Dans cet article je vais vous présenter les risques autour du malaxeur, des sécurités ainsi que des solutions techniques qui ont été adoptées par les concepteurs du système:
1.Les risques pour l’utilisateur:
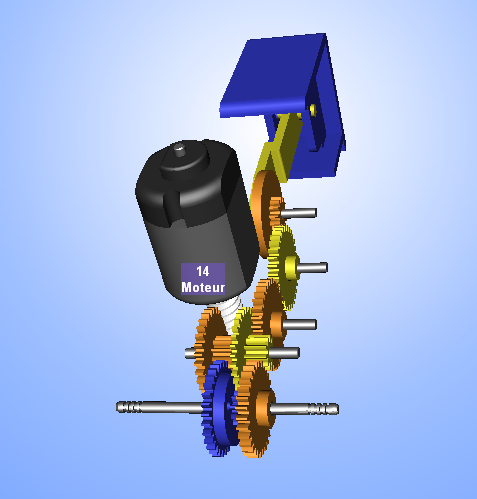
Lors de la fermeture du couvercle la main de l’utilisateur peut rester coincer, or lors de test effectués le moteur n’as pas assez de puissance pour écraser la main.
Deux hypothèses: Soit le moteur n’est pas assez puissant soit il est bridé pour fournir la puissance nécessaire uniquement pour bouger le couvercle. Il n’y a pas ce capteur qui permette de savoir si un obstacle est présent
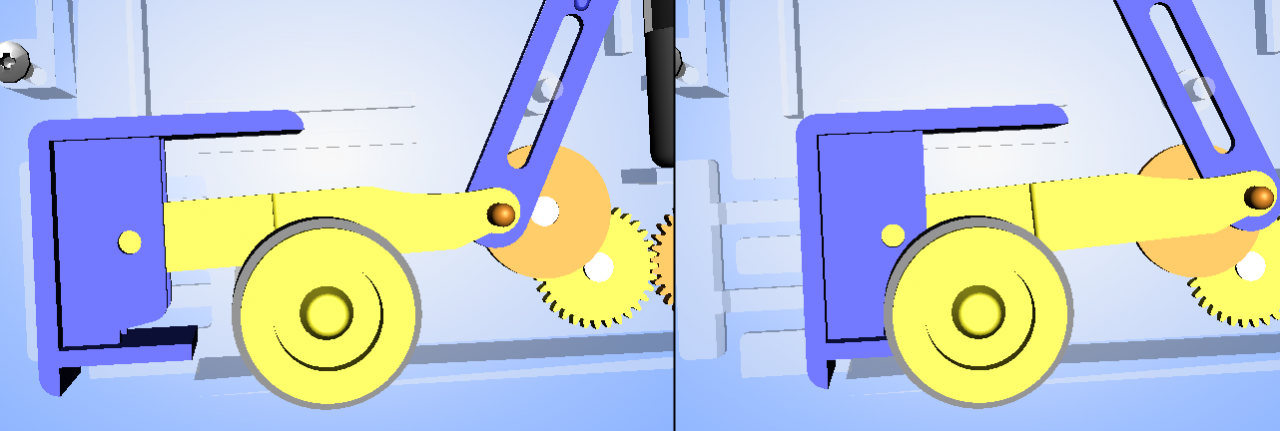
Lors de la maintenance, le pale pourrait se mettre à tourner et donc blesser l’utilisateur, pour empêcher cela le constructeur à fait en sorte que la pale puisse tourner uniquement si le couvercle est fermé.
2.Les risques pour le matériel:
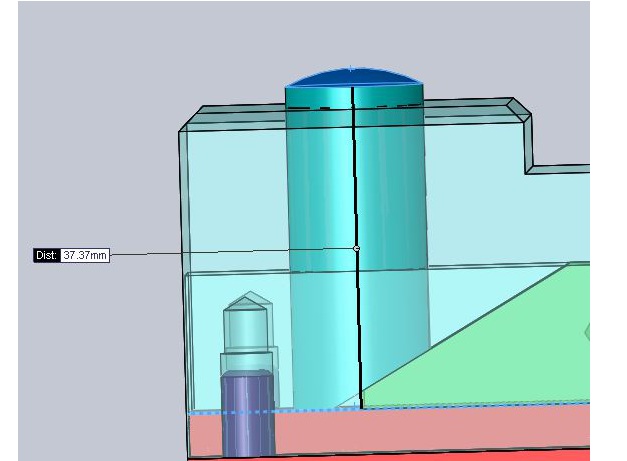
Lors de l’ouverture du couvercle, la pale peut endommager le bol si elle est mal positionnée: solution technologique: Un capteur est positionné au niveau de l’axe de la pale pour contrôler sa position.
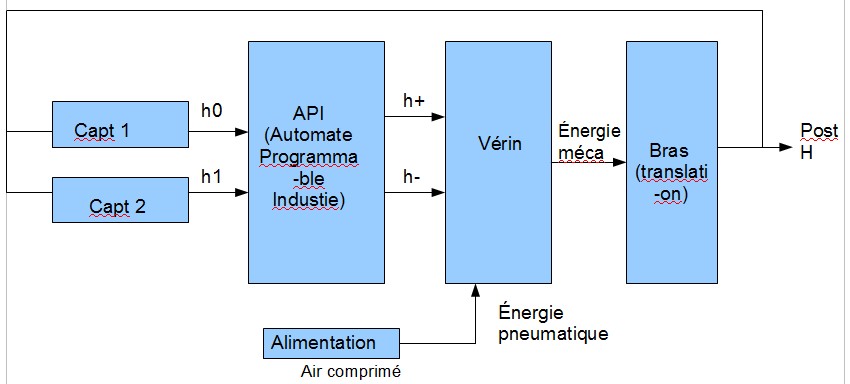
De même que pour l’utilisateur, si le couvercle lors de la fermeture( ou l’ouverture) continuait d’avancer il écraserait le bol si le couple du moteur est suffisant, comme solution technologique on retrouve des capteur fin de course en haut et en bas , FDCH et FDCB. qui envoient l’information au moteur de se couper par l’intermédiaire de la chaîne d’information.
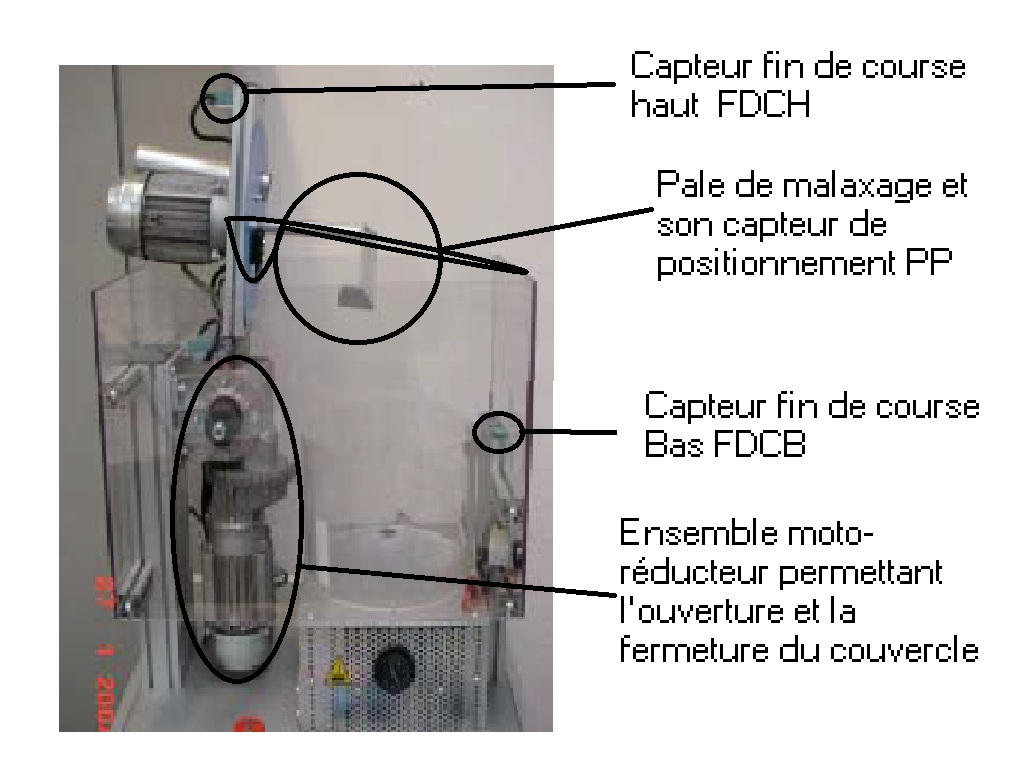
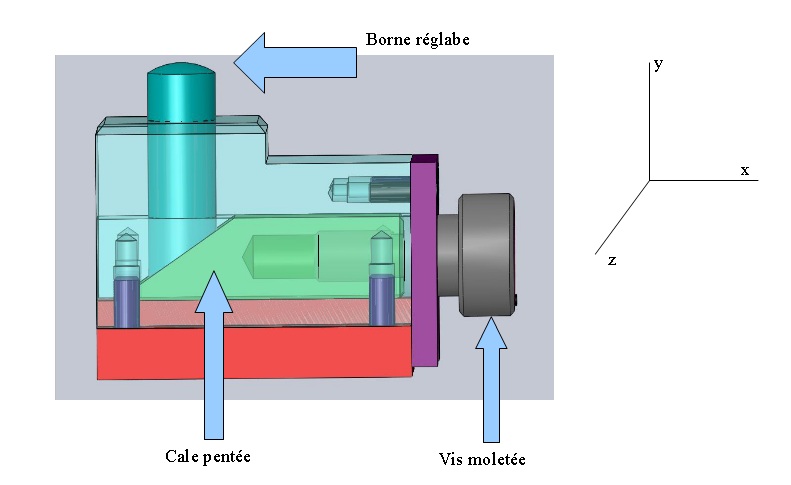
Photographie qui montre les différents capteurs mentionnés dans l’artcile
~Photo LP2I