Un tout petit robot mais qui peut en faire beaucoup, comme les grands… C’est assez incroyable de voir ce que peut faire un aussi petit robot ! Moins de 3cm de diamètre !! Il fonctionne parfaitement et le chargement des programmes se fait en le positionnant sur l’écran…
Une première photo pour avoir une idée de la taille !

Il utilise une batterie de 3.7volts de 70mAh avec une autonomie d’une heure.

Petit mais costaud… Concernant les programmes, pour le mettre en route, un appui bref et il suit les lignes, c’est le programme par défaut ; deux appuis brefs, et il suit le programme que vous avez créé, il gère donc deux mémoires…

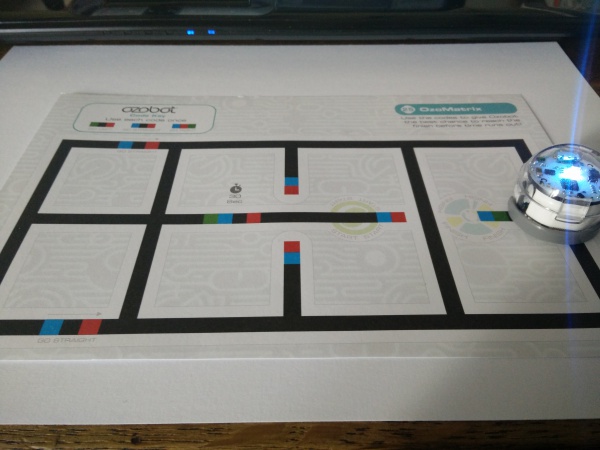
Le robot Ozobot est composé d’un module de détection optique de couleurs et de deux micromoteurs. Sur le tracé ci-dessous, les zones de couleur sont des codes pour différentes fonctions : accélérer, tourner à droite, à gauche, faire 1/2 tour, allumer la del, etc. Il suffit d’avoir une feuille blanche, les codes couleurs des actions et des feutres de couleur pour réaliser un tracé. Son aire de jeu :
A la fin, après avoir trouvé la zone d’arrivée, il manifeste en tournant sur lui-même :
Un peu plus près :

Encore :

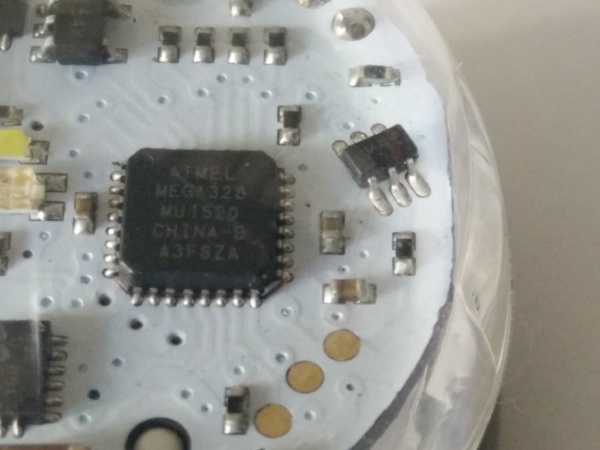
Encore plus, afin de voir que c’est un Atmel Mega 328 mu RISC, Mémoire flash 32kB, EEPROM 1kB, 2kB Ram, Fréquence max 20Mhz, CPU 8 bit AVR, 23 Entrées/sorties max :
Il peut, par exemple, suivre des tracés de couleur et adapter la Del à ces couleurs :
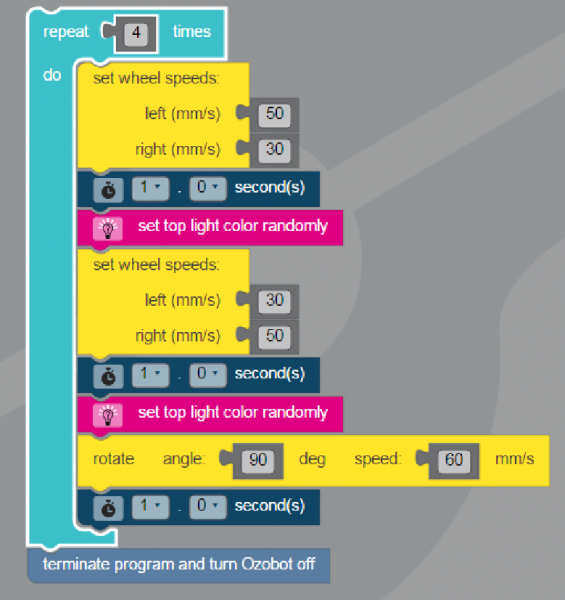
Il peut également suivre un programme :
En voici la vidéo :