Pour voir l’article précédent, cliquer ici,
et pour voir l’article suivant, cliquer là.
Source: image LP2I
Source: image LP2I

Pour voir l’article précédent, cliquer ici,
et pour voir l’article suivant, cliquer là.
Source: image LP2I
Source: image LP2I
Pour pouvoir voir l’article Xbox 360 analyse fonctionnelle, il suffit de cliquer,
et si vous voulez voir l’article Xbox 360 diagramme pieuvre du produit, c’est pareil.
Dans cet article je vais vous présenter les accessoires permettant à un utilisateur de faire fonctionner une Xbox 360 ou d’en modifier certaines fonctions selon ces envies. Ainsi que d’autres accessoires divers.
Cela se résume en neuf parties:
Tout d’abord, les périphériques principaux comme :
Ensuite Kinect qui est un capteur dont la lentille détecte les couleurs et la profondeur,
Ainsi que des manettes supplémentaires, qui sont avec ou sans fil, pour jouer avec plus de personnes, et qui ont des colories de couleurs variées ;
Puis nous pouvons ajouter des batteries supplémentaires et des câbles pour recharger la (es) manette (s) qui n’est (ne sont) pas toujours de cela,
On peut aussi ajouter un casque filaire ou Bluetooth et/ou un clavier pour pouvoir communiquer avec des personnes extérieurs,
Pour une meilleure résolution graphique un câble audio/vidéo HD ou un câble HDMI le permettent, et si le câble Ethernet est trop court un adaptateur wi-fi permet d’être connecté à internet sans être encombré d’un câble,
Pour pouvoir loger plus de jeux, de démos et autres options de divertissement, on peut ajouter un disque dur
Pour plus d’accessibilités à Xbox live qui est la boutique en ligne de la Xbox 360 on peut avoir un compte premium nommée gold,
Enfin il ne reste que les accessoires tiers tel que les éditions limitées ou d’autres produits.
<== article Sécateur INFACO
Après avoir étudier l’analyse fonctionnelle d’un système nous nous sommes intéressés au différents flux ( physique, d’informations et d’énergie ) qui les composaient.
Dans notre groupe nous avions choisi d’étudier les systèmes suivant :
– Le robot tondeur RL500 (présenté ici)
– Le Sécateur INFACO ( article précédent )
Nous allons donc faire la synthèse de l’étude du robot tondeur à partir du schéma complété en cours (cliquer pour agrandir):
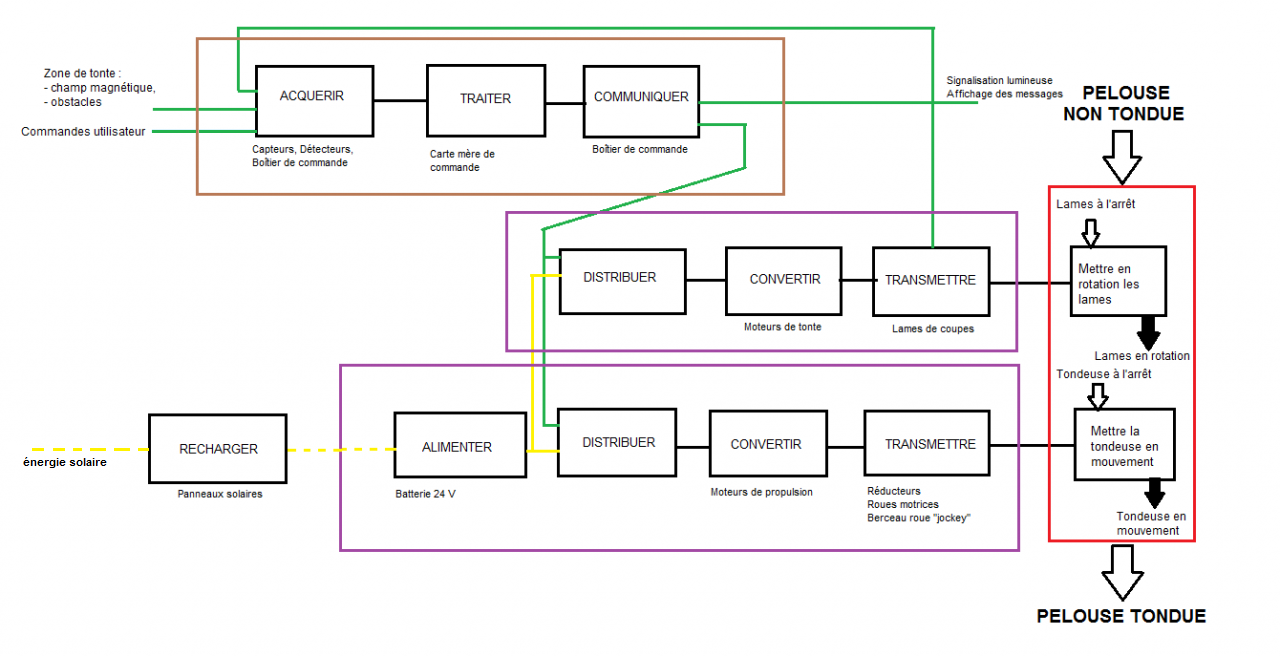
Source : Image LP2i
Légende du schéma :
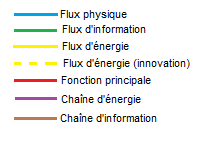
Source : Image LP2i
Sur ce schéma est présenté les différents flux et chaînes du système avec la fonction principale du robot tondeur ( en rouge ).
L’innovation présenté ici est un flux d’énergie ajouté ( flux en jaune pointillé ) par le biais de panneaux solaires rechargeants la batterie du robot fixés sur le dessus de celui-ci comme le suggère l’image suivante (panneaux solaires en bleu).

Source : ppetondeuse.e-monsite.com (modifié par Quentin.G)
Avec mon groupe nous nous sommes penchés sur les flux de la chaine d’information et puis nous nous sommes demandés quels améliorations pourrions nous faire sur le sécateur ?
Support sécateur :
Les flux de la chaine d’information :
| Flux | Entrée-Sortie | Type | Nature | Origine ou destination |
|
Consigne de marche et arrêt |
Entrée |
Physique |
/ |
Origine : Opérateur |
|
Intensité absorbée par le moteur |
Entrée |
Physique |
/ |
Origine : Chaîne d’énergie |
| Ordre de marche ou d’arrêt du moteur |
Sortie |
Information |
Logique |
Destination : Chaîne d’énergie |
Dans ce tableau la première colonne nous indique le nom du Flux, la deuxième indique s’il s’agit d’un flux d’entrée ou de sortie c’est à dire qui entre au début de la chaîne d’information ou qui sort à la fin de la chaîne. La troisième colonne indique le type de flux, nous avons trois types de flux : les flux physique, d’énergie et d’information. Pour la quatrième colonne, on indique si le type est un flux d’information, la nature : Logique, analogique ou numérique. Enfin dans la dernière colonne on indique son origine ou sa destination : opérateur, chaîne d’énergie ou autre chaîne d’information.

Le sécateur Infaco marche sur des batteries que nous portons autour de la taille, ou en cours nous le faisant fonctionner sur deux générateurs en 24V. Nous avons trouvé qu’il manquait un capteur au niveau de la batterie. Nous avons donc pensé qu’en mettant ce capteur avec un système de diode verte et rouge pour signaler à l’utilisateur le niveau de batterie du sécateur. Cela empêcherait que l’utilisateur sorte, sans batterie ou qu’il pense que le sécateur est cassé. Maintenant les tout derniers produits d’Infaco comporte un écran LED où il y a affiché le niveau de batterie.
Vidéo montrant le sécateur en marche.
présentation:
Afin d’améliorer les performances du bras nous avons eu comme idée de rajouter un système d’engrenage avec un moteur électrique qui permettrait au bras avec la pince de se déplacer du haut vers le bas mais, indépendamment du bras principal et de rajouter au milieu du bras ce même principe de système pour améliorer la mobilité de l’appareil voir le schéma ci-dessous :
mouvement avant amélioration :
mouvement après amélioration:

source:
-la SI au lp2i
–http://lyc89-fourier.ac-dijon.fr/sti2d/?p=1088
Notre bras manipulateur utilisant actuellement des vérins pneumatiques, et je me suis posé la question pourquoi ne pas utiliser des vérins électriques ?

Vérins pneumatiques : Simple et double Effet (Source : wikipedia.org)
Source : http://fr.wikipedia.org/ (Schéma d’un vérin pneumatique)
Le vérin A est un vérin simple effet : Un vérin simple effet ne travaille que dans un sens (souvent, le sens de sortie de la tige). L’arrivée de la pression ne se fait que sur un seul orifice d’alimentation ce qui entraîne le piston dans un seul sens, son retour s’effectuant sous l’action d’un ressort ou d’une force extérieure (fréquent en hydraulique).
Le vérin B est un vérin double effet : Un vérin double effet a deux directions de travail. Il comporte deux orifices d’alimentation et la pression est appliquée alternativement de chaque côté du piston ce qui entraîne son déplacement dans un sens puis dans l’autre. On vérifiera que le vérin ne sera pas soumis aux effets de multiplication de pression qui pourraient le faire éclater du côté de sa tige.

Vérin Electrique (Source : hydrokit.com)
Le vérin électrique est très souvent constitué d’un alliage en aluminium de qualité qui lui permet de résister aux conditions les plus intenses que possible. En effet, cet alliage lui permet de considérablement réduire les interférences électromagnétiques qui l’entourent. Il est de plus très léger dû à l’aluminium étant un métaux moins dense. Le vérin électrique résiste très bien à la corrosion ou la rouille soit les pires ennemies des métaux. Étonnamment ce petit vérin peut être très puissant !
-Avantages
De nos jours, les vérins électriques sont très faciles d’utilisation dû aux nouvelles technologies qui facilitent grandement certaines tâches. La vitesse de lecture et de transmission d’une action est relativement rapide et le tout peut être transmit d’une distance assez impressionnante. Par rapport, à d’autres vérins celui-ci est très sensible et précis quand il vient le temps de faire un travail de qualité. Il assure une excellente coordination avec la régulation électrique du projet. D’un autre côté, dû à sa structure assez complexe, il peut très souvent avoir des problèmes comme des courts-circuits.
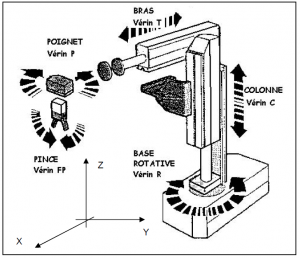
Dans cet article je vais vous faire la présentation du bras manipulateur “Schrader” :
La fonction principale de ce système est de déplacer un objet dans l’espace, en utilisant de l’énergie pneumatique grâce aux différents vérins. (Ci-dessous)
Les différents vérins sur le bras manipulateur
Source : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
Il a pour effectuer cela différentes fonctions principales ainsi que des contraintes : (Tableau et diagramme pieuvre ci-dessous)
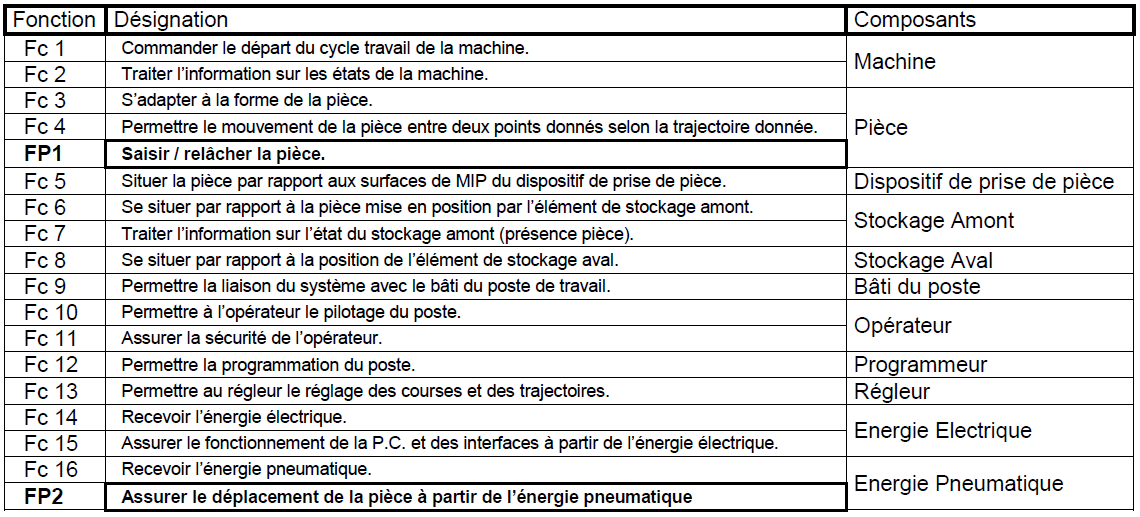
Tableau des différentes fonctions principales et les contraintes.
Sources : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
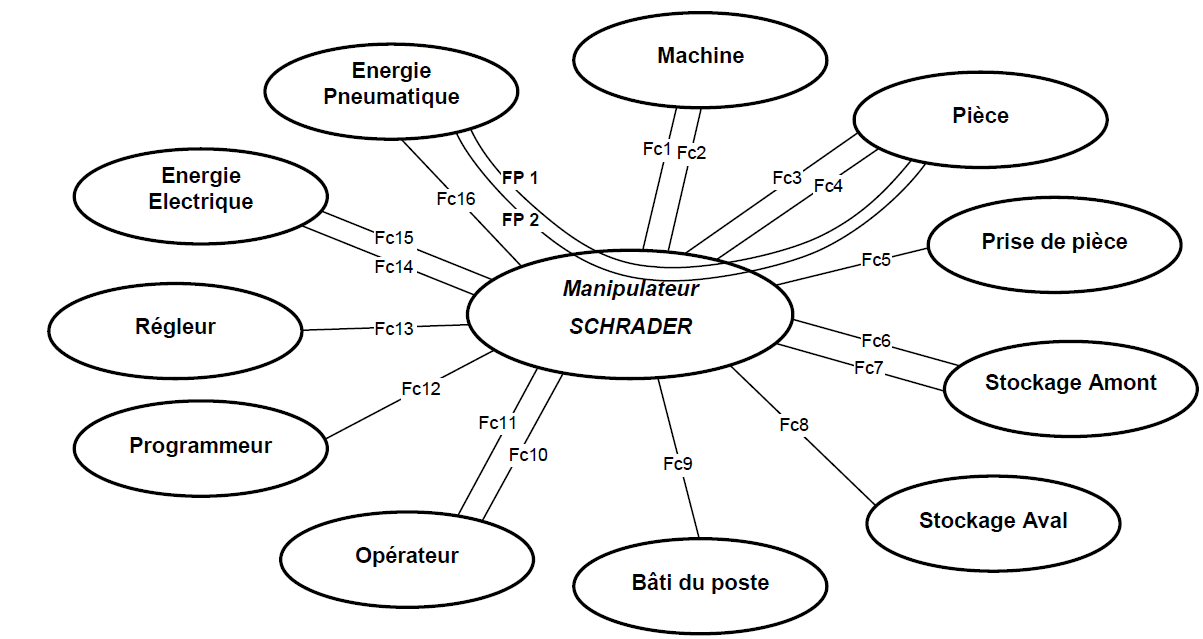
Diagramme pieuvre du manipulateur SCHRADER
Source : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
Sources : http://si.legendre.free.fr/Site%20ge1s/Atelecharger/DT_SCHRADER.pdf
Et voici ci-dessous l’architecture fonctionnelle du bras manipulateur. En rouge la chaîne d’énergie, en bleu la chaîne d’information.

Source : Lp2i
Et pour finir http://www.youtube.com/watch?v=G2b8quDijao une vidéo du bras en marche.
présentation:
Je vais dans cet article vous présenter l’architecture fonctionnelle d’une souris sans fil. Les systèmes se constituent, dans la majorité des cas, d’une chaîne d’énergie et d’une chaîne d’information. Le nombre de chaîne peut varier selon la complexité du système. Voici ci-dessous un schéma-blocs. Il permet de mieux visualiser le fonctionnement d’une souris sans fil.
schéma bloc:
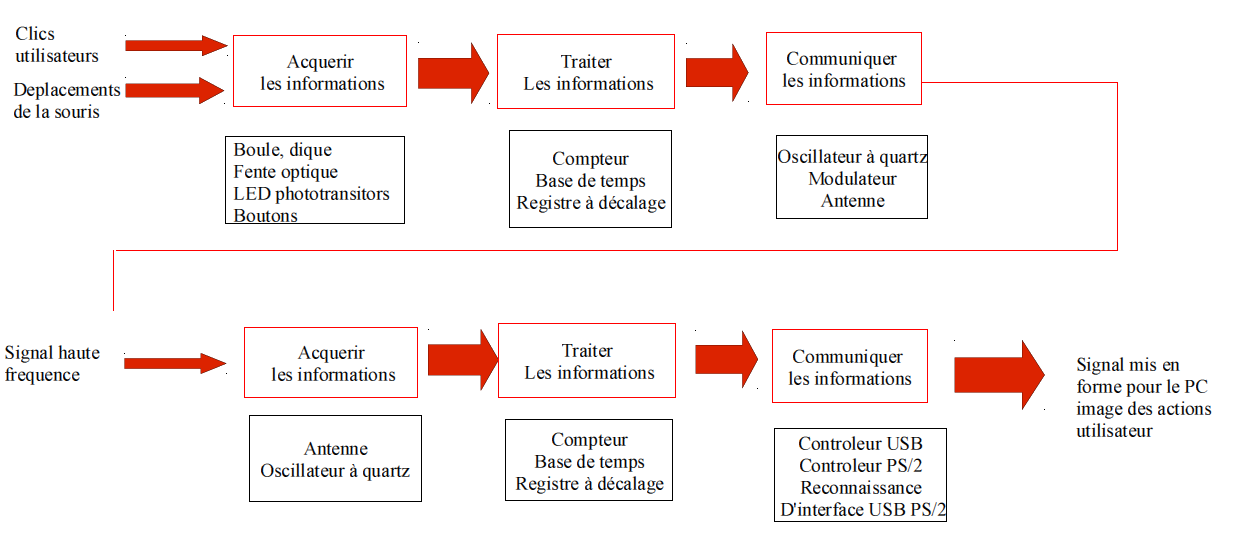
chaine fonctionnel (source:cour)
Les technologies actuelles permettent une connexion physique entre la souris et l’ordinateur, en passant par une liaison infra-rouge ou radio. Un boîtier est relié au port classique destiné à la souris et transforme les signaux reçus par le capteur infra-rouge ou radio en signaux compréhensibles par le protocole standard de la souris. La technologie radio offre l’avantage de passer par-dessus les obstacles, par rapport aux infra-rouges. On utilise un système de canaux radio pour ne pas mélanger les signaux de différents appareils. La plupart des souris sans fils sont alimentées soit par des piles, soit par une batterie/accumulateurs (souvent appelés « piles rechargeables »), qui se rechargent lorsqu’on pose la souris sur son réceptacle. Les souris sans fil peuvent avoir un temps de réponse plus long que les souris filaires.
Cette partie consiste à exposer des idées pour améliorer et ajouter des fonctions à une souris.
Idée n°1: Energie
Notre première idée serait de concevoir la souris en y intégrant une batterie interne, celle-ci se rechargerait par un système à induction sur son tapis spécifique (photo 1).

Photo 1:Tapis & Souris (jp-blog.org) (clic pour agrandir)
Ce tapis serait lui équiper d’un port micro USB pour être connecté avec un câble (Mini USB ->USB : photo 2)

Photo 2: Câble USB (pjrc.com) (clic pour agrandir)
Ainsi le câble serait à son tour connecté à un adaptateur secteur (USB -> Prise de courant : photo 3) pour avoir le choix de le brancher soit : -au PC soit -à la prise de courant.

Photo 3: Adaptateur USB (media.ldlc.com) (clic pour agrandir)
Idée n°2 : Vibrations
La seconde innovation que l’on pourrait ajouter, serait d’intégrer un vibreur qui, par le biais d’un logiciel (mis en téléchargement gratuit sur Internet) avertirait différentes alarmes comme : un réveil pour un rendez-vous, un virus est sur votre ordinateur, et bien plus !
Idée n°3 : Lumière
Pour finir nous avons aussi imaginé après avoir modifié l’intérieur, d’ajouter des fonctions à l’extérieur, comme par exemple des capteurs de contacts qui feraient que la souris ne s’allume qu’au toucher, mais aussi une LED blanche qui s’allumerait à partir du même logiciel expliqué dans l’idée n°2, de façon à éclairer une feuille, un cahier, etc.

Image de simulation d’une LED de souris dans le noir (source: LP2I) (cliquer pour agrandir)
Nous avons pu voir un exemple concret sur le site de jp-blog.org d’une souris avec le système à induction.

Fonctions de service :
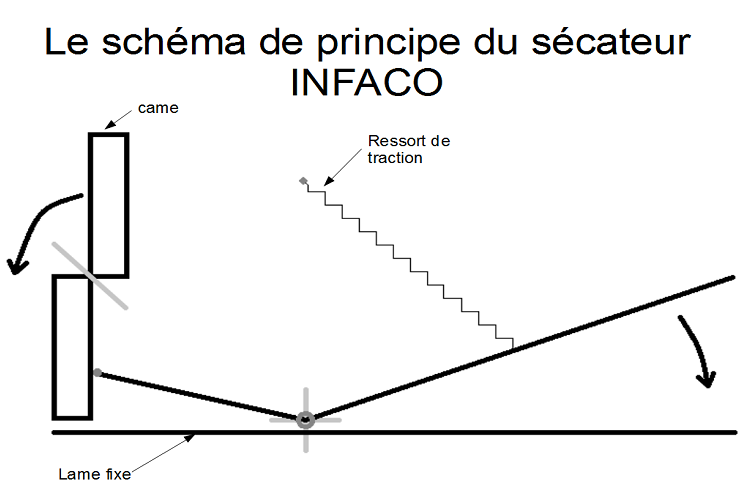
-Couper le cep de vigne.
fonctions techniques:
-faire tourner la came
-faire tourner la roue et le pignon
Chaîne d’information :
-Acquérir les informations.
-Traiter les informations.
-Communiquer le informations.
Chaîne d’énergie :
-Alimenter en énergie.
-Distribuer l’énergie.
-Convertir l’énergie.
-Transmettre l’énergie.
Constituants :
-Résistance.
-Bouton poussoir.
-Bascules.
-Portes logiques.
-Batterie.
-Transistor.
-Moteur.

-Roue.
-Pignon.

-Came.

-Ressort.
-Lame.

L’énergie électrique doit être de 48 Volt.
L’énergie mécanique doit être de 1000 Newton.
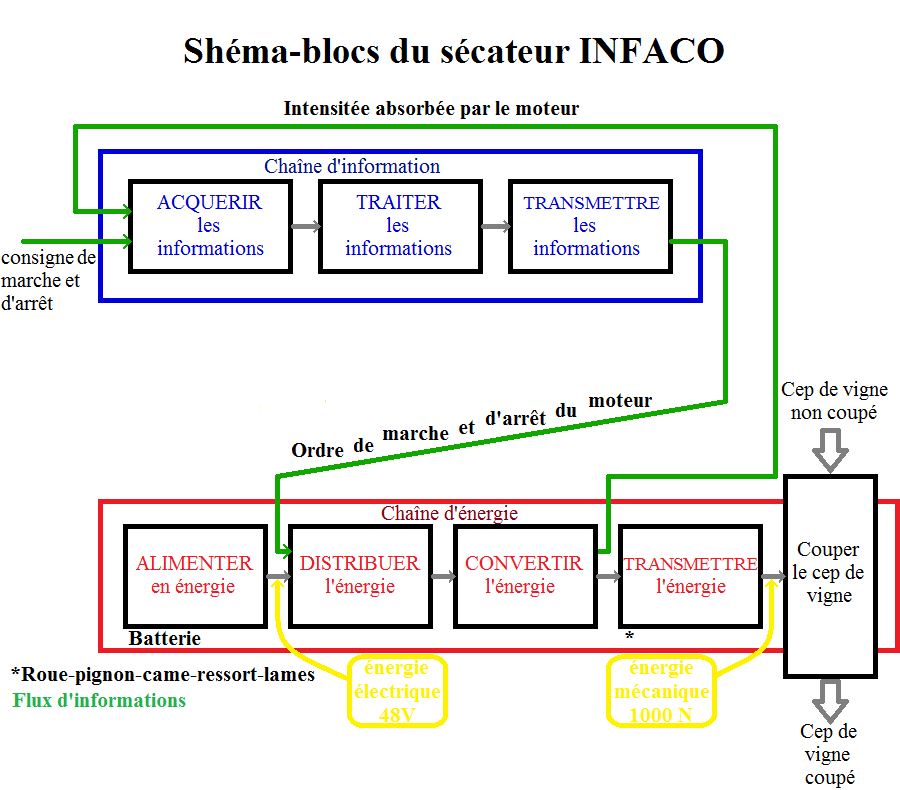
Pour couper le cep de vigne avec le Sécateur INFACO , il faut acquérir le informations avec une résistance et un bouton poussoir , les traiter avec une bascule et des portes logiques et les communiquer.
Ensuite , il faut alimenter en énergie le Sécateur INFACO à l’aide d’une batterie e 48 Volt , il faut distribuer l’énergie à l’aide d’un transistor , la convertir avec un moteur et enfin , il faut la transmettre à l’aide d’une roue , d’un pignon , d’une came , d’un ressort et d’une lame , d’une force de 1000 newton.
Diagramme bloc du sécateur INFACO:
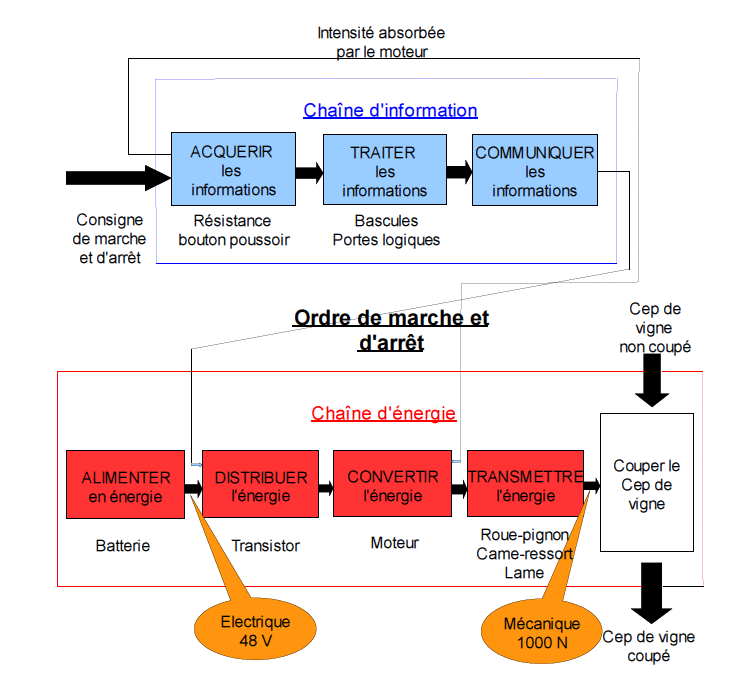
Source : image pour le LP2I
Les modifications :
Lorsque le sécateur coupe des cep de vigne , il compte le nombre de cep coupés grâce à un compteur qui compte le nombre de fois que la came a fait un tour complet.
Bibliographie :
www.webmarchand.com (lame)
www.sti.ac-orleans-tours.fr (came
www.colbertserv.lyceecolbert-tg.org (pignon)
www.shopping.cherchons.com (bascule)
www.vignovin.com (sécateur INFACO)
www.pellenc.com (moteur)
www.shopping.cherchons.com (batterie)
Présentation:
Je vais dans cet article vous présenter une innovation technique sur le robot tondeur, système étudié en classe de première sous forme de TP. Cette innovation vise à améliorer les performances de ce système.
L’innovation:
Le système actuel est équipé d’une batterie en plomb, qui comporte plusieurs désavantages: batterie lourde, ne supporte pas les décharges profondes, autodécharge quotidienne ( 1% par jour environ ).
En remplaçant la batterie actuelle par un modèle en lithium le système gagnerait en performance.
Explication:
La batterie en lithium est plus légère, ne s’autodécharge que très peu ( 5% par mois ), résiste à un nombre de cycles ( recharge/décharge ) important ( 1500 cycles pour les plus performantes soit 3 fois plus qu’une batterie en plomb)
Pour ce qui est de l’architecture fonctionnelle, cette innovation modifie la chaîne d’énergie, c’est la fonction technique stocker l’énergie qui est affectée.
Le poids réduit de la batterie permettrait au moteur d’utiliser moins d’énergie pour tracter le robot tondeur ce qui augmente l’autonomie du robot, avec autant d’énergie il peut donc faire plus de trajet. Au niveau écologique, il faut que la batterie en lithium soit correctement recyclée au moment de l’élimination du produit .
Pour plus d’informations sur les batteries vous pouvez vous rendre sur www.velo-electrique.com
Présentation:
Je vais dans cet article vous présenter l’architecture fonctionnelle du sécateur électrique. Les systèmes se constituent, dans la majorité des cas, d’une chaîne d’énergie et d’une chaîne d’information. Le nombre de chaînes peut varier selon la complexité du système.
Le sécateur électrique:
Le système du sécateur électrique est constitué d’une chaîne d’énergie et d’une chaîne d’information .
Voici ci-dessous une représentation de l’architecture fonctionnelle du sécateur par schéma-blocs. Il permet de mieux visualiser comment le flux physique issu de la consigne de marche/arrêt se transforme au fil des différentes chaînes en un flux physique qui permet la coupe du cep de vigne.
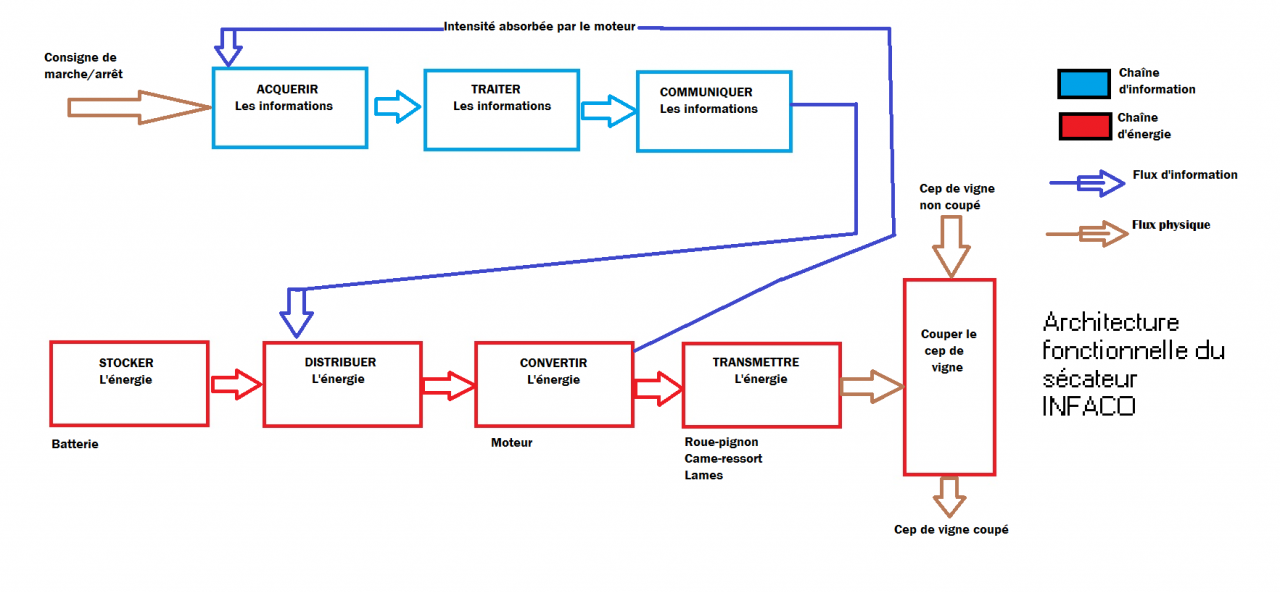
Schéma-blocs de l’architecture fonctionnelle du sécateur
Photo LP2I
Cliquez sur l’image pour accéder à une version HD
Un des grands problèmes de la souris sans-fil est son temps d’autonomie, alors pourquoi ne pas la recharger grâce à l’énergie cinétique qu’on lui confère en utilisant le principe de la piezo-électricité.
Qu’est-ce que la piezo-électricité ? Et bien figurer vous que même si le mot parait compliqué, c’est tout simple : à la pression, le capteur d’énergie perd un peu d’énergie en se contractant pour ensuite en regagner beaucoup plus lors de la dépression, comme montrer sur le schéma qui suit avec la tension libérée.

Schéma du système de piézoélectricité
Source : wikipédia.fr
Par la suite on pourrait donc utiliser ce système sur un tapis de souris et un système de transmission d’énergie par supraconduction (sujet assez compliqué, c’est la transmission d’électricité grâce aux champs magnétiques). Ainsi notre souris sans fil serait entièrement autonome. Cette innovation est le premier maillon de la chaîne d’énergie.
Je vais vous parler du cycle de vie d’un produit de l’étude de marcher à son élimination.
Tout d’abord, la première des choses à faire pour créer un produit est d’élaborer le cahier des charges fonctionnelles (cdcf) dans lequel est détaille précisément le produit. Après avoir valide le cdcf il est presque impossible de retourner en arrière. Ensuite une étude de marcher est faite pour regarder la concurrence (http://votrebrosseadentelectrique.com/) sur le marcher de la brosse a dent électrique. Après l’étude de marcher il y a la conception cela permet de se rendre compte de l’ergonomie de la brosse a dent électrique et de modifier ou non des détailles. Après avoir approuvé la conception la production peut commencer il faut savoir que plusieurs milliers de brosse à dent électrique sont produite par an de différente marque. Juste après la production suit la commercialisation qui consiste à introduire sur le marché la brosse a dent électrique (grande surface, pharmacie…) l’avant dernière étape est l’exploitation c’est le temps entre le début de la commercialisation et la fin de vie du produit. Et pour finir il y a l’élimination ou le recyclage du produit.
Je vais vous parler dans cet article de l’étendue de vente d’une brosse à dents électrique.
Nous estimerons que le nombre de personnes achetant des brosses à dents (en France) s’élève à 70 millions, l’équivalent de la population française.
Cet objets intervient dans le domaine de l’utilitaire d’hygiène, selon certaines études elle enlèverait plus de plaques dentaire qu’une brosse à dents classique. Cela est un atout majeur, et surtout un atout de vente. Sachant qu’en moyenne une brosse à dents est à changer tout les 3 mois, cela fait théoriquement 280 millions de brosse à dents vendu en 1 an en France, sont comprit dans ces 280 millions les brosses classiques ainsi que les “électriques”. Le principal défaut de ces brosses est le prix, 50 à 75 % plus chers que les dîtes, “classiques”.
La part de marché de ces brosses est d’environs 10 à 25 % en fonction des années.
Le diagramme pieuvre définit toutes les fonctions d’un produit :
– Les fonctions principales
– Les fonctions contraintes
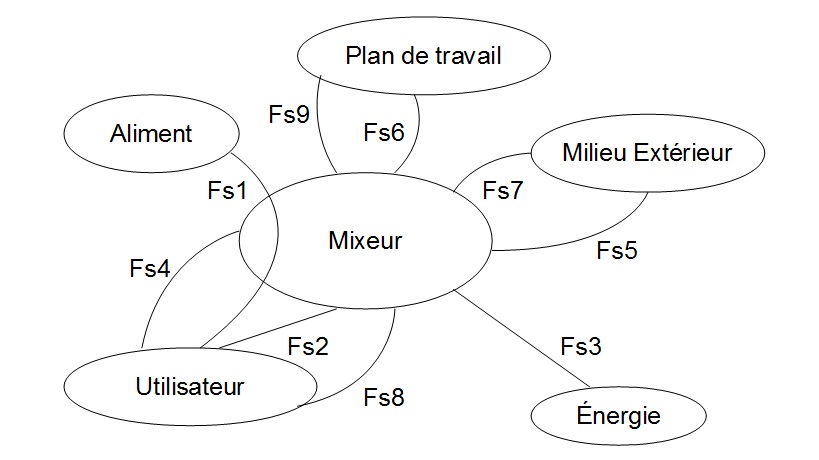
Source : Lp2i
Fs1 : Mixer
Fs2 : Obéir aux ordres
Fs3 : Avoir une alimentation efficace
Fs4 : Être esthétique
Fs5 : Respecter l’environnement
Fs6 : Présenter un encombrement minimum sur la surface de travail
Fs7 : Respecter des normes en vigueur
Fs8 : Être ergonomique
Fs9 : Facilité d’utilisation
La brosse à dent électrique a pour visé tous les ménagers qui se brossent les dents.
Elle permet un brossage de dent automatique et son environnement est donc un environnement buccal et on la retrouve dans une salle d’hygiène (salle de bain).
Par rapport à une brosse à dent classique, la grande différence se note sur la rotation automatique des poils de cette même brosse à dent, mais en contre-partie il faut s’alimenter en énergie électrique, il y a donc besoin d’une batterie.
La brosse à dent électrique apporte ainsi une facilité d’utilisation et un brossage réguliers.

Présentation succinte en image
Voici quelques liens vers des documents qui complètent le cours sur les chaînes fonctionnels :
– Chaîne d’information et chaîne d’énergie. Source : balandier.nicolas.free.fr. Document synthétique avec liens vers l’analyse fonctionnelle d’un système.
– Chaîne d’information et chaîne d’énergie (pdf). Source : académie de Bordeaux. Avec un exemple, une porte de garge automatique.
– Chaîne d’information (pdf). Source : Lycée Turgot, académie de Limoge. Se limiter pour le moment aux 3 premières pages.
– Chaîne d’énergie (pdf). Source : Lycée Turgot, académie de Limoge. Les différents exemples seront approfondis dans le courant de l’année.

Fonctions de service :
-lire un DVD.
-Enregistrer un fichier sur un DVD.
Fonctions techniques :
-Motoriser le système de rotation.
-Faire tourner le système de rotation.
-Faire tourner de DVD.
-Faire refléter le laser sur le DVD.
-Lire plusieurs formats de DVD.
-Convertir un fichier d’un disque en image.
-Relier le lecteur DVD à une télévision.
Constituants :
-Carte électronique.
%20-%20HL-802_2.jpg)
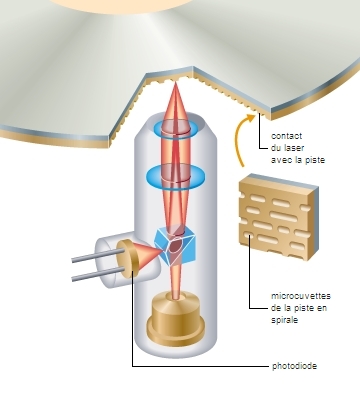
-Laser.

-Système de rotation.

Fonction d’estime :
-Être facile d’emploi.
-Être peu encombrant.
-Être esthétique.
-Être ergonomique.
Pour lire un DVD , le lecteur DVD doit contenir une carte électronique , un laser , un système de rotation , etc…
Ensuite , il faut faire tourner le DVD en le plaçant sur l’axe de rotation. Il faut ainsi motoriser le système de rotation. Après , il faut allumer le laser qui va se refléter sur le DVD et qui va convertir le fichier enregistrer dans le DVD en image.
Enfin , il faut relier le lecteur DVD à une télévision à l’aide d’un câble afin de visualiser le fichier enregistré dans le DVD.
Bibliographie:
–www.vulgarisation-informatique.com (information sur le produit)
-www.wikipedia.org (information sur le produit)
-www.exposemultimedia.wordpress.com (photo lecteur DVD)
-www.larousse.fr (photo laser)
-www.escale-numerique.com (photo laser)
-www.buyland.fr (photo carte électronique)
-www.123rf.com (photo système de rotation)
Présentation:
La brosse à dents électrique est un outil qui est moins utilisé qu’une brosse à dents classique car elle coûte plus cher. De plus les utilisateurs pensent pour la plupart que le modèle électrique n’apporte que l’automatisme du mouvement de rotation mais selon certaines études il aide aussi à enlever plus de plaques dentaires.
Les fonctions de service:
Voici les différentes fonctions de service de la brosse à dents électrique :
FS1: Permettre à l’utilisateur de se brosser les dents avec l’intermédiaire de la brosse à dents.
FS2: S’adapter à la ressource d’énergie, alimentation par pile
FS3: Résister à l’usure, ( solidité, étanchéité ) ne pas encombrer.
FS4: Brosser les dents, ne pas être douloureux.
FS5: Être esthétique et surtout ergonome.
Voici ci-dessous un diagramme pieuvre permettant de mieux visualiser les différentes fonctions de service.
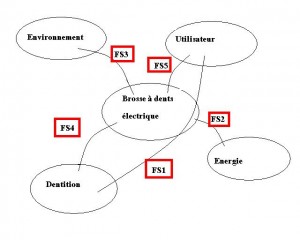
Fonctions de service entourées en rouge
Les courbes relient le système (au milieu) à l’extérieur.
Photo LP2I