
Mesures sur le mouvement de translation horizontal : sortir ou rentrer le bras
Source : LP2I
Conclusion sur le comportement du système : L’action de rentrer ou sortir le bras met 750 ms (soit 0.75 s) à s’effectuer après que l’utilisateur ait alimenter le vérin correspondant.
Mesures sur le mouvement de fermeture de la pince
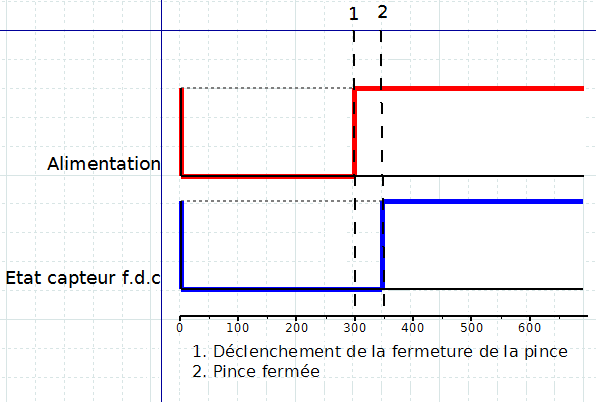
Source : LP2I
Conclusion sur le comportement du système : La fermeture de la pince met 50 ms (soit 0.05 s) à s’effectuer après que l’utilisateur ait alimenter l’unité correspondante.
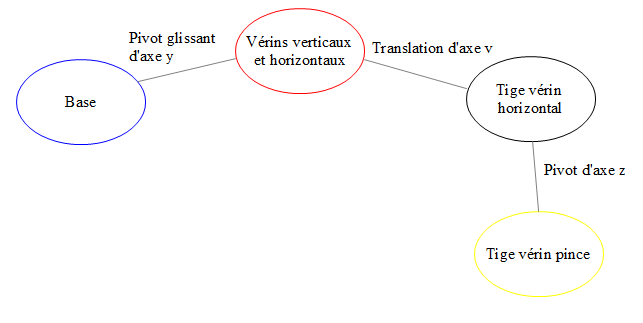
Schéma simplifié du bras manipulateur présentant les différents sous-ensembles cinématiques :

Source : LP2I
Graph de liaisons :
Source : LP2I