Pour cette étude de cas sur la télévision à écran plat, nous disposions d’une télévision LCD Samsung 32 pouces modèle LE32S81B. C’est sur cet appareil qu’on été effectuées toutes les mesures et toutes les études qui suivent.
I) Consommation énergétique
1) Consommation et variation de consommation
Sur ce modèle, le constructeur a intégré un système de réglage de l’intensité du rétro-éclairage, ainsi que plusieurs modes d’économie d’énergie, afin de faire varier la consommation énergétique en fonction du confort voulu
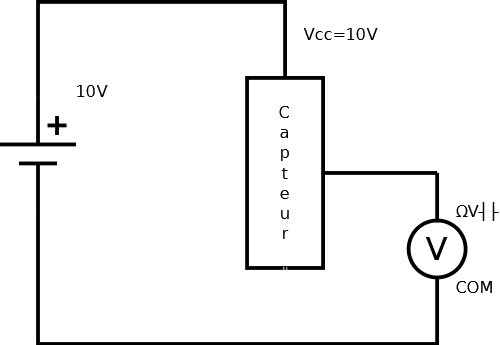
Pour connaître la puissance électrique consommée, nous avons procédé à plusieurs mesures, à chacun des mode “éco” proposés par l’appareil et pour deux niveau de rétro-éclairage (6 et 10, le réglage pouvant aller de 0 à 10). Nous avons également pris les mesures au niveau de rétro-éclairage 0 pour les deux options extrêmes du mode éco. Voici les résultats obtenus :
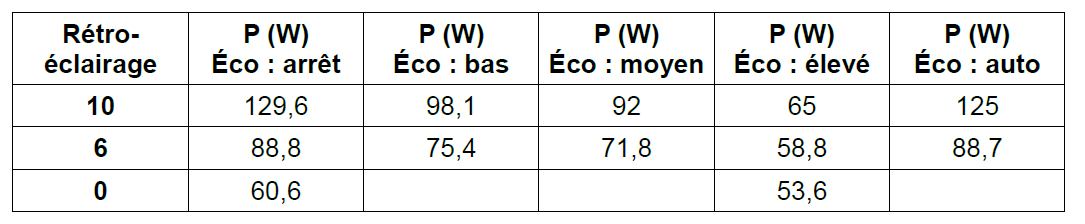
Source : LP2I
Ainsi, nous pouvons voir que le réglage du rétro-éclairage et du mode Éco peut grandement faire varier la puissance consommée par la télévision : la consommation avec les paramètres maximum (rétro-éclairage : 10 ; éco : arrêt) est environ 2,4 fois supérieure à la consommation avec les paramètres minimum (rétro-éclairage : 0 : éco : élevé)
Il est à noter que l’image affichée à l’écran a un impact négligeable sur la puissance consommée. En affichant une image blanche puis une image noire à l’écran avec des réglages identiques, nous avons pu constater que la différence de consommation s’élevait à 0,3 W, c’est-à-dire une différence négligeable.
2) Mode éco
Au cours de notre étude, nous avons cherché à savoir sur quel paramètre agissait le mode éco proposé par le constructeur afin de réduire la consommation de la télévision.
Nous avons donc émis une hypothèse :
Le mode éco ne serait en fait rien de plus qu’un autre paramètre réglant le rétro-éclairage.
Afin de la vérifier, nous avons comparé (subjectivement, à défaut d’appareil de mesure) la différence de luminosité entre deux réglages différents de rétro-éclairage et de mode éco consommant à peu près la même puissance
Notre choix s’est porté sur les réglages 6 ; élevé et 0 ; arrêt, qui présentent, malgré la différence de rétro-éclairage importante, une différence de consommation de tout juste 2,2 W.
A la comparaison, il s’est avéré que les deux réglages proposent le même niveau de luminosité.
En conclusion, nous pouvons donc dire que le mode éco est simplement un autre paramètre qui influe sur le rétro-éclairage de la télévision.
3) Indice d’Efficacité Énergétique (IEF)
En prenant pour base la puissance consommée par la télévision avec des réglages moyens (rétro-éclairage = 6 et éco : moyen), nous avons aussi calculé l’IEF de l’appareil, soit le rapport entre la puissance mesurée (P) et une puissance de référence (Pref), permettant de déterminer la classe énergétique de l’appareil.
Pref = Pbase + A * 4,3224Watts/dm² = 20 + 28,73*4,3224 = 144,182552 W
Avec Pbase = constante en fonction de l’équipement intégré et A = suface de l’écran en dm²
IEF = P / Pbase = 71,8 / 144,182552 = 0,497979811038
Cet indice classe donc notre appareil dans la classe énergétique C lors d’un fonctionnement dans les conditions de test.
II) Pertes énergétiques
Au cours de cet étude, nous avons aussi cherché à savoir où l’appareil pouvait générer des pertes énergétiques. Pour ce faire, nous avons analysé les composants de la télévision.
Avec cette analyse, nous avons pu dresser la liste suivante :
Cette télévision LCD génère des pertes :
– au niveau du rétro-éclairage. Celui-ci est assuré par des tubes CCFL, qui n’ont qu’un rendement énergétique de 20%. Le reste de l’énergie est perdu en chaleur.
– au niveau de la carte d’alimentation. La présence d’un dissipateur thermique nous indique une importante production d’énergie thermique inutile au système et qui est dissipée et donc perdue.
– On constate également des pertes au niveau de l’écran LCD, bien qu’elles soient minimes par rapport aux deux sources de pertes précédentes.