Problématique: Comment permettre un fonctionnement automatique tout en assurant un comportement sûr pour le matériel et les personnes ?
| Entrées |
| Avance du robot |
| Recule |
| Gauche |
| Droite |
| Vitesse |
| stop |
| Sorties |
| Moteur droit avance |
| Moteur droit recule |
| Moteur gauche avance |
| Moteur gauche recule |
Le robot tondeur possède deux vitesses. Nous pouvons choisir celui désiré en cliquant sur un bouton de la console. Ces vitesses ont des moyennes d’à peu près 22 et 37 tours/min (analysé sur un oscilloscope).
Manuellement (seul mode possible dans notre cas) pour faire avancer le robot nous appuyons sur la flèche qui pointe vers le haut. Pour faire arrêter les roues, il suffit soit d’enlever son doigt, soit d’appuyer et de relâcher le bouton stop.


Le moteur reçoit des signaux logiques, car elles sont les plus simples : il est soit allumé soit éteint, soit en marche avant soit en marche arrière.
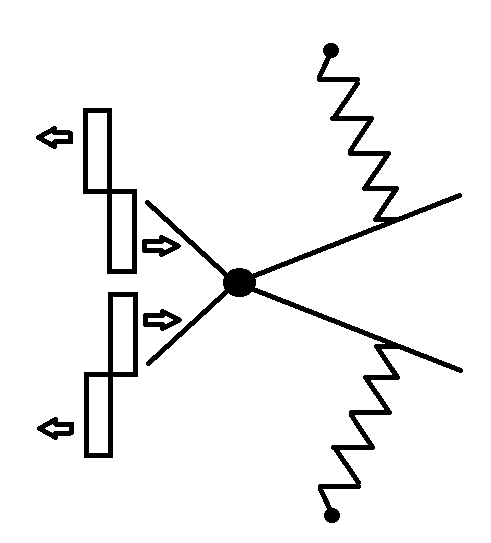
Dans le tableau ci-dessous, nous pouvons observer comment les deux moteurs font tourner le robot.
| Avance | Recule | Gauche | Droite | |
| Moteur 1 | 1 | 2 | 2 | 1 |
| Moteur 2 | 1 | 2 | 1 | 2 |
1=On marche avant, 2=On marche arrière.
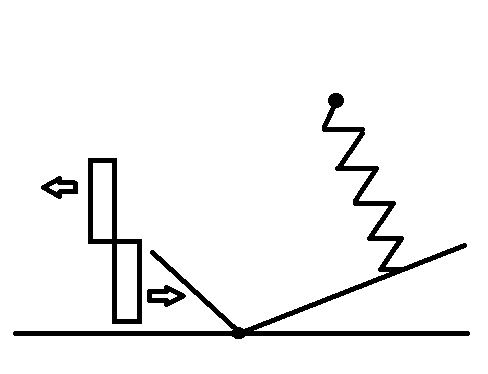
Nous allons analyser de plus près comment le robot fait pour tourner à droite.
Nous avons une entrée de l’utilisateur dans ce cas-ci qui indique au robot que nous voulons tourner à droite, une autre de la part de la batterie au plomb pour alimenter les moteurs. Ensuite nous avons le moteur de gauche qui avance et le moteur de droite qui recule, ce qui provoque en sortie le mouvement vers la droite.
Nous avons aussi travaillé sur une table de vérité :
| Avance | Recule | Gauche | Droite | Stop | Moteur droit avance | Moteur droit recule | Moteur gauche avance | Moteur gauche recule | État du robot |
| 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | Avance |
| 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | Recule |
| 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | Gauche |
| 0 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | Droite |
| 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | Arrêté |
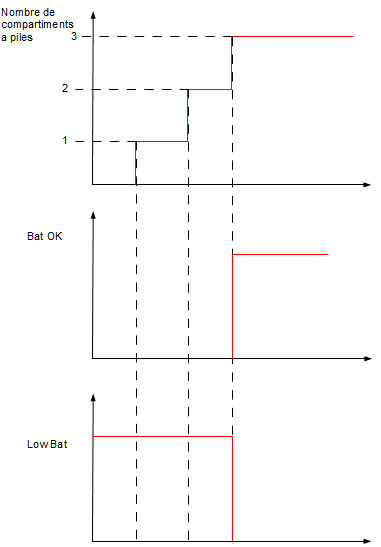
Un de mes partenaires a décrit les risques potentiels du système (lien), un autre a réalisé un chronogramme analysant le moteur (lien) et le dernier a décrit le protocole expérimental (lien).
Sources :
Cours de Si, site expliquant le robot tondeur (lien)



 Exemple de borne à Hydrogène Source :
Exemple de borne à Hydrogène Source : FCX Clarity de chez Honda Source :
FCX Clarity de chez Honda Source :