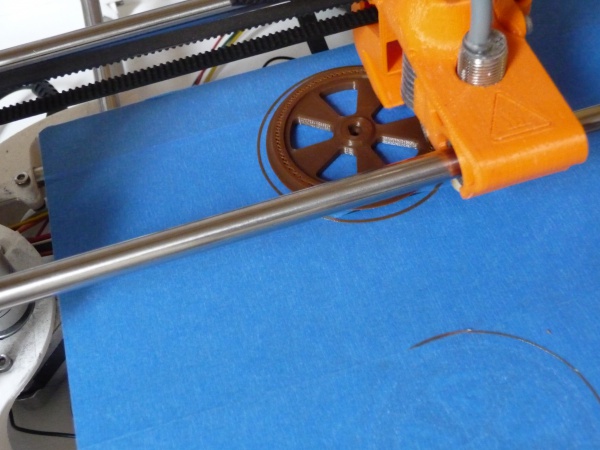
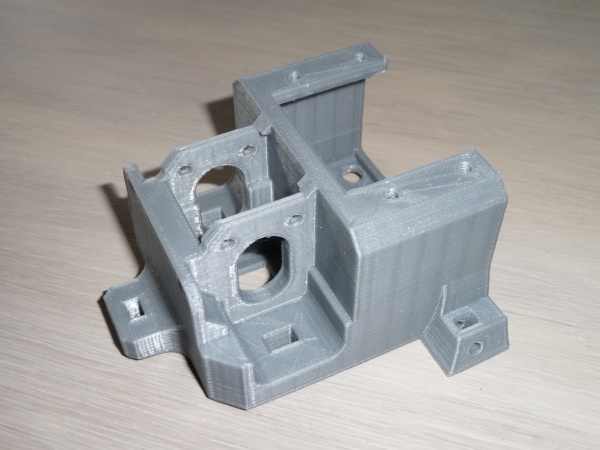
Une roue de robot encore à l’impression.
Voilà une petite idées des pièces au sortir de l’imprimante 3D !

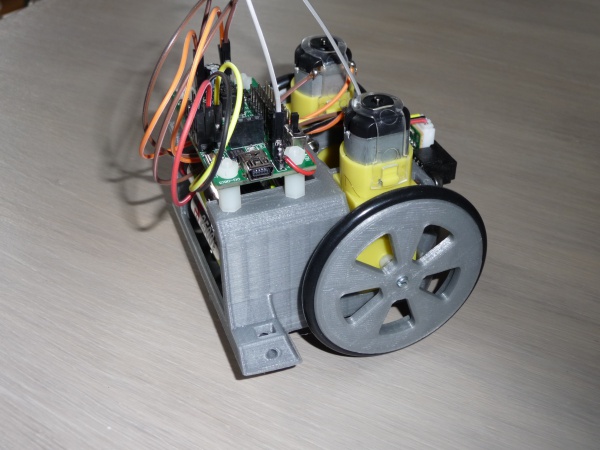
Deux roues et une bille, trois points, donc toujours stable…

Le châssis, simple et de bon aloi…
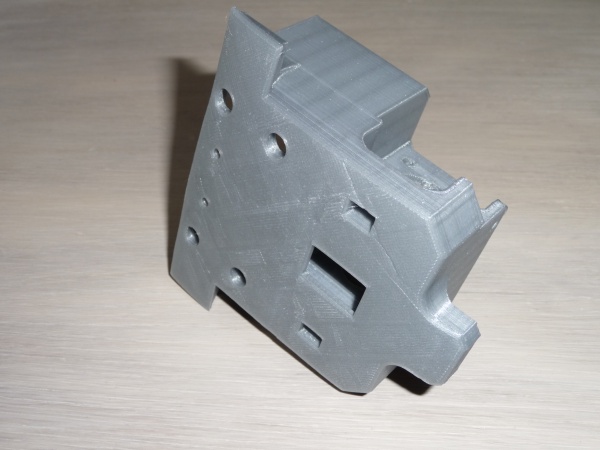
Costaud !
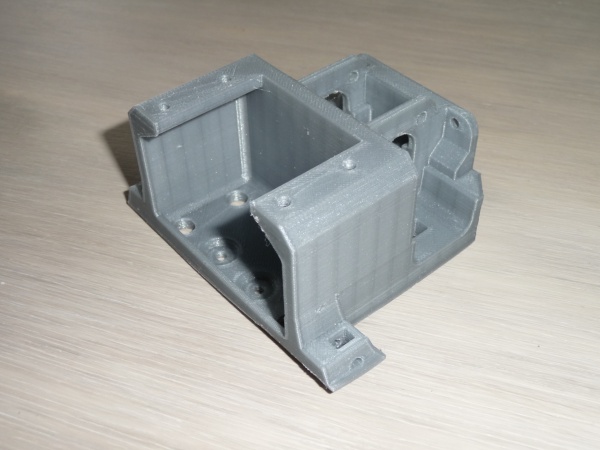
Les trois supports latéraux pour maintenir la coque.
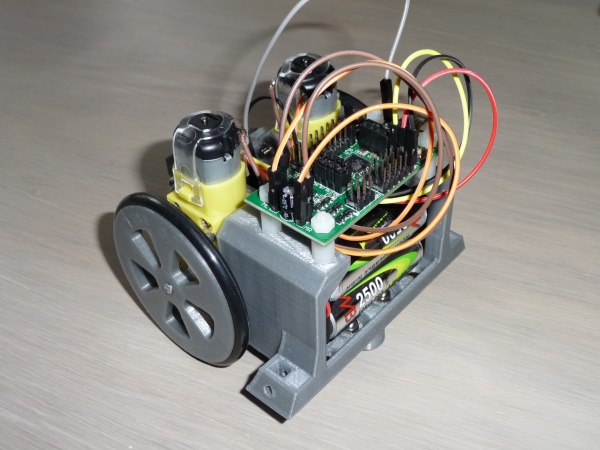
Le robot monté, l’arrière.
L’avant avec l’émetteur/récepteur infra rouge (en noir)
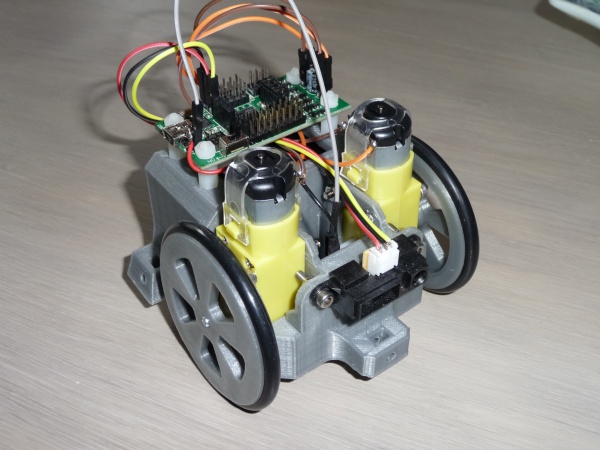
Ce capteur infra rouge permet de repérer les obstacles.
Prochaine étape, qui sera le travail des élèves, implanter un autre émetteur/récepteur infra rouge afin de suivre une ligne noire. Il leur faudra également réaliser le programme.
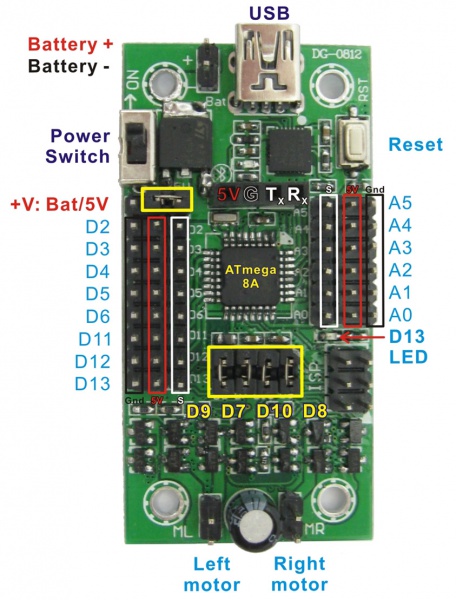
La carte avec un Atmega8 Dagu RS027, ce microcontrôleur à l’avantage d’intégrer deux commandes de moteurs av/ar. De plus, son encombrement est réduit.
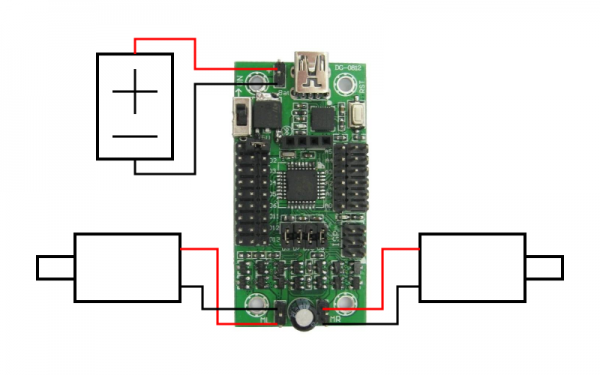
Les entrées et sorties :
Il reste de disponibles, 8 entrées/sorties numériques et 5 entrées analogiques, de quoi faire évoluer le robot !