Lors de cette étude de cas nous avons choisi le thème des drones:
Nous allons étudié les avantages, les inconvénients et les solutions techniques pour prendre des photos aériennes avec un drone.
Le drone est un Aéronef dépourvu de pilote. Il se commande à distance, à vue, ou au moyen d’une caméra embarquée. Plus stable que les hélicoptères, plus maniable que les avions, grâce à ses multiples hélices, il se distingue pour le vol stationnaire et donc pour les prises de vues aériennes photos et vidéos. En revanche, il possède un faible autonomie ce qui limite très rapidement son utilisation, et sa petite envergure fais du drone un objet très sensible au vent. En effet, si le vent excède une vitesse de 40 km/h alors le drone vire en fonction de la direction du vent. Outre les domaines militaires et professionnels ( surveillance des zones inondées,des lignes haute tension, des manifestations , thermographie aérienne), Le drone est un objet dont le prix est plutôt élevé mais de plus en plus de particuliers en font l’acquisition.
Voici et un tableau citant plusieurs avantages et inconvénients du drone par rapport aux autres véhicules volants comme l’avion, l’hélicoptère ou l’ULM:
| DRONE | AUTRE VÉHICULE VOLANT |
| maniabilité a environ 30 cm de marge | maniabilité a plusieurs |
| Vol stationnaire possible | Vol stationnaire seulement pour l’hélicoptère |
| peut voler partout et proche des maison sauf au dessus des foules | hauteur minimum de vol : 150m |
| Nous avons besoin au maximum du permis théorique ULM | Besoin du permis avion ou hélicoptère |
| très sensible au vent ( supérieur a 40km/h ) | sensible seulement au très fort vent |
| Très peu d’autonomie | Très grande autonomie |
| Prix pas très élevé pour un professionnel | Prix vraiment très élevé |

Photo du drone utilisé au LP2I. Un quadricoptère parrot A.R drone Source: LP2I
Le drone a été conçu comme un objet maniable, léger et stable auquel on peut fixer un appareil de prise de vues et dont on peut manier facilement ce dernier.
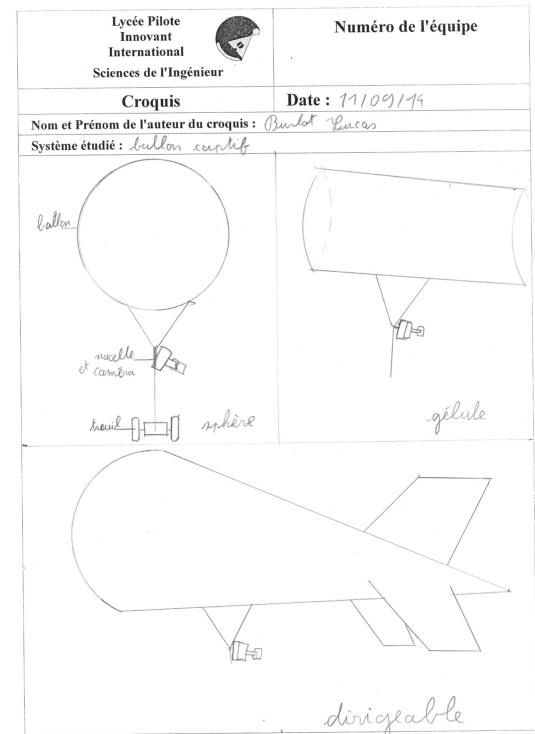
Les solutions techniques:
Afin de déplacer le drone les ingénieurs on du mettre en place une télécommande infrarouge qui permet de déplacer le drone et d’effectuer des prise de vus a plusieurs mètres de hauteur. Ce système fonctionne grâce a une télécommande qui envoie les informations sous forme d’infrarouge que le drone reçoit et exécute grâce a un récepteur infrarouge.
Le drone possèdent un moteur électrique qui est donc non polluant et non bruyant. il est fabriqué a partir de tôle en alliage d’aluminium de 3mm d’épaisseur, avec du plastique et du polystyrène.
La pratique:
Le drone du Lycée ( un quadricoptère A.R drone Parrot®) possède un point d’accès wi-fi, étant donné que chaque élève du lycée dispose d’une tablette, nous avons pus diriger le drone via wi-fi a partir de nos tablettes.

Matthieu B. faisant voler le drone du lycée Source: LP2I

L’image d’une thermographie réalisé grâce à un drone Source: http://www.flyingeye.fr/case/thermographie-de-batiments-par-drone/

Un drone octocoptère thermographique. source: http://www.studiofly.fr/
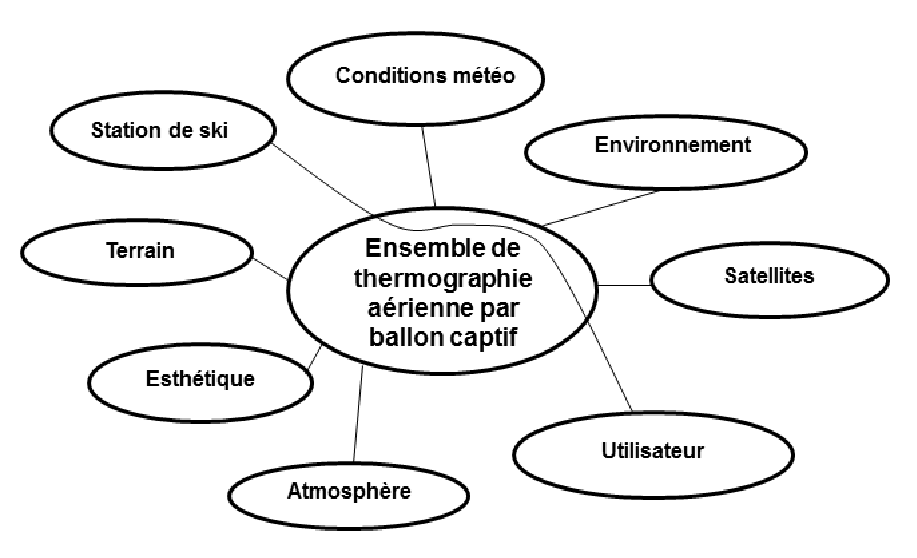
Nous cherchons à décrire le ou les besoins auquel répond le système choisi.
Description d’une solution technique:
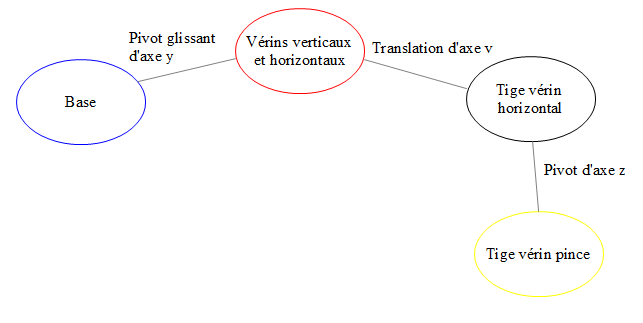
La nacelle gyrostabilité est la solution technique retenu afin de répondre à la fonction technique « orienter l’appareil de prise de vue et le stabiliser en fonction des mouvements du multicoptère ». Cette nacelle doit s’adapter aux dimensions de l’hélicoptère, être suffisament légère pour le multicoptère et se fixer à celui-ci. Elle permet de maintenir la caméra horizontale lors du roulis et du tangage de l’appareil rendant l’image plus stable.
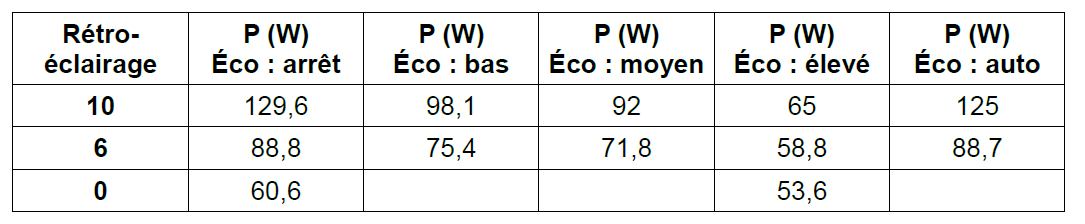
Exemple de solution technique réduisant l’impact environnementale :
Le drone a adapté plusieurs batteries électriques afin de répondre à l’impact environnemental qui est quasi négligeables grâce cette solution technique. Ainsi, le drone pollue beaucoup moins au niveau énergétique et au niveau sonore qu’un moteur thermique.

Le drone a trois axes de rotations source http://aerololo.free.fr/
Le drone peut s’élever dans le ciel puis redescendre pour atterrir, enfin le drone une fois élever dans le ciel, peut se déplacer vers l’avant, l’arrière, la gauche ou la droite. Ces mouvements sont possible car le drone est capable de gérer individuellement la vitesse de rotations de ses hélices afin de lui permettre ces différents mouvements.
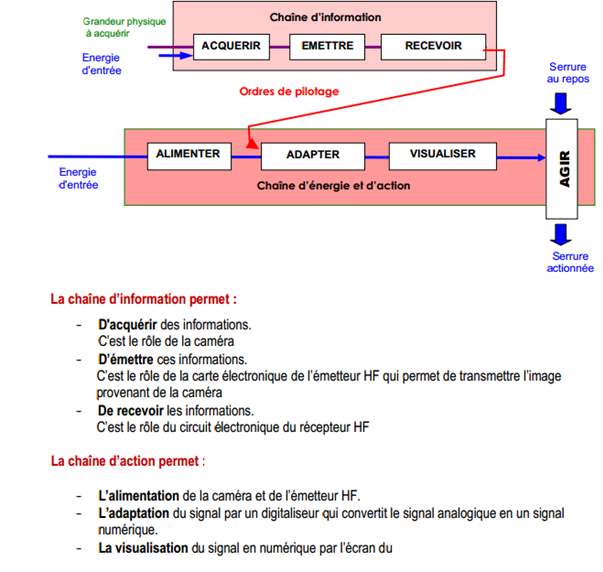
Les différents flux d’informations sont:
Le flux d’information de la camera de du drone a un espaces de stockage
Le flux d’information allant de l’appareil contrôlant le drone (Tablette/Smartphone/Télécommande) au recepteur du drone.
Du récepteur du drone au moteur du drone
Le flux d’information allant du moteur au différentes hélices afin de contrôler la rotation de chaque hélices pour pouvoir contrôler la direction du drone
Les différents flux mécanique:
– Le flux du moteur au hélices.
Les différents matériaux utiliser :
Les différentes types de matériaux utiliser sont du plastique sous différentes forme. L’utilisation du plastique s ‘explique grâce a a son poids nettement inférieur au poids du metal. Cependant le drone est consolider par du polystyrène car c’est un matériaux léger et absorbeur de choc, le plastique étant un matériaux plus fragile. La batterie dans le drone ne peut être dans en plastique car une batterie ne peut etre en plastique.
Comme amélioration techniques on pourrait très bien proposer:
Le drone pourrait être autonome et il pourrait nous suivre en autonomie.
Le drone pourrait être télécommandable par des lunettes pour donner une ascension de vol
Il pourrait avoir une fonction de transport. Le drone pourrait nous transporter.
Elie B. Augustin L.S. Melvin A.