I) Travail demandé
Au cours de ce travail, nous avons été amenés à travailler autour de la problématique suivante : “Comment mettre en œuvre un automate programmable industriel ?”
Pour y répondre, il nous a été demandé de considérer le système suivant :
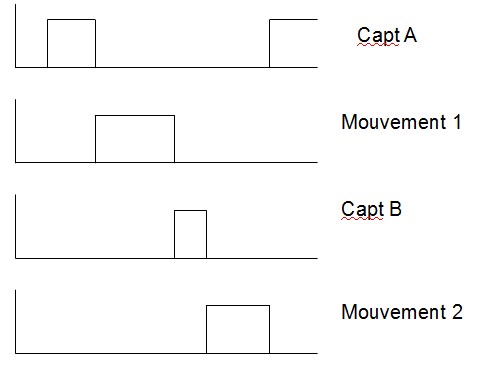
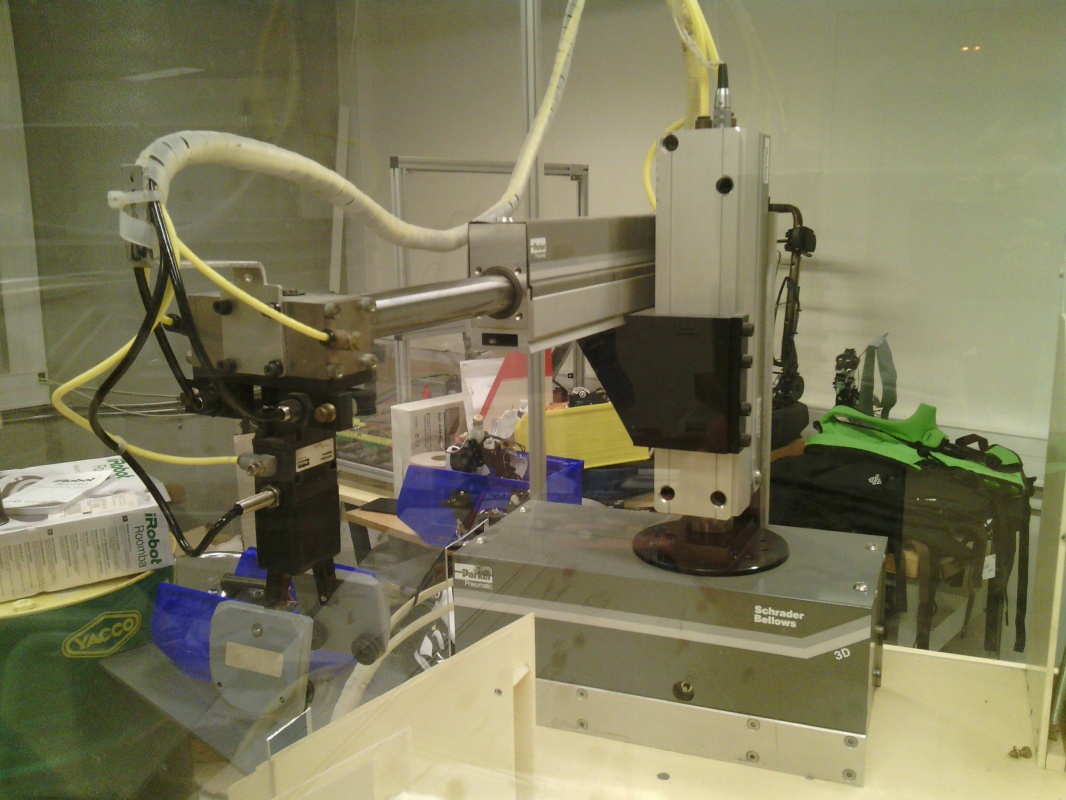
– Un objet se déplace grâce à des actionneurs (ici simulés manuellement pour simplifier) commandés par un automate programmable (en Tout Ou Rien)
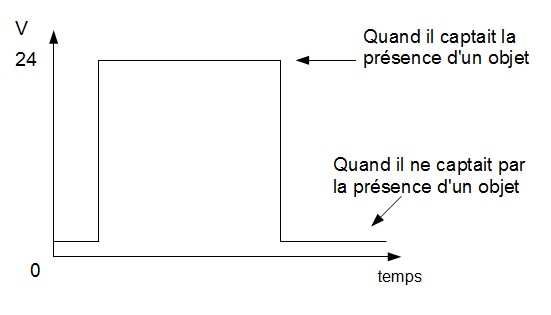
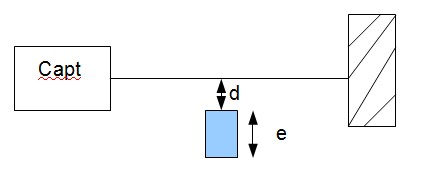
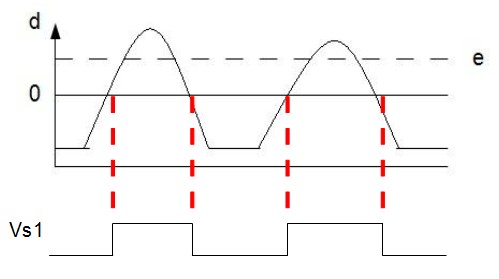
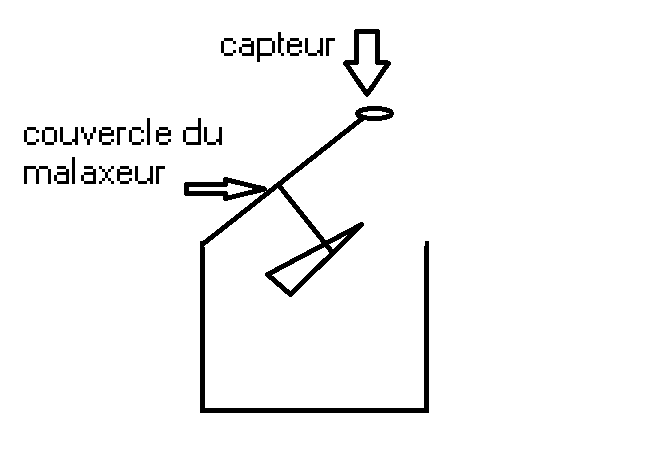
– Des capteurs de position détectent la présence (ou la proximité) de l’objet à différents endroits.
– Un bouton commande le lancement d’un cycle de fonctionnement. On pourra utiliser un bouton présent sur l’interface de l’automate.
Et pour ce système, il nous était demandé d’obtenir le fonctionnement suivant :
“L’objet doit se déplacer automatiquement entre deux positions en effectuant des aller-retours de manière cyclique tant que le bouton dcy (départ cycle) est activé. Si le bouton dcy est désactivé, alors le cycle en cours peut se terminer normalement, mais un nouveau cycle ne commencera que lorsque dcy sera à nouveau activé.”
Pour ce faire, le travail se décomposait en trois étapes : la création d’un Grafcet simple pour obtenir le fonctionnement souhaité à l’aide d’Automgen, la simulation du fonctionnement de ce Grafcet en mode PC avec Automgen, et enfin la mise en oeuvre avec l’API et les capteurs.
II) Travail réalisé
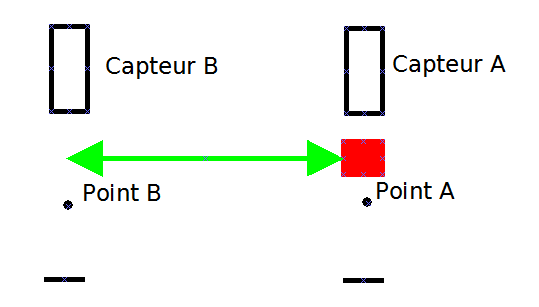
Nous avons commencé par nommer les deux positions auxquelles doit être amené l’objet A et B, avant de rédiger le cahier des charges à partir de la consigne :
– L’objet doit se déplacer en faisant des aller-retours entre un point A et un point B
– Ce déplacement doit être cyclique et automatique
– Le déplacement ne doit pouvoir se faire que lorsqu’un bouton dcy est activé
– Si le bouton dcy se voit désactivé en cours de cycle, celui-ci doit pouvoir se terminer normalement, mais un nouveau cycle ne doit pouvoir se déclencher que si dcy se voit à nouveau activé.
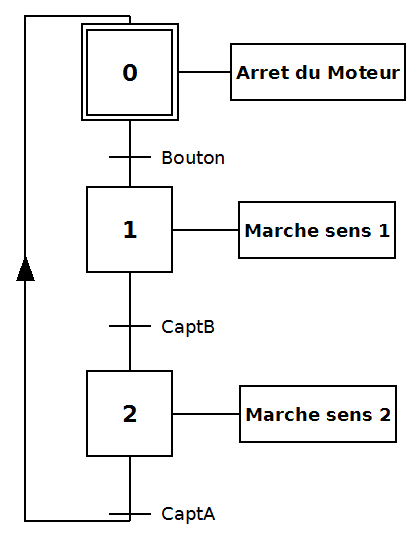
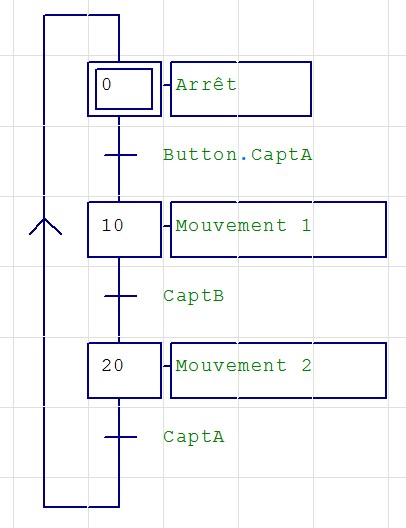
Afin répondre à la demande, nous avons donc créé sur Automgen le Grafcet suivant :
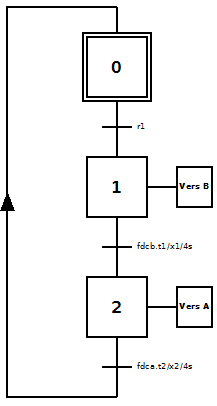
r1 : bouton dcy
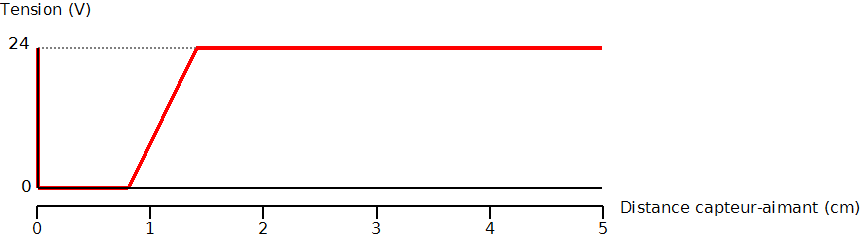
fdcb : capteur fin de course au point B
fdca : capteur fin de course au point A
Source : LP2I
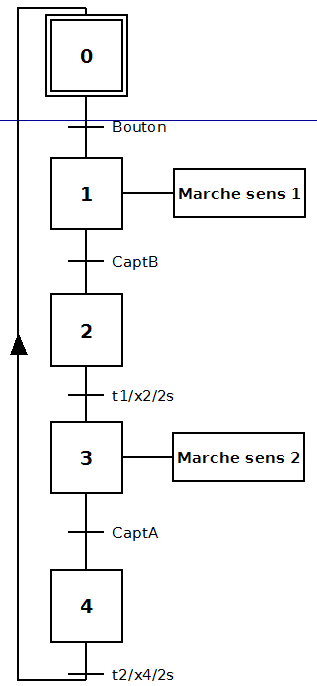
Nous avons ajouté une temporisation de 4 secondes entre les actions afin de pouvoir observer plus aisément le déroulement du grafcet au cours des différents test.
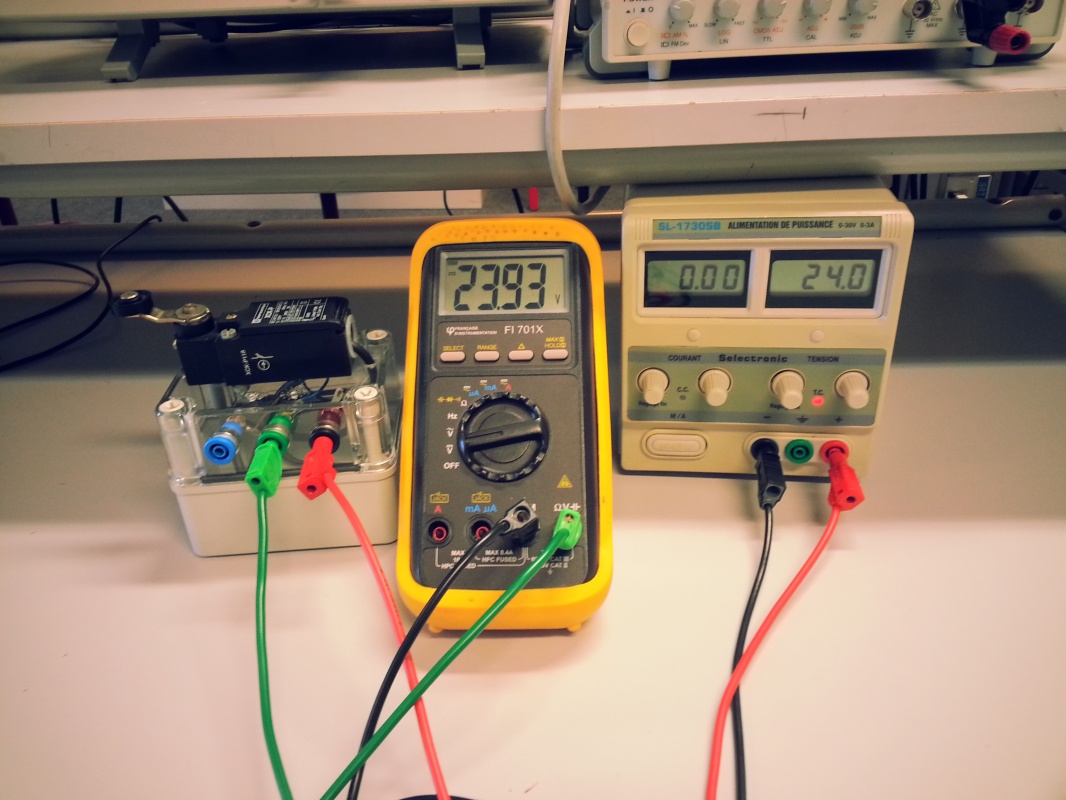
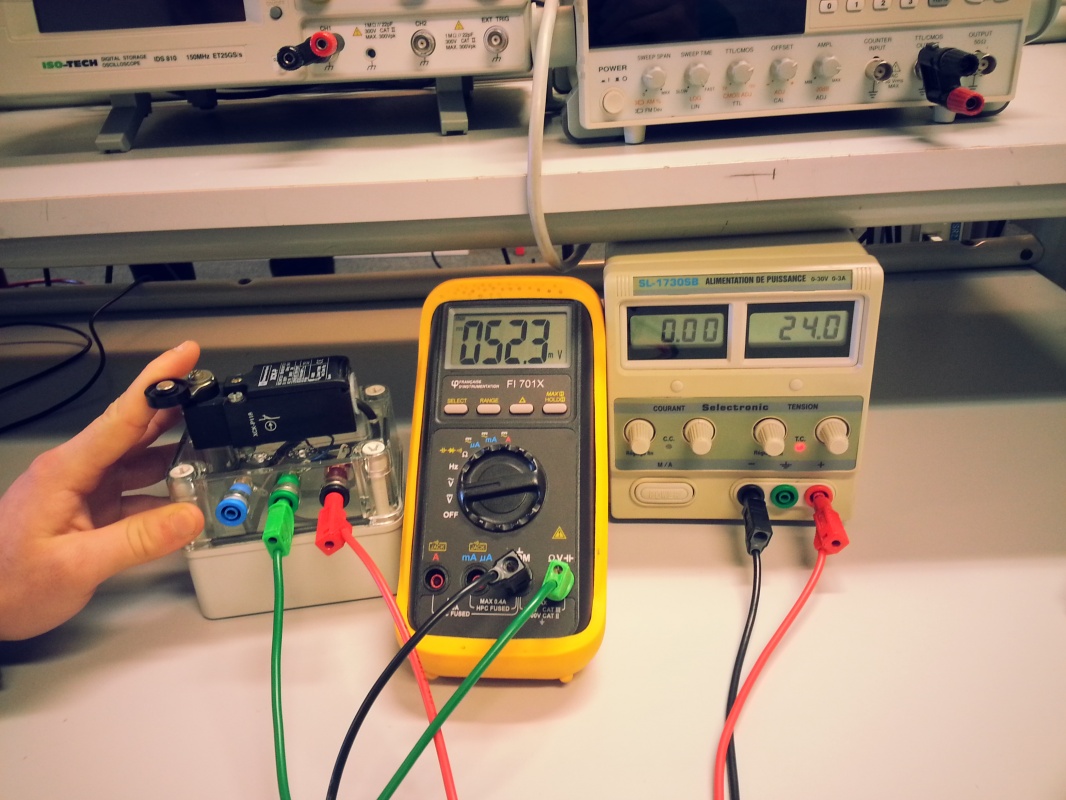
Conformément à la consigne, nous avons ensuite réalisé un test en mode PC afin de vérifier le fonctionnement de notre grafcet. Celui-ci s’étant avéré fructueux, nous somme donc passé à la mise en œuvre de l’API et des capteurs
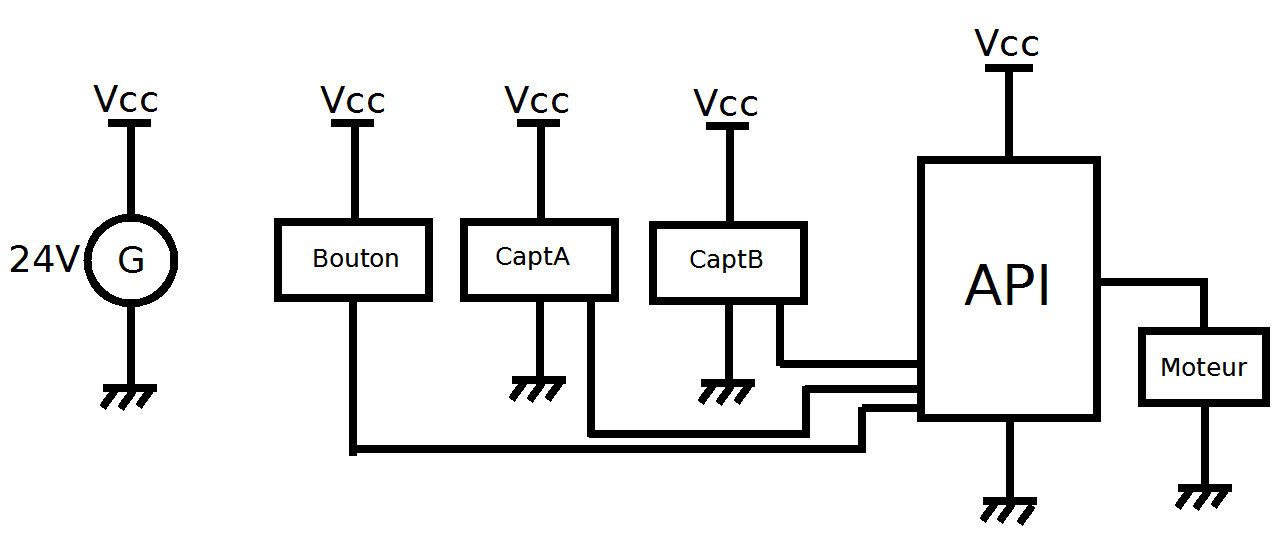
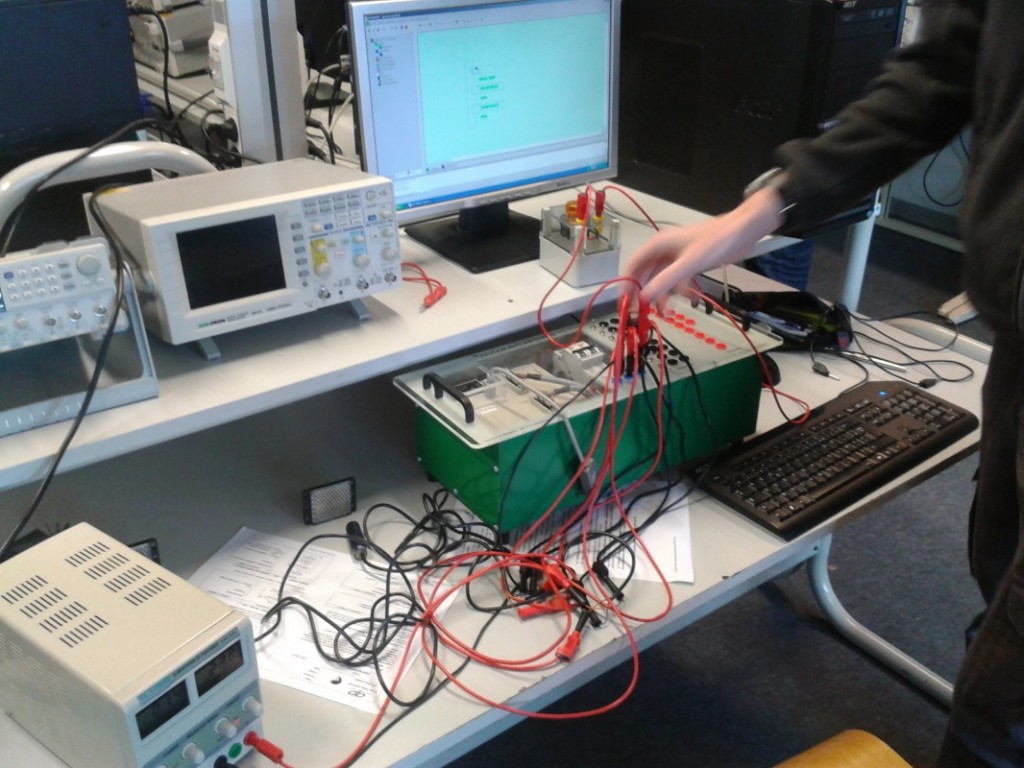
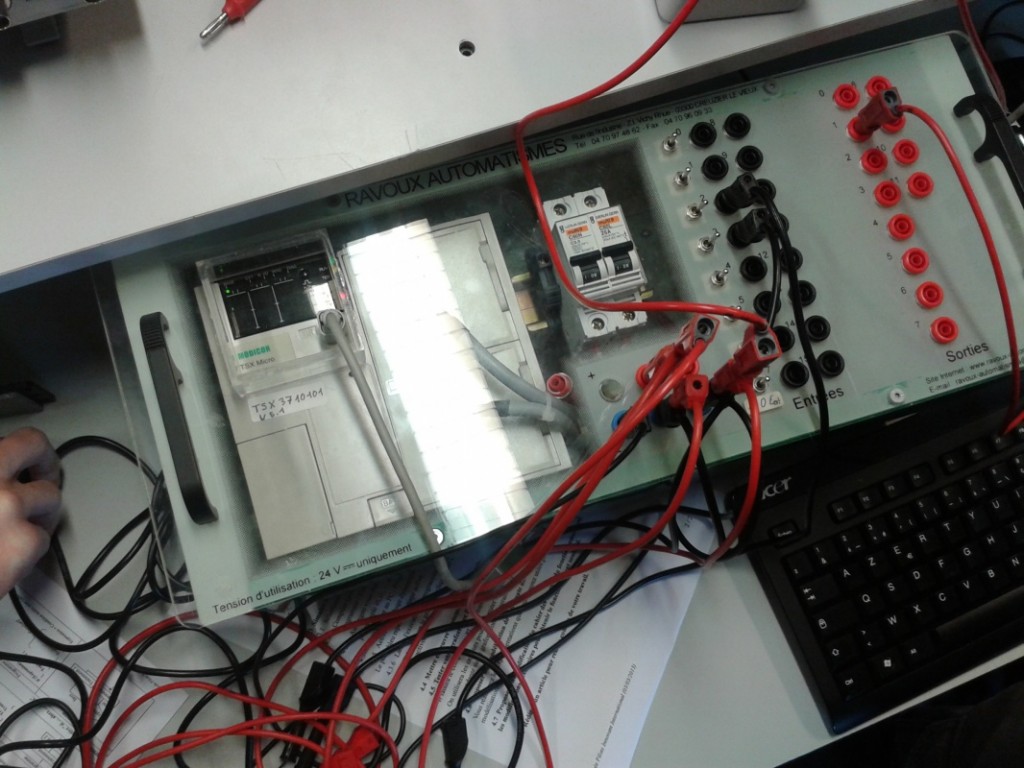
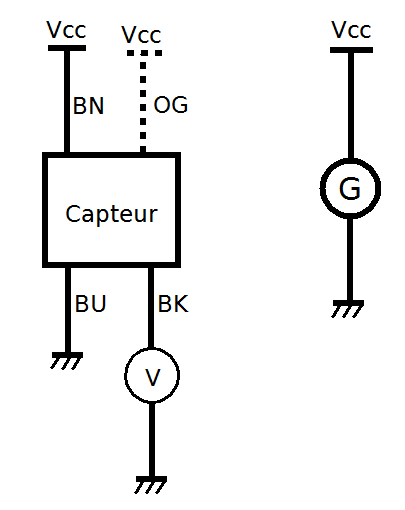
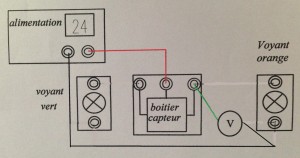
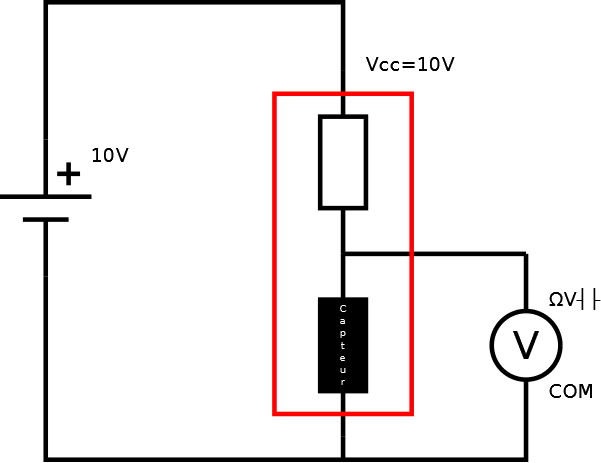
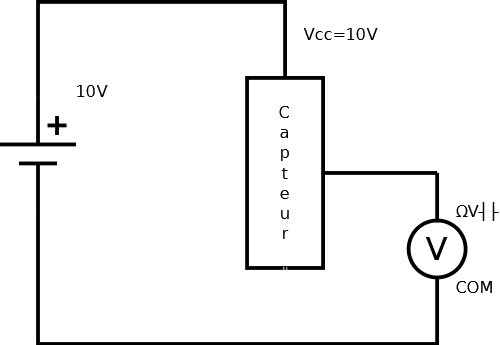
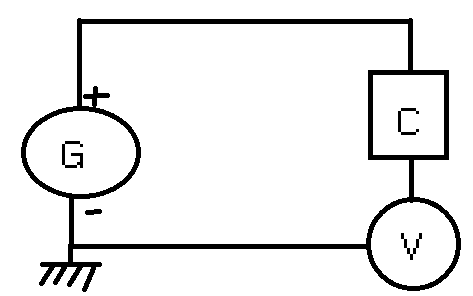
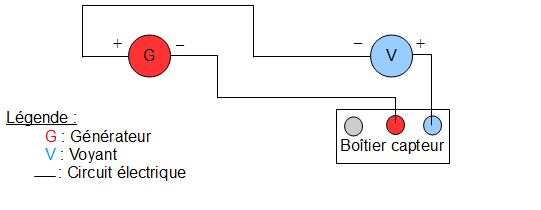
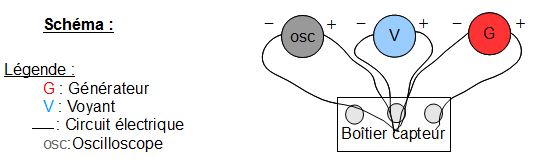
Nous avons réalisé le câblage suivant :
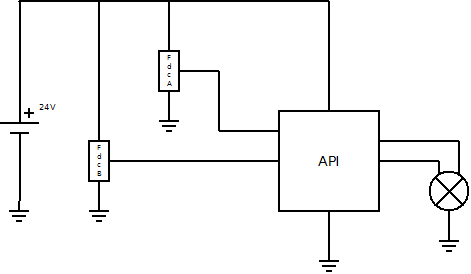
Source : LP2I
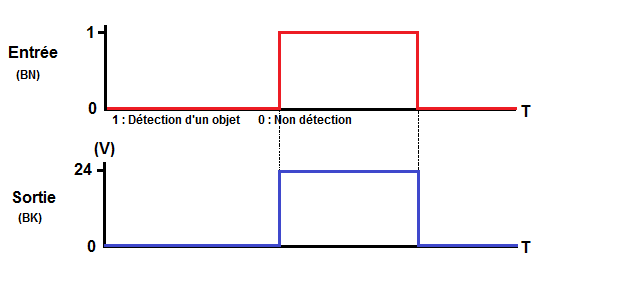
Les actionneurs ont ici été remplacés par un voyant lumineux afin de voir les signaux de sortie de l’API, et dcy est un bouton présent sur l’interface de l’automate.
En actionnant les capteurs et en utilisant le bouton dcy, nous avons donc pu confirmer que notre Grafcet pouvait réaliser le fonctionnement souhaité avec le système proposé.