Compte-rendu de l’étude du dernier axe du robot kuka
– Système choisi
– Robot Kuka KR500-3.
Description du besoin

Il est destiné à mouvoir un ou plusieurs objets ou personnes sur 6 axes différents. Il est utilisé dans les industries pour la fabrication d’objets d’une façon précise et rapide et, aussi dans des attractions pour une utilisation public (La Danse des Robots)
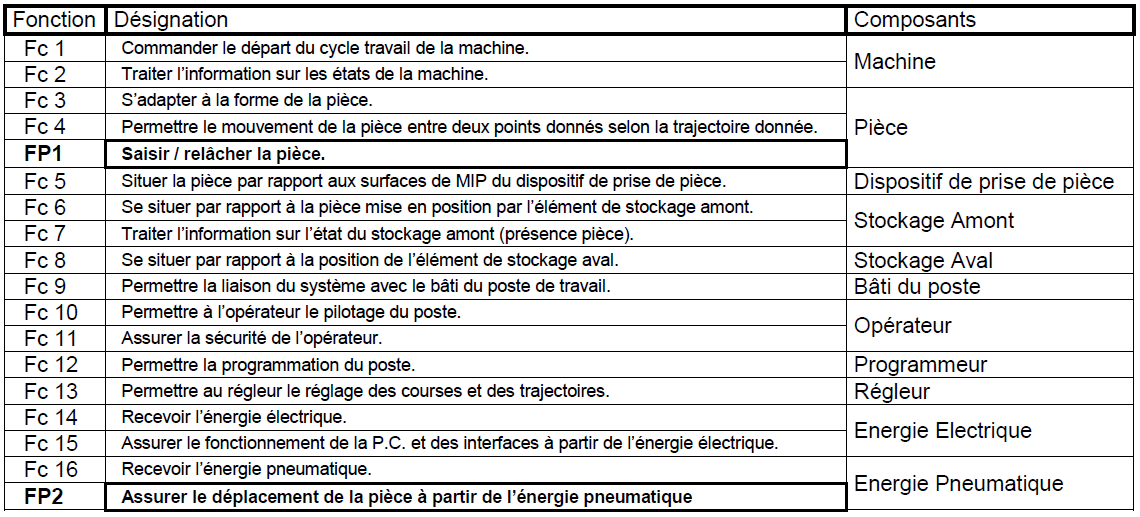
Principales fonctions de service du système et contraintes.
Principales fonctions de services:
– Mouvoir un objet (éventuellement une nacelle prévue pour transporter 2 personnes dans le cas de l’attraction “La Danse des Robots” du Futuroscope) depuis pratiquement n’importe quelle position à quasiment n’importe quelle autre à l’intérieur du rayon d’action du robot (limité tout de même par le poids de l’objet et les hypothétiques obstacles autours de celui-ci).
-Pouvoir programmer les mouvements du robot facilement pour qu’il puisse reproduire des séries d’actions préenregistrées.
-Pouvoir contrôler la célérité des mouvements selon le besoin de l’utilisateur (exemple: Sur une chaîne d’assemblage, selon sa cadence; Pour la Danse des Robots, pour varier les sensations ressenties par l’utilisateur)
-(Essentiellement pour la Danse des Robots ou le travail à la chaîne): Pouvoir synchroniser le robot avec d’autres robots Kuka KR500-3 et les faire travailler de concert.
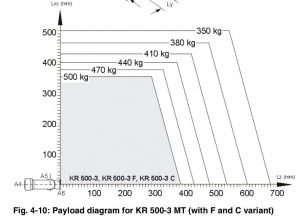
Contraintes du système:
- Doit supporter comme poids maximum de 500 à 350 kilogrammes selon l’extension du bras.
- Ne doit pas mettre en péril la sécurité de son utilisateur en dehors des risques spécifiés
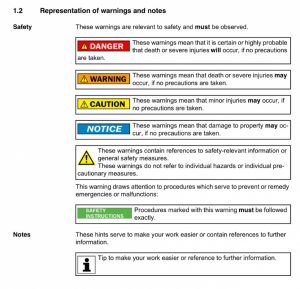
Précautions quand à l’utilisation et à la manipulation du robot Kuka, sous formes de précisions dans la documentation du robot.
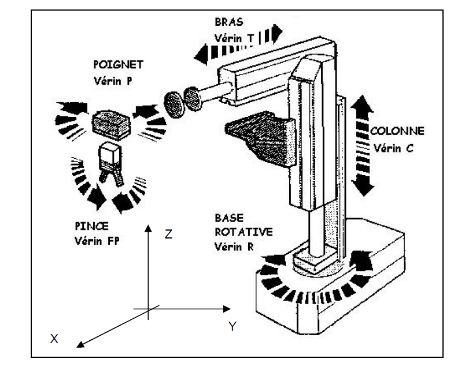
Description du fonctionnement, vu de l’utilisateur :
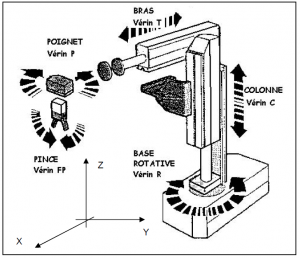
Vu de l’utilisateur, le robot Kuka KR500-3 bouge sur 6 axes différents, selon le programme qu’il suit. Il permet ainsi de déplacer sa tête dans de très nombreuses positions et orientations et ainsi de manipuler des objets (ou la nacelle dans le cas de l’attraction La Danse des Robots) aisément et selon les besoins de son utilisateur.
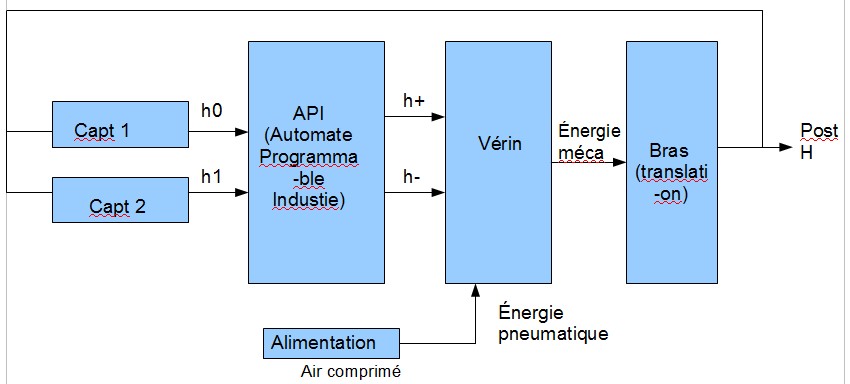
Analyse partielle d’une chaîne d’énergie
- Description d’une chaîne d’énergie
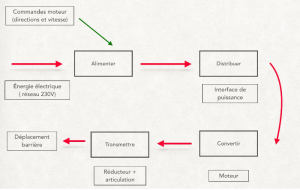
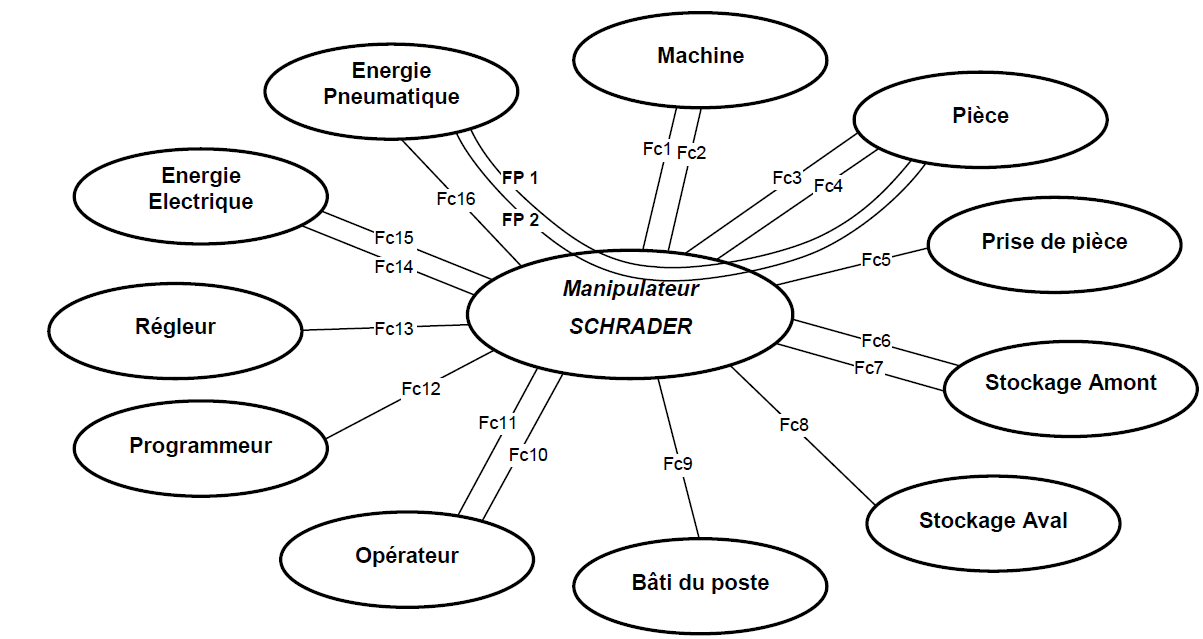
analye fonctionel du robot kuka
- Analyse de solutions techniques
Les solutions techniques permettant la transmission de l’énergie mécanique du moteur jusqu’aux axes malgré la place restreinte et les angles dans la structure du robot sont des systèmes de courroies et de poulies.
Analyse et modélisation d’une fonction cinématique du système
- Choix d’une fonction permettant de transmettre un mouvement
Un moteur électrique actionnant une poulie qui entraîne une courroie dirigée par d’autres poulies jusqu’à entraîner la rotation de l’axe du robot Kuka.
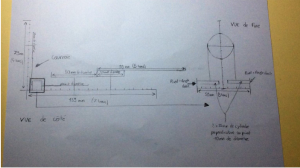
Modélisation, simulation et réalisation d’un dispositif expérimental
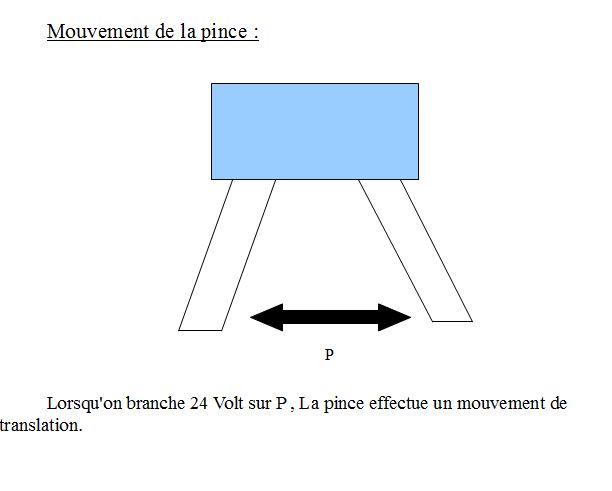
Croquis :
Modélisation avec Onshape :
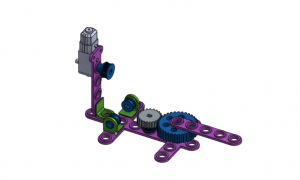
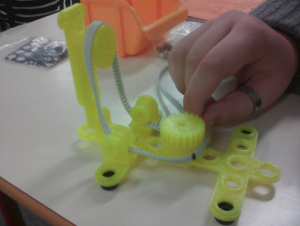
Système imprimé avec une imprimante 3D :