mauroy d’ouvrir / de fermer le toit.
EXPÉRIMENTATION
Pourquoi des méga poutres en treillis et pas de simples poutres en I ou de simples poutres planes ? Nous pourrons tester sur des poutres imprimés grâce à l’imprimante 3D l’influence des forces appliqués sur celles-ci. En essayant d’adapter les forces à appliquer en fonction des vraies forces exercées sur les poutres dans le stade, à notre échelle.
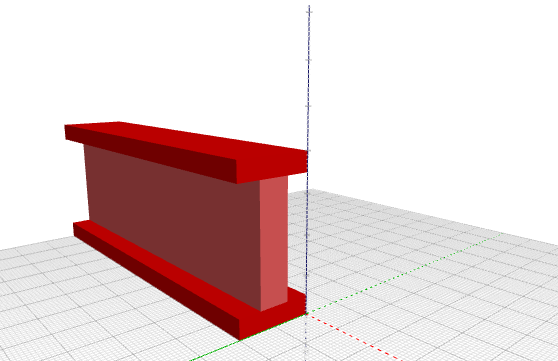
Poutre en I
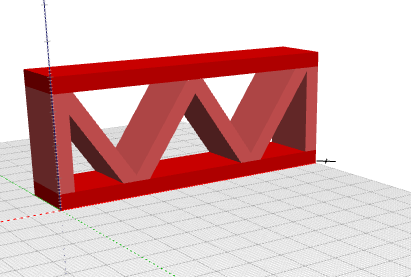
Poutre en treillis
Cette observation nous permettrait de voir pourquoi dans le stade, la structure de la méga poutre est en treillis, et quelles seraient les principales déformations de ces différentes poutres. Nous aimerions également quantifier les différentes flèches, expérimentalement, et voir aussi les répartitions des forces au sein des structures.
Expérimentation 1 :
Nous avons un peu modifié notre expérimentation de départ :
– Nous allons uniquement étudier les poutres avec un profil en I (IPN)
Sur celle-ci, nous allons voir l’influence du blocage de la poutre (encastrement ou non) pour un effort donné en un point, au centre de la poutre.
Nous allons procéder comme ceci :
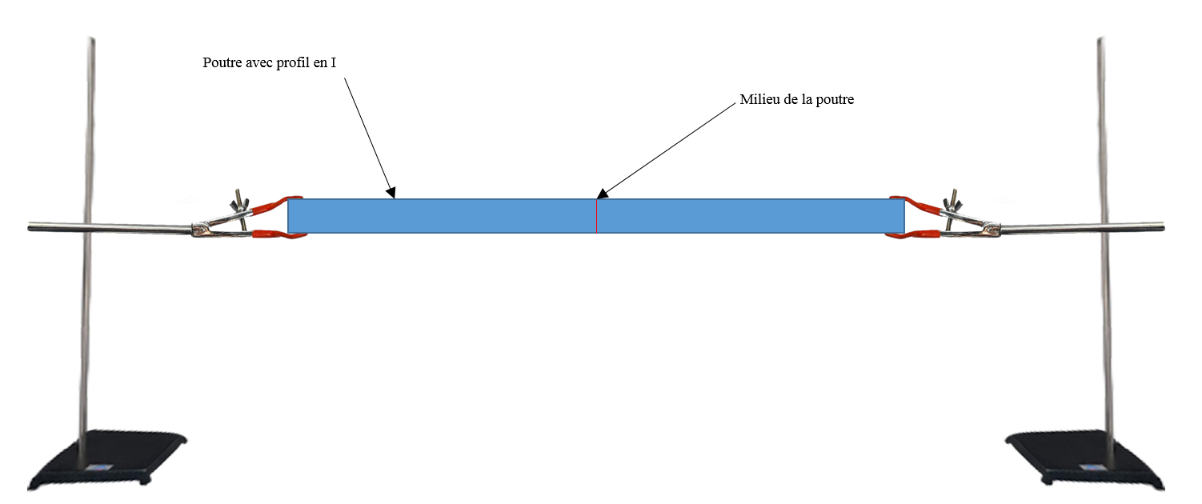
Nous allons fixer la poutre entre deux supports, ce qui va la bloquer.
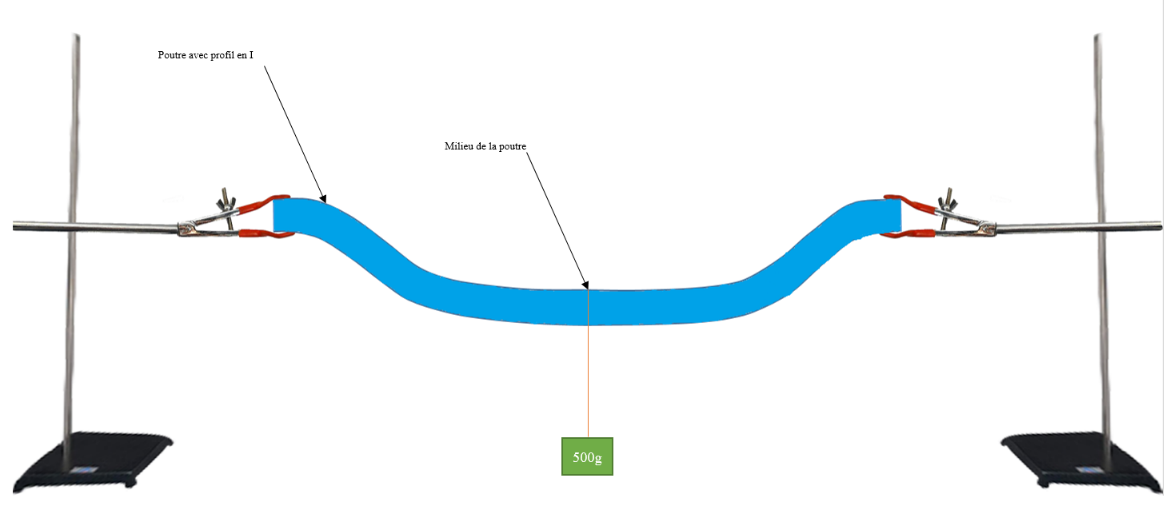
Ensuite nous allons accrocher au centre de la poutre une masse de 900g afin d’avoir une déformation due à cet effort. Au début, nous voulions accrocher une masse de 500g à la poutre, mais la déformation étant trop faible, nous avons augmenté la masse.
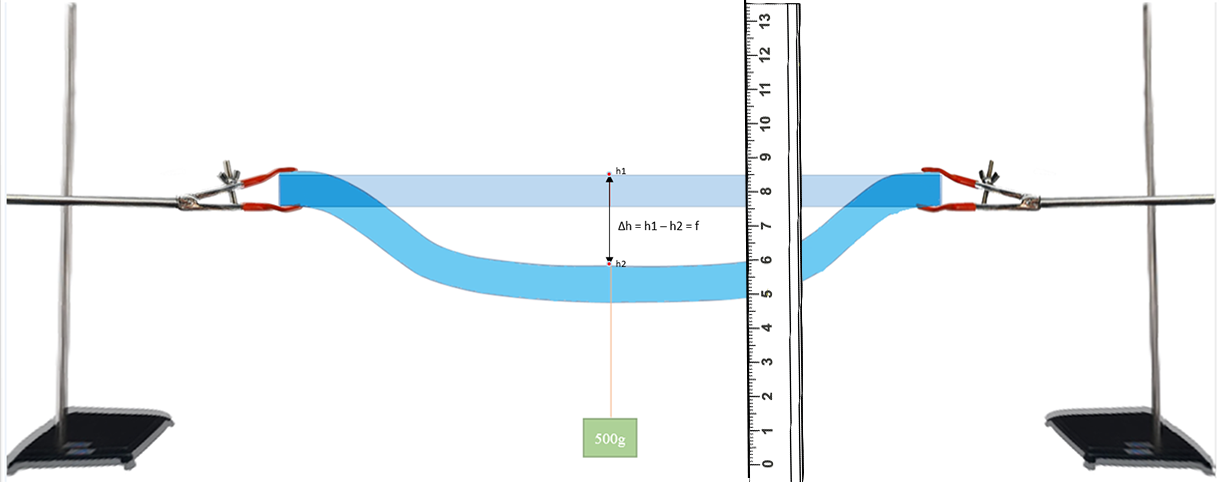
Nous voulons mesurer la différence de hauteur, à un certain point de la poutre, avant et après l’ajout de la masse afin d’obtenir la flèche. Nous allons répéter cette expérience en bloquant sur une plus ou moins grande distance les extrémités de la poutre.
Exemple :
Calcul théorique :
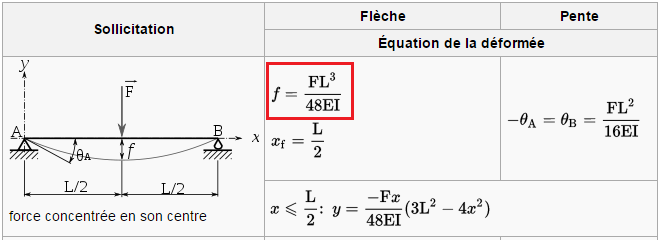
Source: Martial Santorell
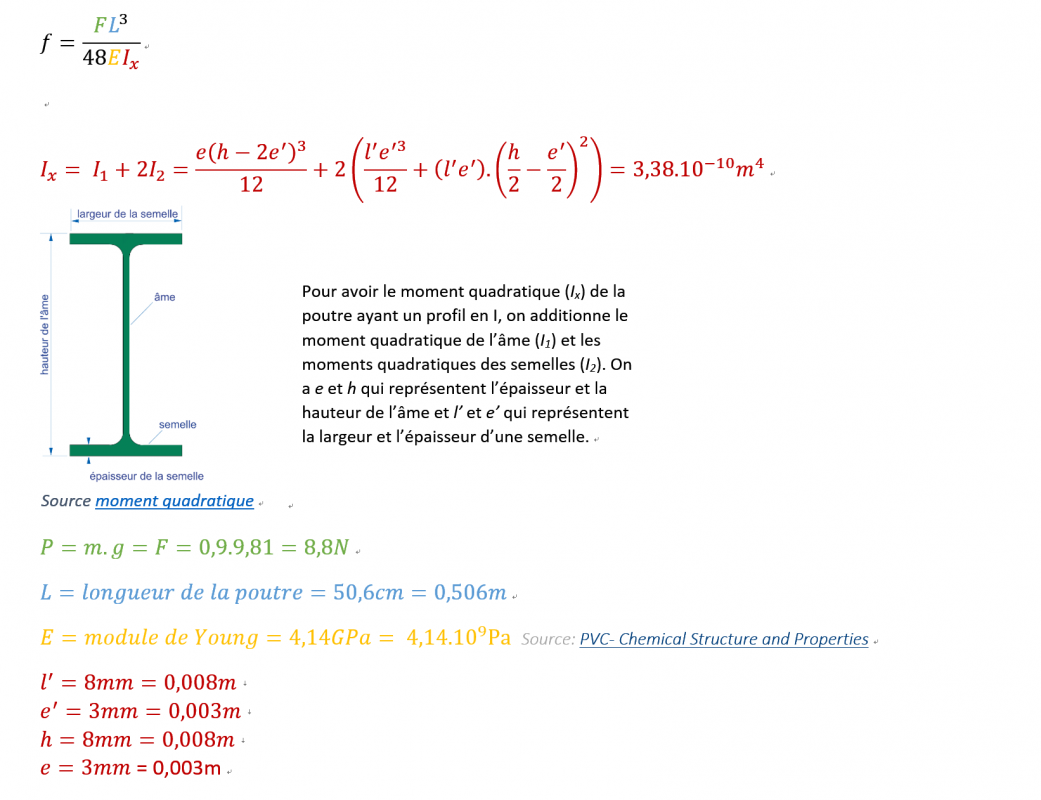
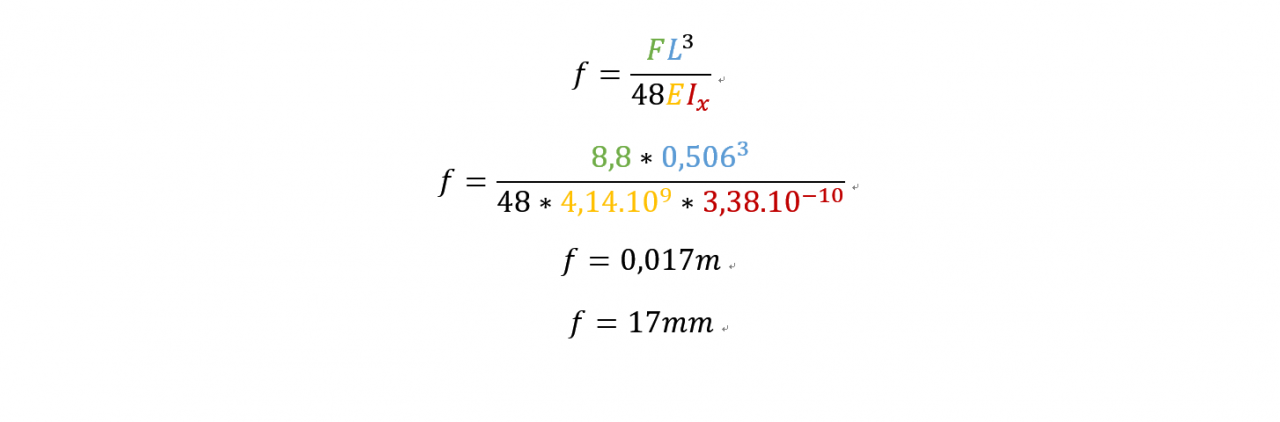
Nous trouvons théoriquement une flèche de 17mm pour un effort due à une masse de 900g placé au centre d’une poutre bi-appuyé.
Résultats expérimentaux :
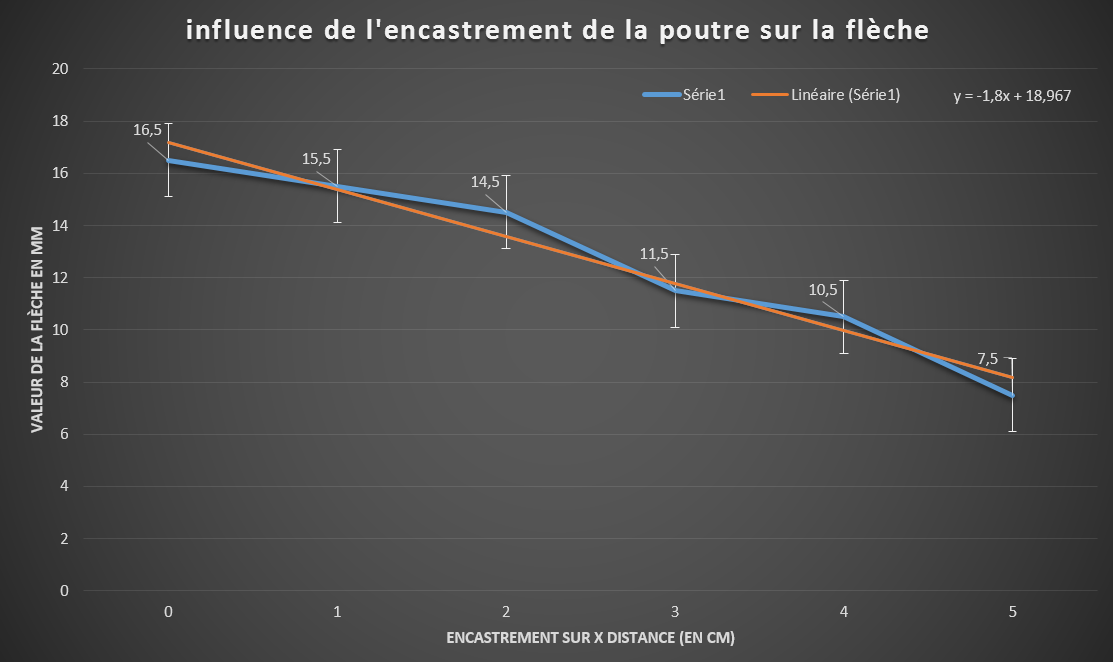
Source: LP2I
Lorsque la poutre est encastrée sur 0 cm, cela signifie qu’elle est juste appuyée sur les supports. Nous avons alors trouvé expérimentalement une flèche de 16,5mm alors que nous avions trouvé une flèche de 17mm par le calcul !
Conclusion :
Lors de l’expérience, nous avons remarqué que la flèche de la poutre était de moins en moins importante, plus on bloquait sur une grande distance les extrémités de cette dernière. Cependant, si l’ont fait ça sur une poutre d’un bâtiment, on réduit l’espace habitable, même si l’on diminue la déformation lors de la flexion. Dans le cas de notre stade, le choix a été fait de laisser en appui la poutre ce qui engendre une flèche plus importante, mais qui semble cependant négligeable. Le fait qu’elle ne soit pas encastrée permet de n’avoir aucune restriction au niveau de l’espace habitable qui serait ici l’espace comportant les gradins. De plus, cela permet d’éviter de rajouter une structure supplémentaire à monter pour encastrer la poutre.
Expérimentation 2 :
Nous avons voulu, dans cette expérimentation, voir l’importance des structures en treillis dans les structures porteuses.
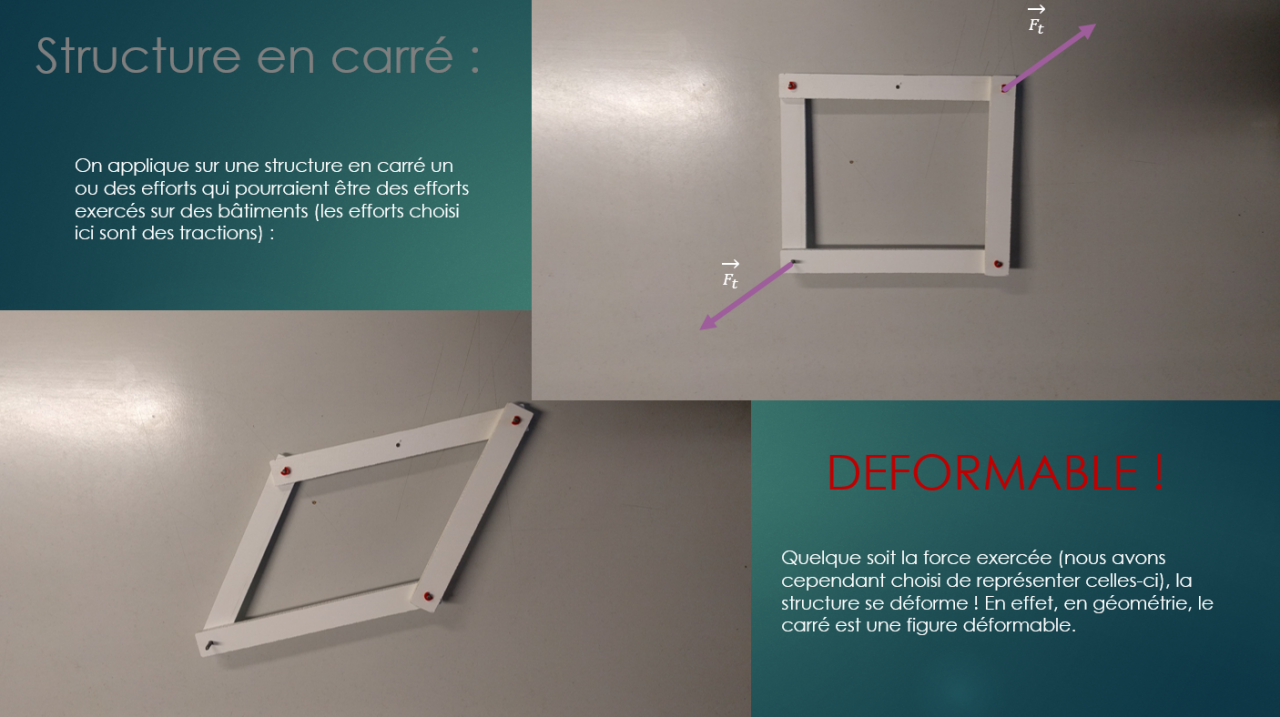
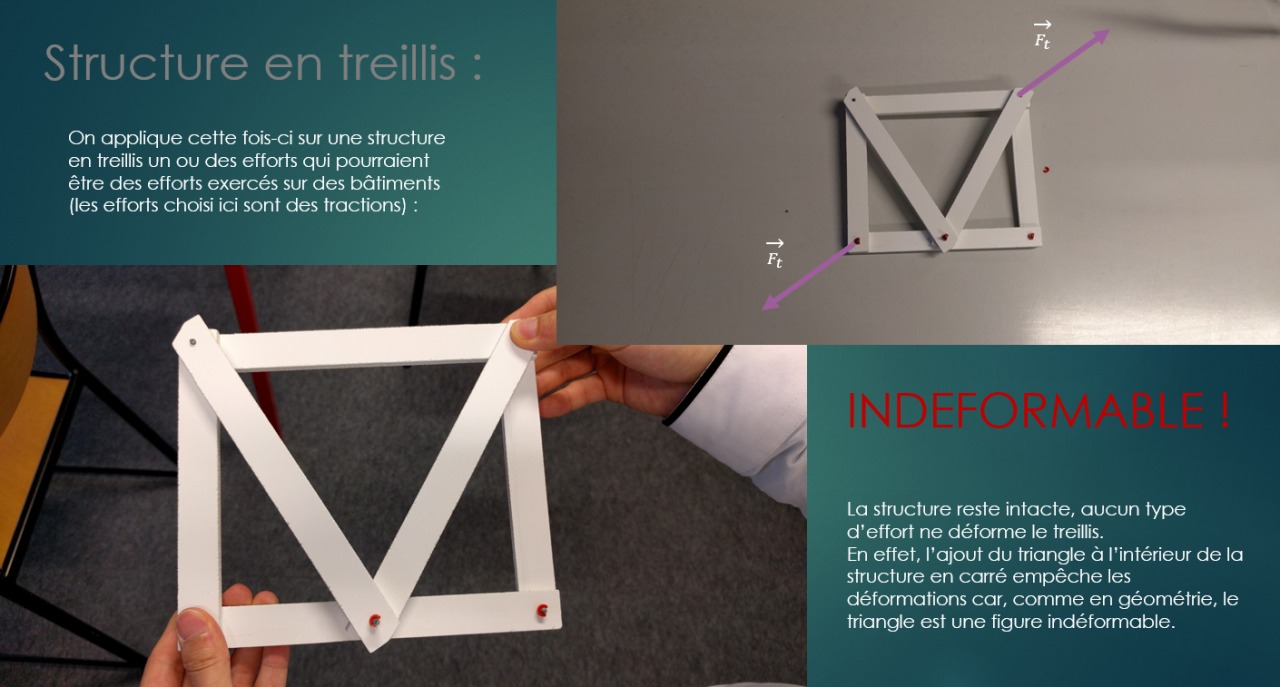
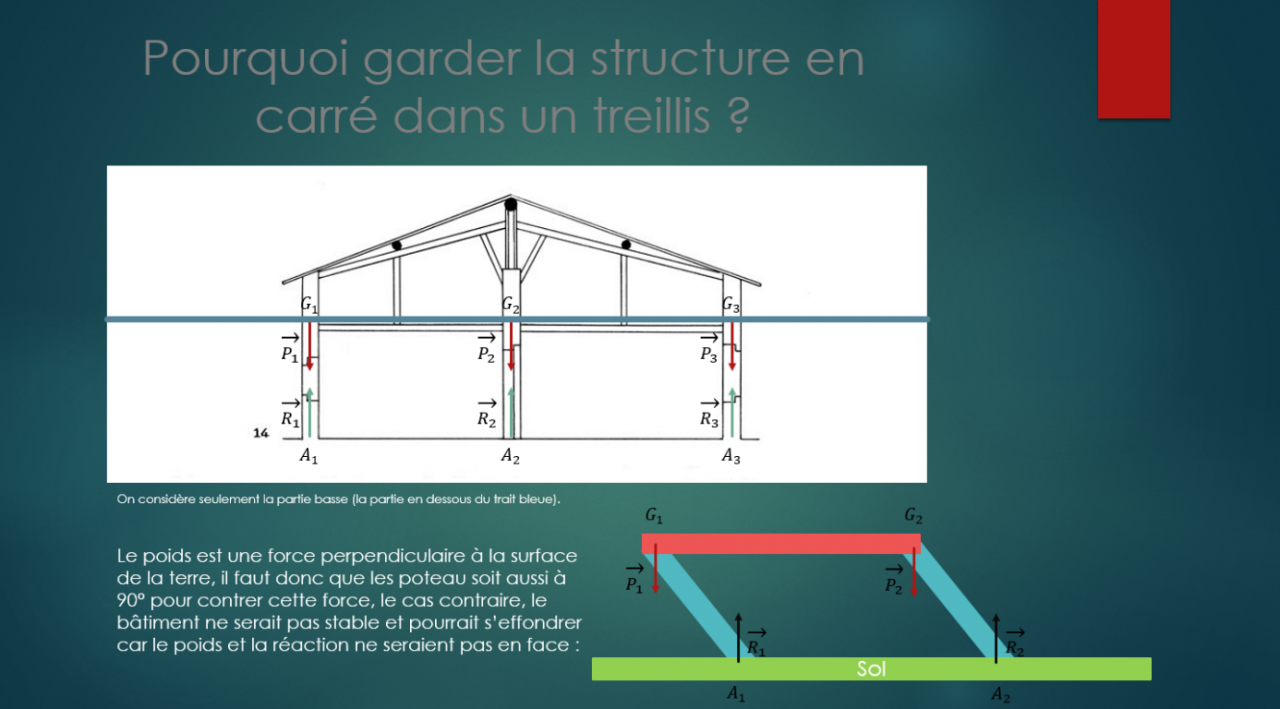
{kind=link}
{kind=link}
{kind=link}
Conclusion :
En ce qui concerne notre stade, le choix a été de faire une poutre ayant une structure en treillis. Celle-ci permet d’éviter les déformations au sein de la poutre et en plus, la structure en carré est gardée. Elle est représentée par les méga poteaux qui supportent la méga poutre, il y a un angle de 90° entre une méga poutre et un méga poteau. Les triangles à l’intérieur de la poutre permettent également de mieux répartir les efforts subits par cette dernière.
LA PELOUSE ESCAMOTABLE
Tout d’abord, nous allons vous présenter cette pelouse par le biais d’une vidéo ci-dessous. Elle présente l’installation du court de tennis dans l’enciente du stade lors de la finale de la Coupe Davis 2014.
L’escamotage s’effectue en trois partie :

Eiffage TP
-
Le levage grâce à des vérins disposés sous la pelouse 1h15 (fig.1)
- La reprise de charge durant laquelle on positionne les 24 bras articulés sur les chariots qui vont actionner la translation 20min (fig.2)
- La translation : ce sont les chariots et les vérins « push-pull » qui constitueront le dispositif de translation du plateau par « pas de pèlerin ». Chaque chariot supporte 250t en cas de défaillances. La translation s’effectue grâce à des pas de 90cm. Les vérins sont alimentés par deux groupes hydrauliques. Le contrôle de l’avancé est effectué par un système à roues codeuses 1h30 (fig.3)
Pour que la pelouse sud qui peut rester couverte plusieurs jours ne s’abime pas de son confinement, des rampes d’éclairage horticole et des ventilateurs sont installés en dessous du plateau mobile.

Système à roues codeuses – stephane.genouel.free.fr
Système à roues codeuses: La roue codeuse est un capteur de position angulaire (et un capteur de vitesse angulaire lorsqu’il est associé à une mesure de temps). Le codeur rotatif est un capteur de position angulaire. Il mesure donc une grandeur d’angle. Pour connaitre la vitesse angulaire, il suffit de chronométrer le temps mis pour parcourir cet angle.
Étude de cas N°3 – Équipe N°6 : Horloge Dragon
Remarque du chef de l’équipe N°6 de l’étude 3 : Pour précision, J’ai préféré de publier une version partielle plutôt que rien. J’ai commencé à rédiger le compte rendu dès hier. Elle serra complète avant demain soir si possible.
I/ Présentation de la machine
1/ Origine ( objets de référence )
| Watch LED | Dragon | Horloge Coucou |
|
Écran d’affichage |
Source : babelio.com |
Ressemblance avec l’ancienne pendule |
Avec notre machine, nous avons pris trois éléments qui sont :
_ L’horloge Coucou ( pour l’esthétisme )
_ La Watch LED pour l’écran d’affichage
_ Le Dragon ( il est remplacé par le coucou )
Avec ces trois éléments, on les a fusionner pour former notre périphérique.
2/ L’invention en plusieurs plans
A – L’horloge
B – Le dragon
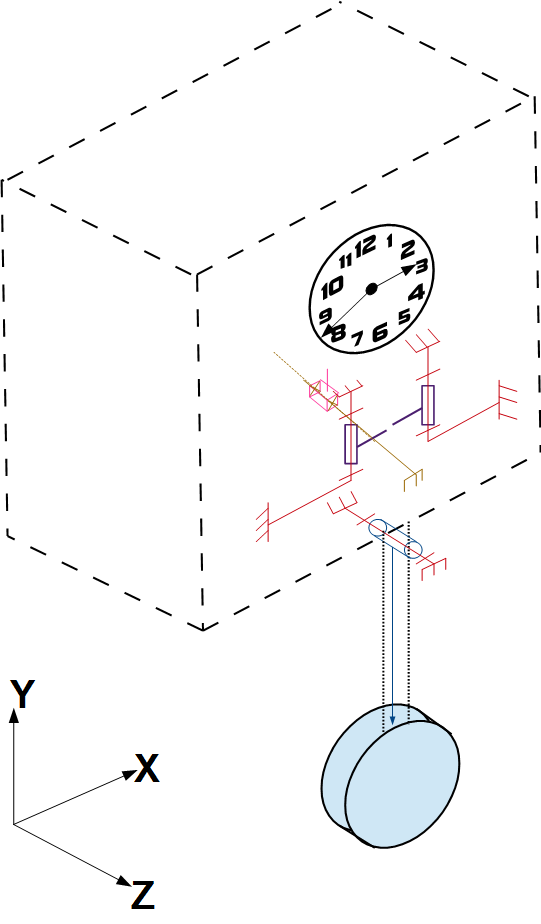
Source : LP2i
II/ Conception
1/ Schémas cinématiques & mobilités
A – Schéma cinématique d’une horloge coucou
Sans rendre le schéma complexe, nous avons décidé de réaliser un schéma simple pour mieux comprendre.
Source : LP2i
Lorsque l’alarme se déclenche, la porte s’ouvre automatiquement puis le coucou sort de sa cage. Pour une explication simple, vous pouvez visionner cette vidéo sans décrire philosophiquement : Mouvement cinématique d’une horloge coucou ( Source : Youtube )
Légendes :
Violet : Les portes ( Ry = Liaison pivot de l’axe Y )
Bleu : Mouvement de rotation avec le balancier ( Rz = Liaison pivot de l’axe Z )
Rose : Le coucou ( Tz = Liaison glissière de l’axe Z )
B – Intérieur de la boîte du diable (= dragon )
C – Intérieur de la boîte du diable
3/ Algorigrammes