Problématique
Quelles sont les solutions retenues par le constructeurs pour que le système soit compétitif sur le plan de son efficacité énergétique ? Ces solutions vous paraissent-elles optimums quand à l’impact de ce système sur l’environnement ?
Travail demandé
Apporter des éléments de réponse à la problématique en étudiant le cas d’un système réel, choisi parmi ceux proposés. Travailler en équipes de 2 à 4 élèves pour chaque système.
Système proposés
Voiture électrique Mia
Hélicoptère AR Drone
Alimentation solaire et éclairage
Système audio (alim+ampli+HP)
Système d’arrosage automatique Gardena (pompe, électrovannes, programmateurs).
Télévision à écran plat Robot aspirateur _________________________________________________________________________
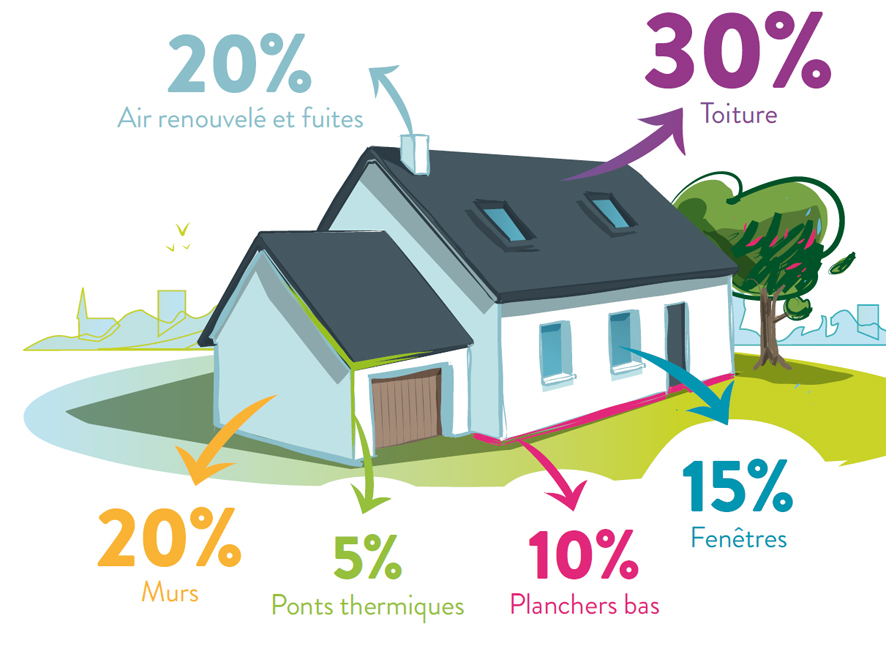
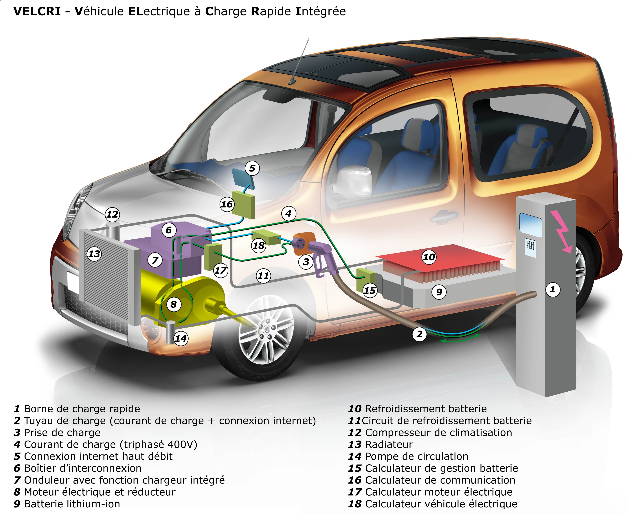
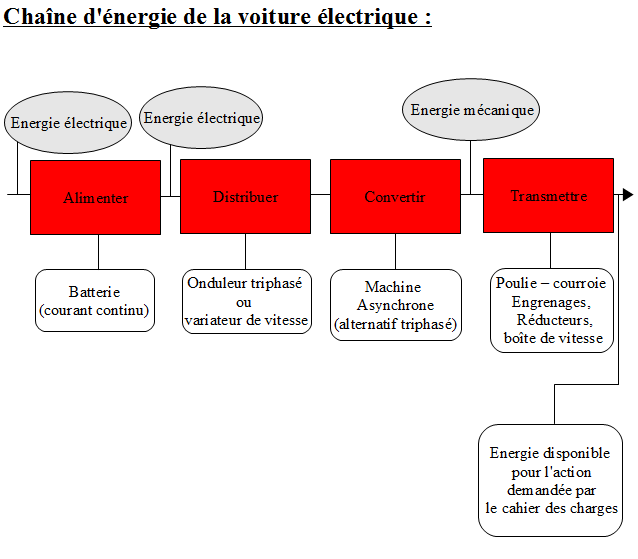
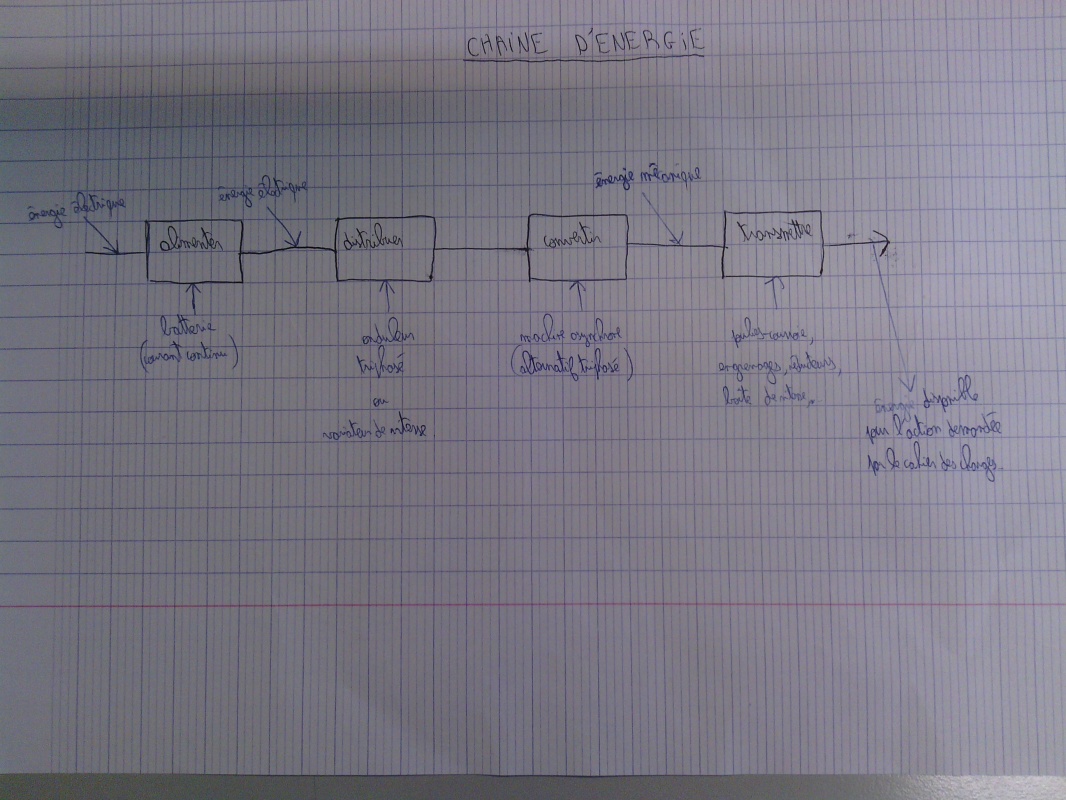
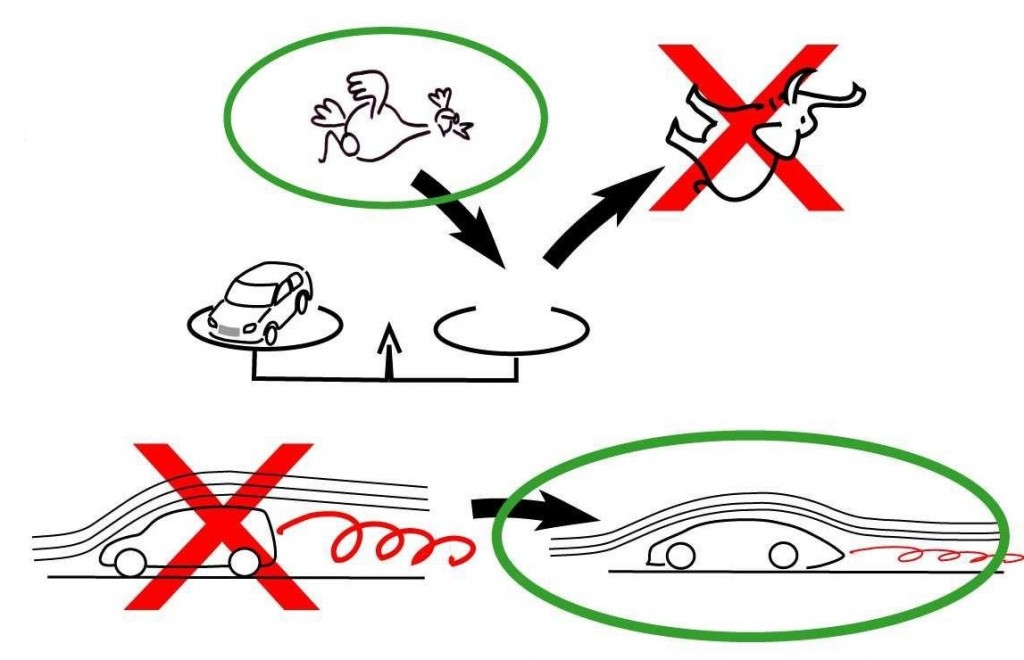
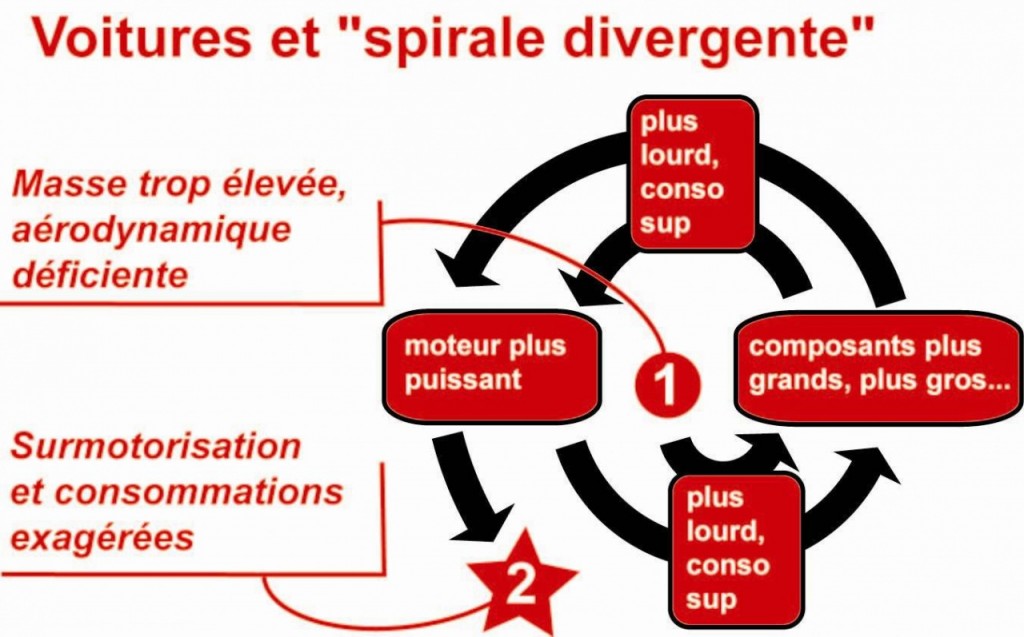
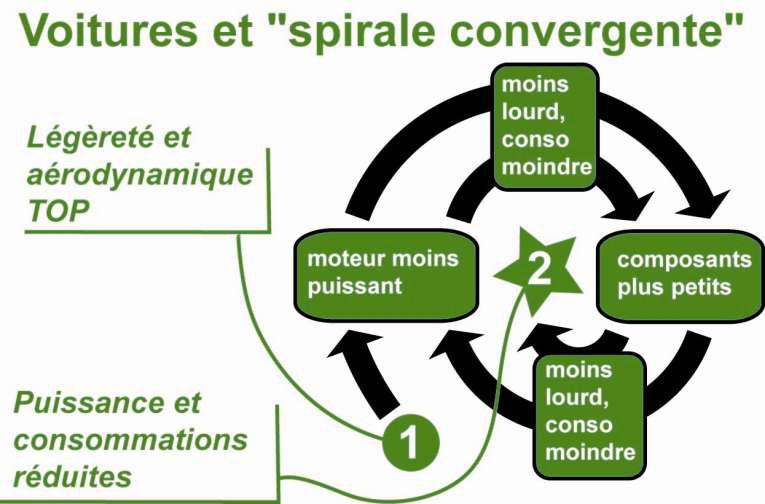
Moi et mon groupe, nous avons choisi de prendre le système de la voiture électrique Mia. Avec l’aide des documents que nous a mis à disposition notre professeur, nous avons pu comprendre et voir les composants de cette voiture électrique. Tout d’abord, nous avons compris que le but des constructeurs maintenant était de réduire les consommations d’énergies de leur véhicule. Pour cela ils se sont aider des nouvelles technologies. Mais ils rencontrent un problème majeur : les usagers demandent de plus en plus de confort et de technologies embarquées, ce qui engendre une sur-consommation. En effet, l’embarquement de ces nouvelles technologies de confort génère un sur-poids qui est l’ennemis de la baisse de la consommation d’énergie. La question du poids peut être résolu en se débarrassant de gadgets ou de systèmes qui ne sont pas toujours utiles et primordiaux (climatisation, vitres électriques, et autres accessoires).
Source LP2I
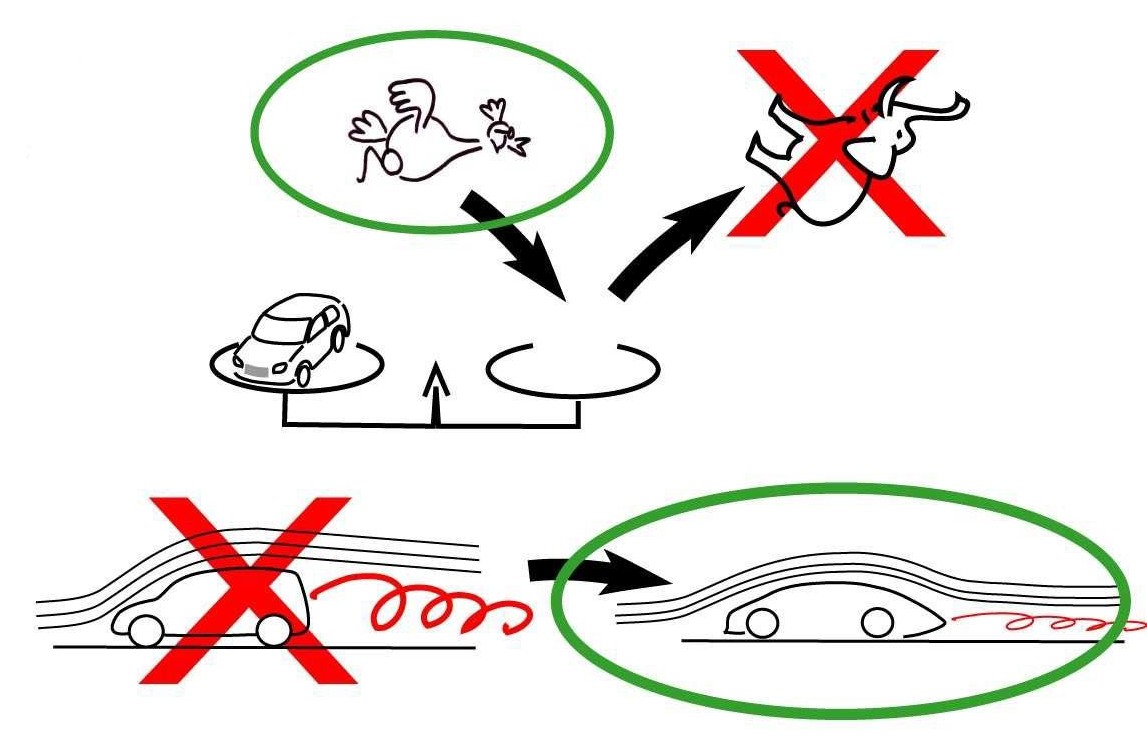
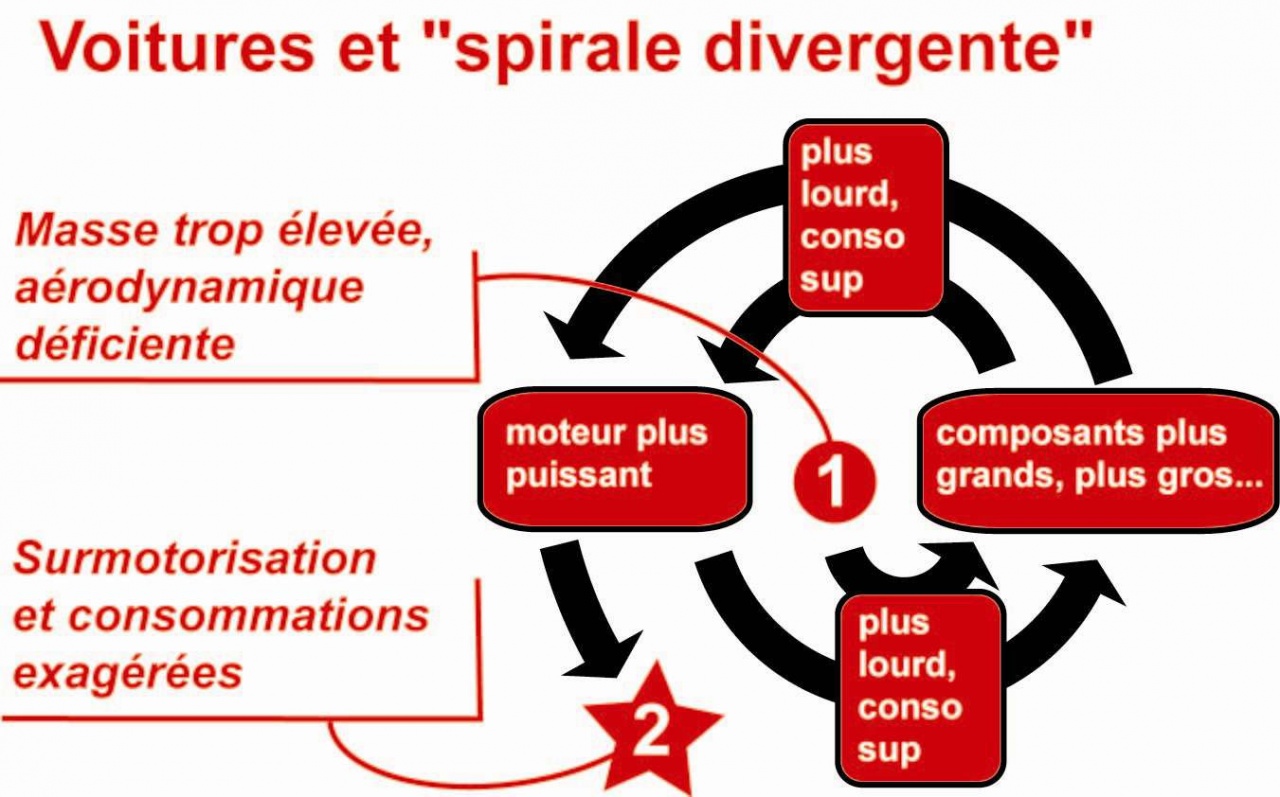
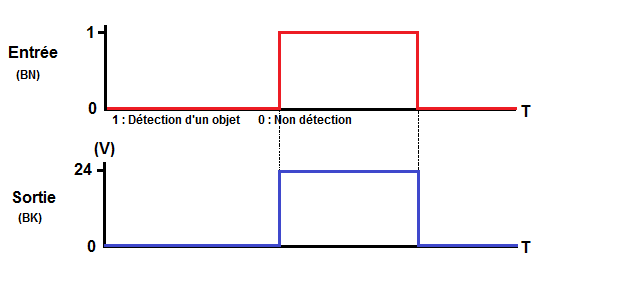
Cette réalité peut être caricaturée par plusieurs images.

Source d’un document PDF donné par notre professeur.
On peut modéliser l’interaction entre l’économie apportée (dû à la masse de la voiture, etc…) et l’énergie nécessaire au déplacement de la voiture. Nous pouvons calculer l’énergie qui est consommée par cette formule :
Ec = Eu / rv

Source tirée d’un document PDF donné par notre professeur.
Eu = énergie utile nécessaire
Ec = énergie consommée
rv = rendement de la voiture
C’est avec ce type de calcul que les constructeurs essayent de faire des voitures qui polluent le moins possible pour avoir un impact environnemental faible. Nous avons ensuite compris que les constructeurs recherchaient l’énergie utile. L’énergie utile est une analyse qui permet d’identifier les causes qui entraînent une consommation d’énergie. Les constructeurs peuvent ensuite modifier les causes de ces consommations d’énergie. Mais cette énergie utile est difficile à trouver, car elle dépend de beaucoup de facteurs et change en fonction des voitures : les accélérations, la vitesse… En plus de cela, elle varie en fonction de l’usager et de la route. L’énergie utile est calculée de la façon suivante:
Eu= Eua + Eur + Eug + Eum
Avec : Eua = énergie utile arérodynamique (dépend de la surface et du coefficient d’efficacité aérodynamique)
Eua = énergie utile de roulement (dépend de la masse et du coefficient de résistance au roulement)
Eug = Energie utile accélérateur (dépend de la masse)
Eum = énergie utile montée (dépend du cycle urbain)
Il faut savoir que le rendement d’une voiture dépend également du type d’énergie consommé. Si on a affaire à un moteur thermique le rendement est d’environ 15.5 % et si le moteur est électrique le rendement est de 72 %. Le rendement d’un véhicule électrique est très supérieur au moteur thermique Le bilan CO2 pour de l’essence, du diesel et du GPL : environ 18 kg de CO2 au 100 km. Pour les véhicules électriques, on est au alentour de 8.5 kg de CO2 au 100 kg. On préserve donc plus la planète en roulant avec des voitures électriques. Avec un moteur électrique on peut récupérer l’énergie cinétique lors des phases de ralentissement ce qui permet d’améliorer le rendement. Pour l’instant nous avons vu que l’aspect mécanique et technique était une garantie sur l’impact environnemental des voitures.
Mais d’autres facteurs doivent être pris en compte comme : l’éco-design. L’éco-design est réfléchi de façon à s’attaquer directement aux causes premières de la consommation d’énergie : c’est à dire de réduire les masses et les traînées aérodynamiques (en travaillant sur les formes du véhicule de manière à diminuer la résistance à la pénétration dans l’air..)
Source tirée d’un document PDF donné par notre professeur
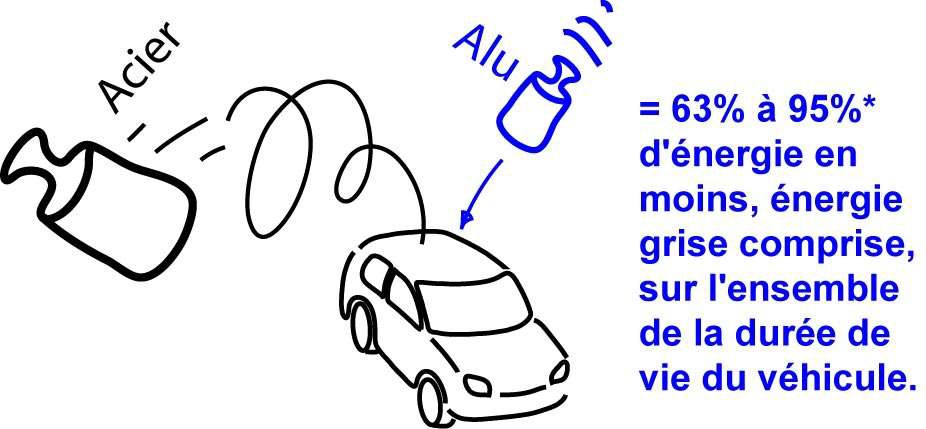
Une recherche a été faîte sur la conception de la matière pour la voiture. Les voitures en ce moment sont principalement faîtes avec de l’acier, mais les constructeurs ont découvert que l’alu était beaucoup plus léger tout en restant très résistant.
Source tirée d’un document PDF donné par notre professeur
Les designers et les constructeurs de voiture ont donc conclu que pour réduire les masses et améliorer l’aérodynamisme, il faut agir sur les formes et la matière des voitures. Néanmoins, ils continuent à dire qu’il faut toujours privilégier le vélo ou la marche à pied pour des petits déplacements.
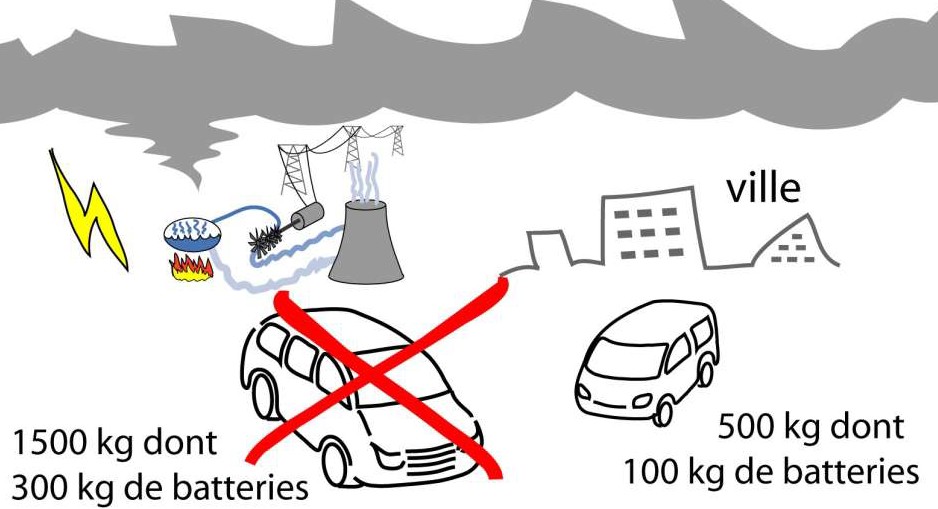
Une autre recherche a été faîte sur les voitures électriques, avec des questions comme : Est-ce que la voiture électrique est vraiment bien pour réduire les émissions de CO2 ? En ville les phases d’accélération (très gourmande en énergie) sont fréquentes ainsi que les phases de freinage (dissipation de l’énergie sous forme de chaleur). Avoir un véhicule électrique avec un grand rendement à tout son sens : la perte d’énergie durant les phases d’accélération est nettement plus faible que dans le cas d’un moteur thermique et durant les phases de freinages la récupération de l’énergie est possible et permet de recharger les batteries. Par contre, les voitures électriques ont une faible autonomie ce qui limite les déplacements en usage extra-urbains.
Source tirée d’un document PDF donné par notre professeur
Les voitures hybrides (thermique-électrique) semble être le meilleur compromis : durant les phases d’accélérations très énergivore on utilise le moteur électrique, en vitesse stabilisée on utilise le moteur thermique, durant les phases de ralentissement on récupère une partie de l’énergie pour recharger les batteries.
Après l’éco-design, vient l’éco-conception. L’éco-conception est la prise en compte, dès la conception de la voiture, de l’impact environnemental. C’est une démarche qui se caractérise par une approche globale : l’impact environnemental est évalué lors de toutes les phases de la vie du produit (depuis l’extraction des matières premières à la fin de la vie de la voiture = son recyclage). Il faut chercher d’autres matériaux qui ne sont pas utilisés en ce moment, mais le remplacement d’un matériau nécessite de connaître toutes ses caractéristiques : la nature du matériau, le lieu d’extraction, l’origine géographique (en terme de distance), les transformations nécessaires, le stockage, sa résistance (notamment la résistance à la fatigue) et enfin la tenue aux agressions chimiques et climatologiques, mais aussi son recyclage.
Source tirée d’un document PDF donné par notre professeur
Source tirée d’un document PDF donné par notre professeur
Ces deux images nous permettent de revenir tout le temps sur le même point : pour avoir une voiture avec peu d’émission de CO2 il faut qu’elle soit légère avec des composants plus petits.
CONCERNANT LA VOITURE MIA
Nous pouvons travaillé sur la Mia car c’est une voiture qui a été offerte par la région. Elle est produite à Heuliez (ville de la région). Elle existe en version 3 ou 4 places.
Concernant la Mia 3 places : Moteur électrique : 18 kW (24,5 ch) Vitesse Max : 110 km/h Batterie : Lithium Phosphate de fer de 8 kWh (autonomie 80 km) ou 12 kWh (autonomie 130 km). Temps de recharge : 3h sur 230V 16A en version 12 kWh (2h30 version 8 kWh). Masse à vide : 750 kg Longueur/Largeur/Hauteur : 2,87 m x 1,84 m x 1,55m Volume du Coffre : 200 litres.

Source LP2I
Concernant la Mia 4 places : C’est semblablement la même chose à deux exceptions prêt : Masse à vide 784 kg Longueur/Largeur/Hauteur: 3,19m x 1,64m x 1,55m

Source LP2I
Pour résumer :
– petite voiture => limitation du poids
– voiture étroite => améliore la pénétration dans l’air => aérodynamisme
– pas de climatisation, pas de lèves vitres électroniques, pas de radio, pas d’ordinateur de bord => pas de consommation énergétique superflus => amélioration du poids
Source LP2I
EN RÉPONSE A LA PROBLÉMATIQUE
Les solutions retenues :
– Améliorer le rendement des moteurs. Ec soit proche de l’énergie Eu.
Ec = Ev / rv
– Abaisser le poids des véhicules = éco-conception
– Choisir des matériaux permettant d’avoir un impact minimum pour l’environnement.
De l’extraction ————————————————– Au recyclage
– Améliorer l’aérodynamisme des véhicules. – Recherche du meilleur compromis entre les besoins et la puissance des véhicules.
Après toutes nos recherches sur les voitures en générale, nous nous sommes interessés aux composants de la voiture MIA.
Pour pouvoir déterminé les matériaux présents sur la voiture, nous avons prit un émant et nous l’avons testé sur la voiture. Si l’émant resté collé a la voiture, cela voulait dire que c’était de l’acier et dans le cas contraire c’était donc soit de l’alu ou du plastique.

Source LP2I
Nous avons donc pu en conclure que :
– la carosserie est composé entièrement de plastique.
– le chassis et les rails pour ouvrir les portes latérals sont en asier.
– le moteur est lui en alu.
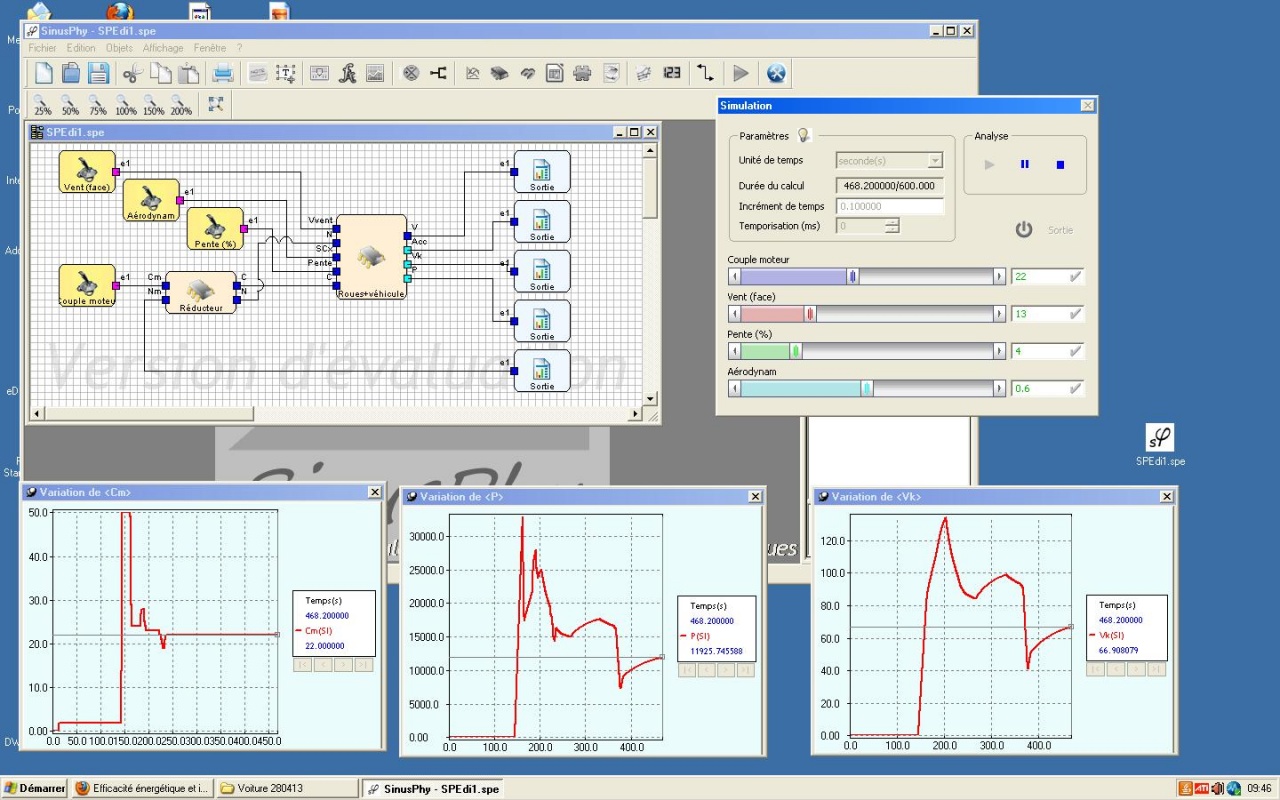
Nous nous sommes ensuite intéresser a voiture en général. Nous avons utilisé le logiciel SinusPhy, qui nous permet de voir la variation de la puissance et du couple moteur en fonction du vent, de la vitesse de la voiture, pente et l’aérodynamisme.
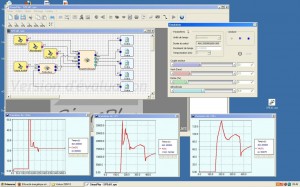
Source tirée du logiciel SinusPhy
C’est grâce a cette analyse que nous nous rendons compte que la puissance de la voiture dépend bien du vent, si on est dans une pente et l’aérodynamisme joue à partir d’une certaine vitesse : a faible allure l’aérodynamisme ne joue pas sur la puissance.