La Mini-Entreprise : EATDISTRIBUTION.

Les Mini-Entrepreneurs du Collège ont été récompensés pour leur travail, ils ont reçu le prix “Challenger” lors du Salon Régional EPA des Mini-Entreprises à La Rochelle. Bravo et félicitations !


EPA Entreprendre Pour Apprendre.

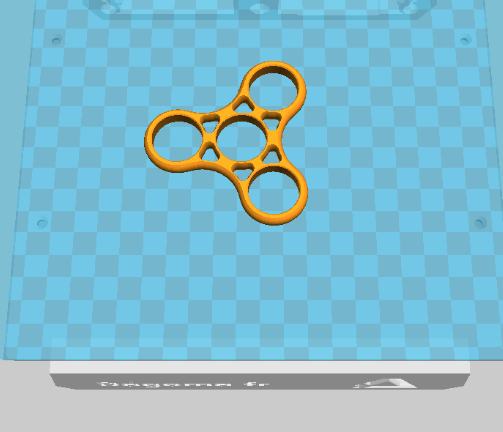
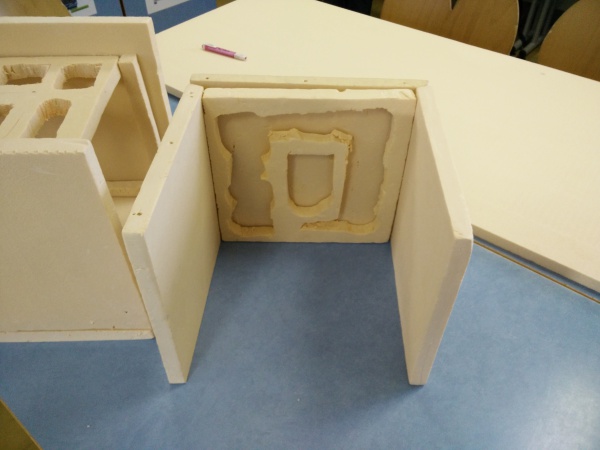
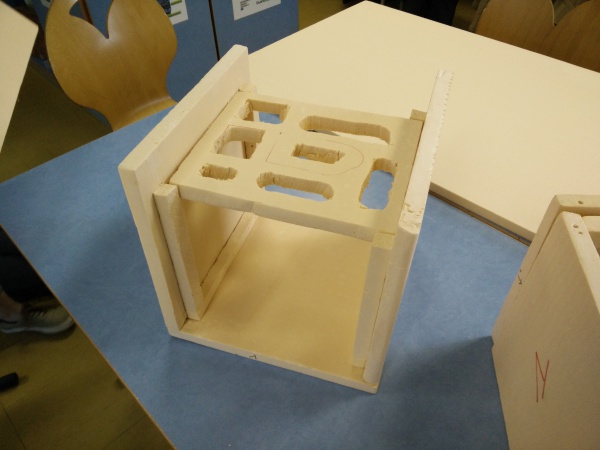
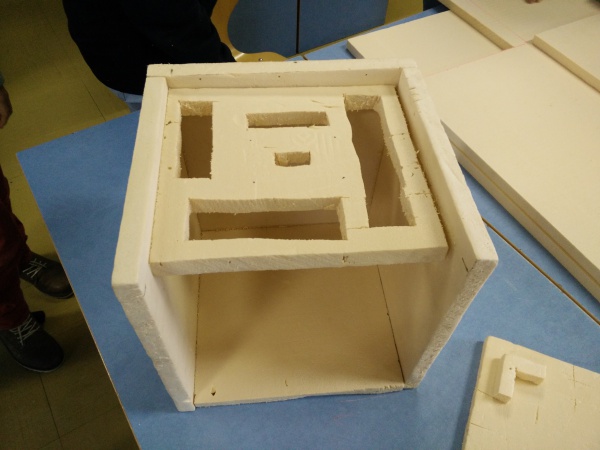
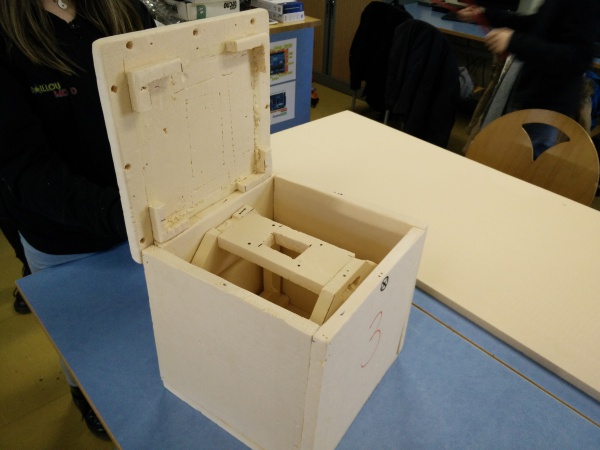
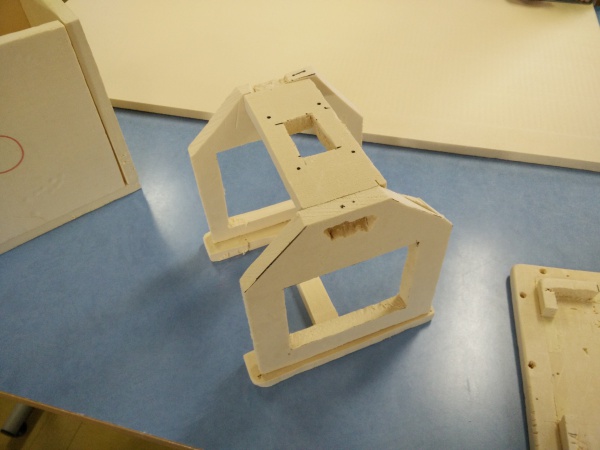
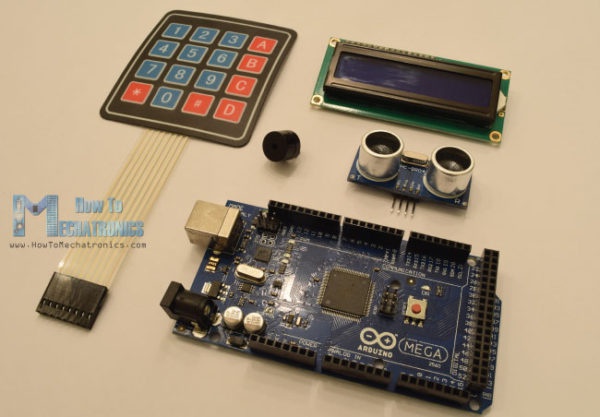
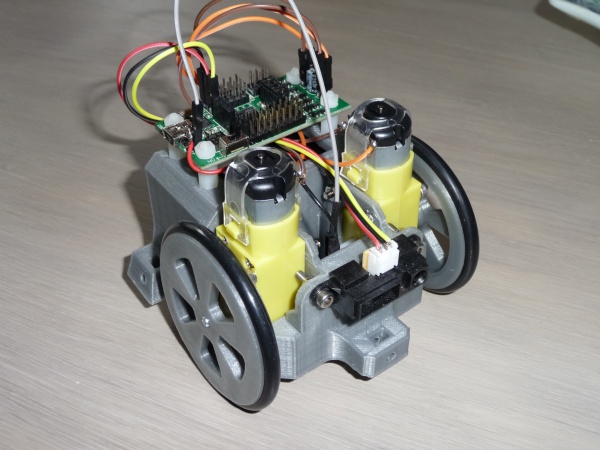
Leur produit était un Distributeur automatique et programmable de nourriture pour animaux.
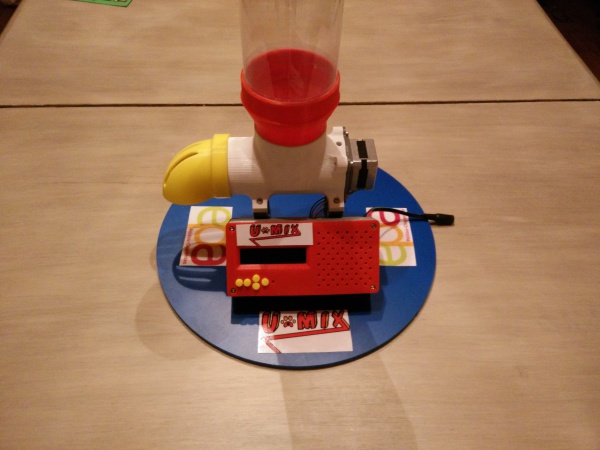
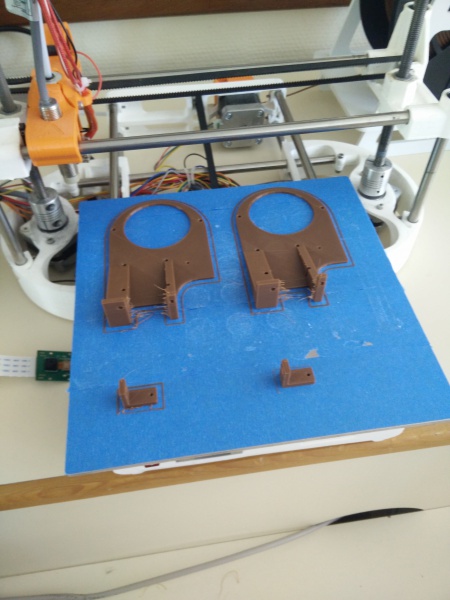
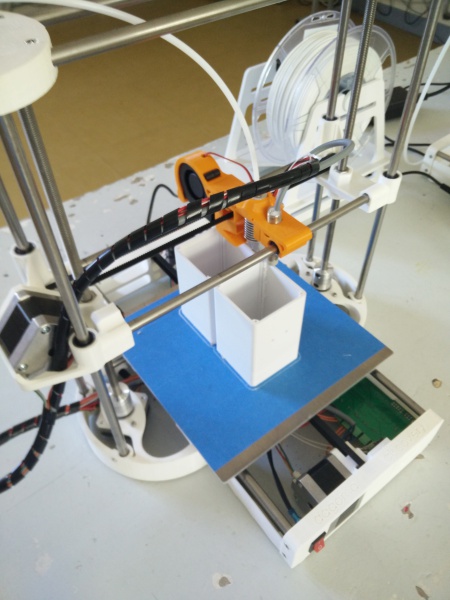
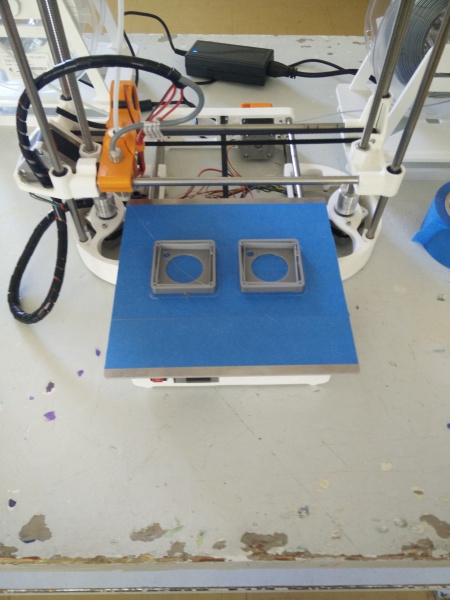
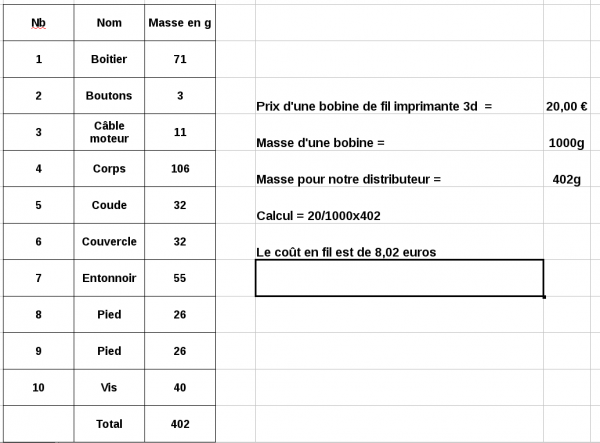
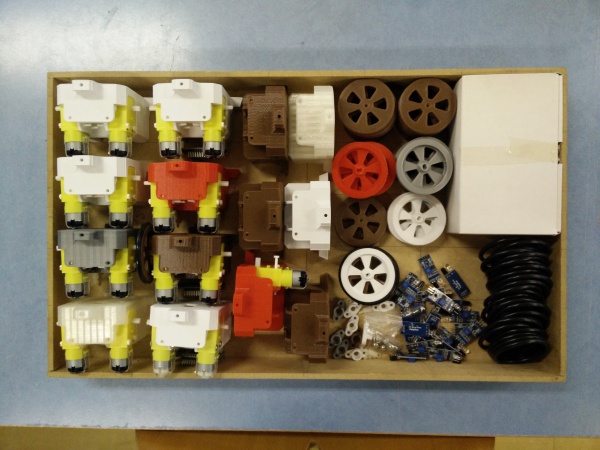
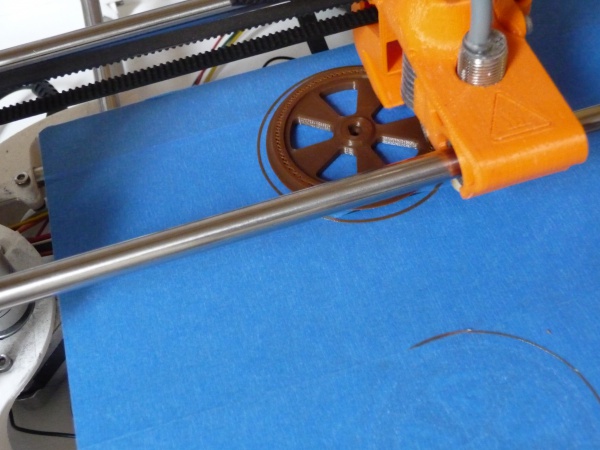
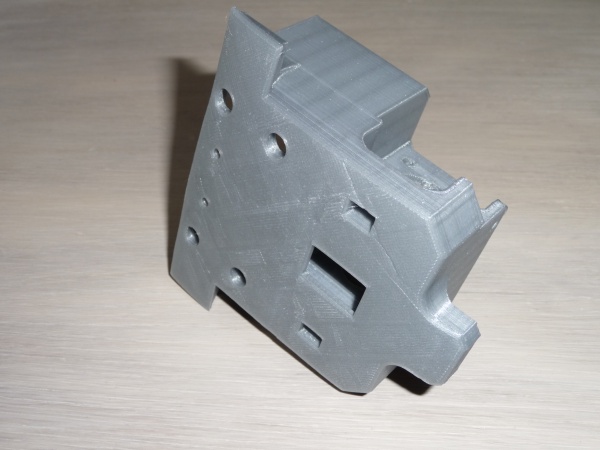
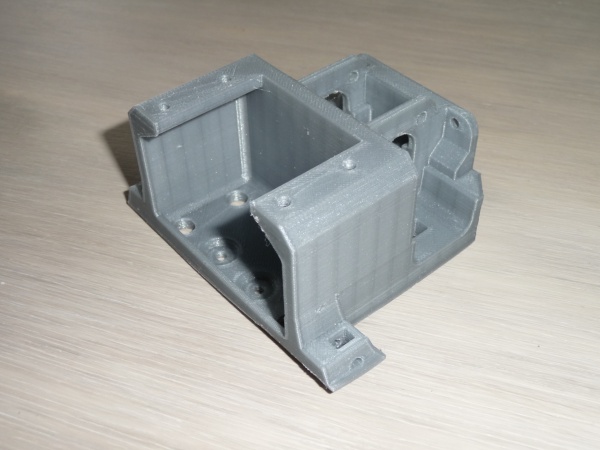
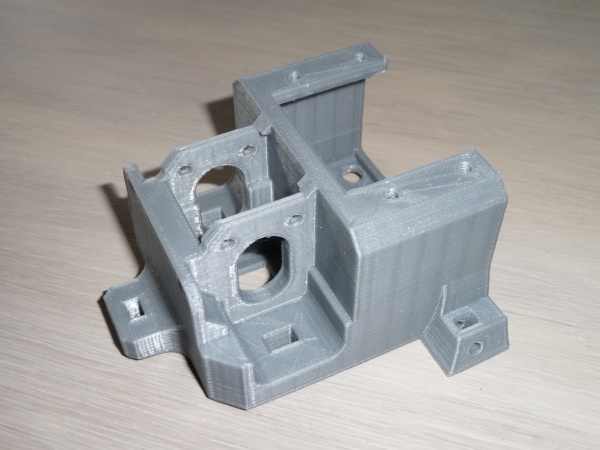
Le produit, hors électronique et mécanique, est réalisé avec une imprimante 3D et du fil PLA biodégradable à base d’amidon de maïs :

Trois jurys sont passés au stand pour l’évaluer et ont questionné les entrepreneurs en herbe sur leur produit.

Les quatre élèves présents sur les photos ci-dessus ont également présenté à un autre jury plus conséquent l’histoire et l’aventure de leur entreprise.

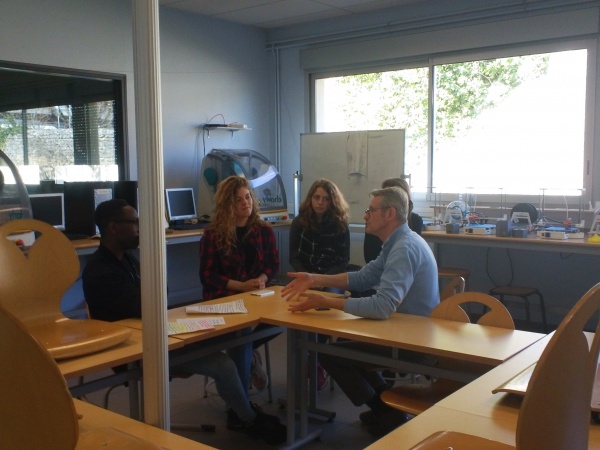
Ci-dessus, avec Didier Degrand leur Parrain, ils ont convaincu et ont donc reçu le prix “Challenger”
Logo et slogan de l’entreprise :

Ce n’était pas que l’affaire du groupe qui présentait l’oral, ici à l’entrainement avec Didier Degrand PDG de CDB Indiscrète (entreprise de création/fabrication et vente de lingerie féminine à Chauvigny). De gauche à droite, Guy, Linaëlle, Aurélie, Alexandra cachée derrière Didier :
mais le travail d’une équipe de 12 collaborateurs :

Premier rang de gauche à droite : Clémence, Léa, Aurélie, Camille, Mélina, Paul, Rémi. Deuxième rang : Nolhan, Alexandra, Guy Alex, Linaëlle.
Au travail…

Clémence qui réalise le bon de commande et la facture.

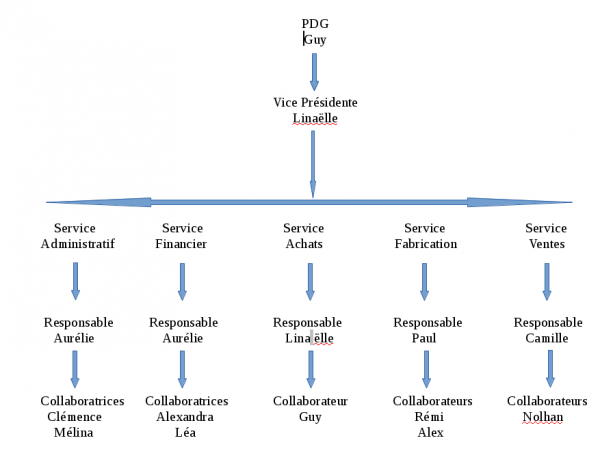
Camille et Mélina qui conçoivent la fiche d’identité et l’organigramme.
Fiche d’identité :

Organigramme :

Léa classe les documents et réalise le rétroplanning.
Rémi, Alex et Paul à la fabrication…
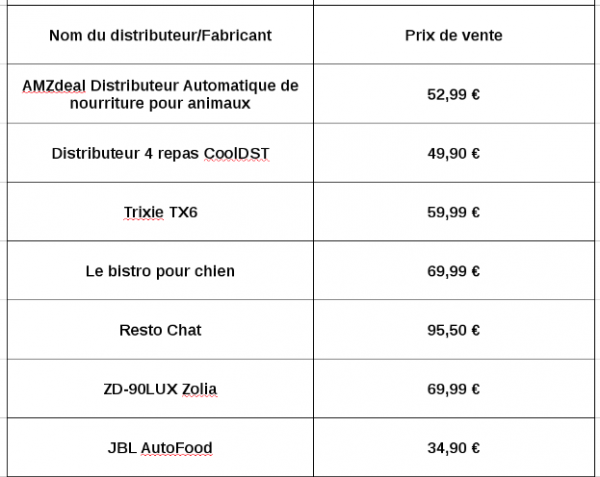
Quelques documents : l’étude de marché, de la concurrence…
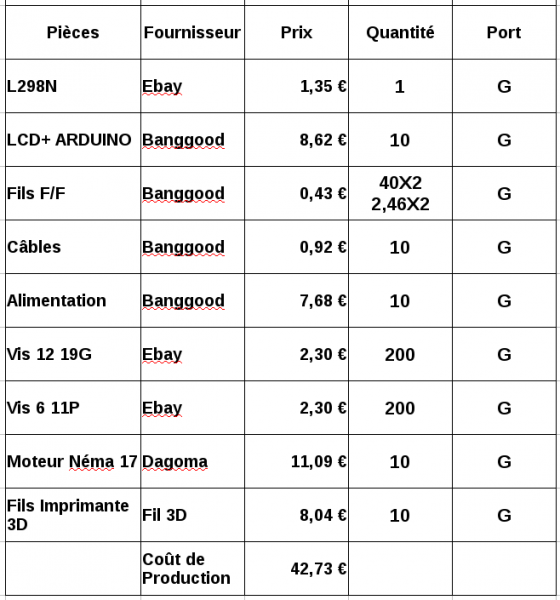
Liste des pièces nécessaires à notre produit et coûts :
Coût des pièces :
Coût du fil pour l’imprimante 3D :
Coûts et marge :
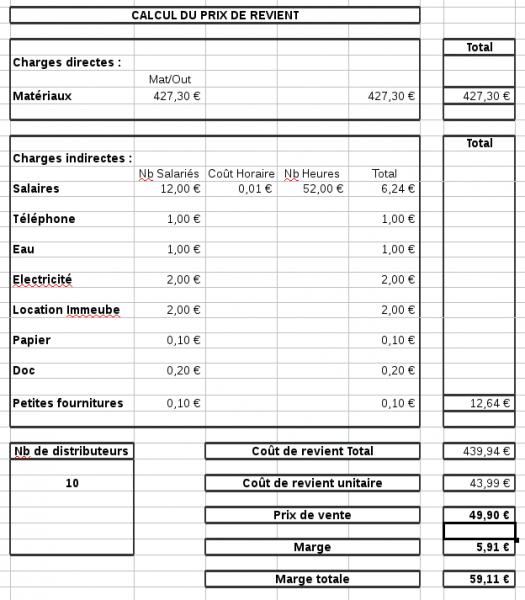
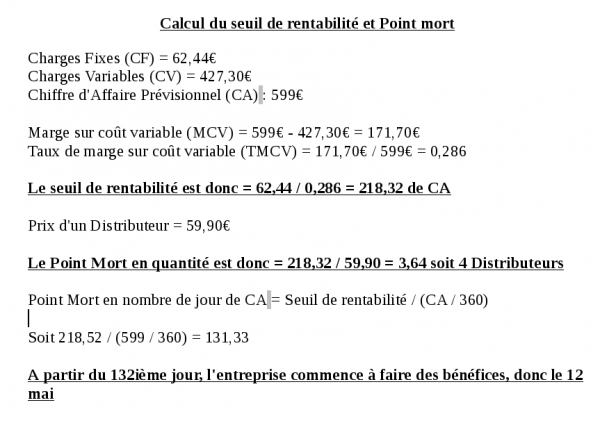
Calcul du seuil de rentabilité et point mort (on atteint là les limites des connaissances des élèves de troisièmes).
HISTORIQUE :
En septembre, nous nous sommes réunis, c’était notre assemblée générale constitutive.
Nous avons réfléchis au bien ou au service que nous allions choisir pour notre entreprise.
Nous avons eu de nombreuses idées, nous les avons listé sur un tableau et fait un choix par un vote.
L’idée qui a reportée le plus de vote fut celle d’un distributeur de nourriture pour animaux. Puis nous avons fait quatre groupes pour trouver le nom du produit, le nom de l’entreprise, le logo et le slogan, chacun des groupes à donner plusieurs propositions à l’ensemble.
Voici le résultat de nos choix :
Nom du produit : U-MIX. Prononcer YOU MIX. Avec « You » pour « Vous » et « Mix » pour l’idée du mixer, distributeur de nourriture pour animaux.
Nom de l’entreprise : Eat Distribution. Parce que « Eat » veut dire manger et « Distribution » pour l’idée de donner à manger et en même temps que nous serions fournisseurs d’un appareil le permettant.
Logo de l’entreprise : Il représente le nom du produit avec une patte de chien ou de chat entre le U et le Mix pour renforcer l’idée d’un objet pour les animaux.
Le slogan : Il fait référence au Chien d’Astérix qui est assez connu et pour faire un jeu de mot parce que pour nous réaliser notre entreprise c’est une idée fixe et faire une rime pour que le slogan se retienne mieux.
Ensuite nous avons mis en place la structure de notre entreprise, qui fait quoi, et réalisé l’organigramme. La première étape fut de lister les différents services. Des élèves ont proposé de diriger un service. Il ont préparé par écrit leur motivation puis l’ont exposé à l’oral. Nous avons fait des votes et ainsi créer notre organigramme.
Nous avons choisi notre type de produit, et réalisé l’étude de marché.
















































 située à La Chapelle-Viviers.
située à La Chapelle-Viviers.