Dans cet article je vais vous présenter le protocole expérimental que nous avons utilisé en TP pour analyser puis décrire le comportement du robot tondeur RL 500.
mise en tension du robot tondeur
Analyse des différentes commandes pour actionner les moteurs du robot
a l’aide d’un oscilloscope nous avons analyser la variation de tension selon la vitesse http://www.youtube.com/watch?v=LF4-tDvCvZg
Études des différentes entrées/sorties
Relevé de mesures et relevé des positions pour créer des chronogrammes
Relevé de nouvelles mesures sur les valeurs remarquables afin d’introduire dans les chronogrammes des événements remarquables
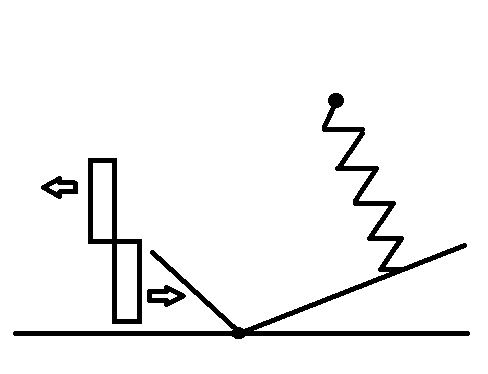
Mesures sur le mouvement de translation horizontal : sortir ou rentrer le bras
Source : LP2I
Conclusion sur le comportement du système : L’action de rentrer ou sortir le bras met 750 ms (soit 0.75 s) à s’effectuer après que l’utilisateur ait alimenter le vérin correspondant.
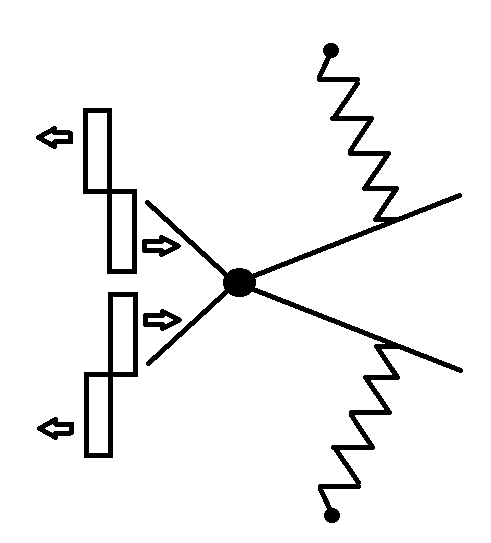
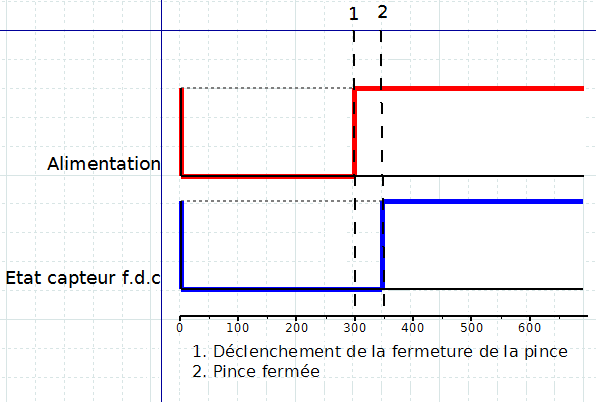
Mesures sur le mouvement de fermeture de la pince
Source : LP2I
Conclusion sur le comportement du système : La fermeture de la pince met 50 ms (soit 0.05 s) à s’effectuer après que l’utilisateur ait alimenter l’unité correspondante.
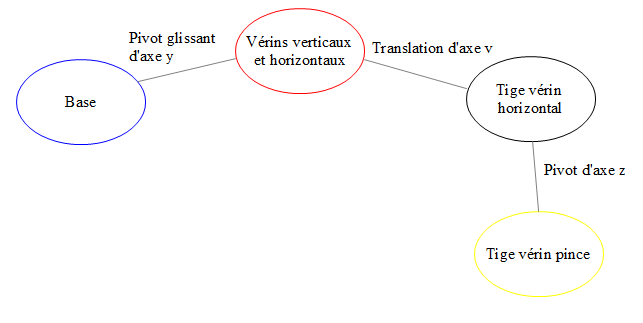
Schéma simplifié du bras manipulateur présentant les différents sous-ensembles cinématiques :
Pour savoir si le bol est ouvert ou fermé, il existe deux capteurs, qui analyse cette fonction logique, en bout de course ou en fin de course.
Le capteur 1 (fin de course haut), indique si le bol est ouvert ou n’est pas ouvert et le capteur 2 (fin de course bas), quant à lui indique si le malaxeur est fermé ou n’est pas fermé.
Comportement des capteurs fin de course
A noter que si l’on oppose une résistance à l’ouverture ou à la fermeture, le système ne s’arrête pas, mais ne force pas.
Mais il existe aussi une fonction “maintenance” qui permet à l’utilisateur de choisir l’angle d’ouverture, car en temps normal, le bol s’ouvre ou se ferme entièrement.
Le fonctionnement de l’ouverture et fermeture du bol est représenté par les chronogrammes qui suivent (A savoir qu’il existe un capteur position pâle qui doit être actif pour qu’il soit possible d’effectuer les différentes actions) :
MODE NORMAL
Différentes observations :
– Lorsqu’on actionne la commande ouvrir Il faut 3secondes pour passer de la position «fermer » à la position « ouvrir » . Et inversement pour la commande fermer.
– L’ensemble des informations sont des données logiques.
MODE MAINTENANCE : Différentes observations :
-Le mode maintenace permet une ouverture, avec un angle choisi. Quel que soit sa position, mis à part si la sécurité de la lame est activée, on pourra décider d’ouvrir ou de fermer le bol et l’arrêter quand on veut
Problématique: Comment permettre un fonctionnement automatique tout en assurant un comportement sûr pour le matériel et les personnes ?
Entrées
Avance du robot
Recule
Gauche
Droite
Vitesse
stop
Sorties
Moteur droit avance
Moteur droit recule
Moteur gauche avance
Moteur gauche recule
Le robot tondeur possède deux vitesses. Nous pouvons choisir celui désiré en cliquant sur un bouton de la console. Ces vitesses ont des moyennes d’à peu près 22 et 37 tours/min (analysé sur un oscilloscope).
Manuellement (seul mode possible dans notre cas) pour faire avancer le robot nous appuyons sur la flèche qui pointe vers le haut. Pour faire arrêter les roues, il suffit soit d’enlever son doigt, soit d’appuyer et de relâcher le bouton stop.
Le moteur reçoit des signaux logiques, car elles sont les plus simples : il est soit allumé soit éteint, soit en marche avant soit en marche arrière.
Dans le tableau ci-dessous, nous pouvons observer comment les deux moteurs font tourner le robot.
Avance
Recule
Gauche
Droite
Moteur 1
1
2
2
1
Moteur 2
1
2
1
2
1=On marche avant, 2=On marche arrière.
Nous allons analyser de plus près comment le robot fait pour tourner à droite.
Nous avons une entrée de l’utilisateur dans ce cas-ci qui indique au robot que nous voulons tourner à droite, une autre de la part de la batterie au plomb pour alimenter les moteurs. Ensuite nous avons le moteur de gauche qui avance et le moteur de droite qui recule, ce qui provoque en sortie le mouvement vers la droite.
Nous avons aussi travaillé sur une table de vérité :
Avance
Recule
Gauche
Droite
Stop
Moteur droit avance
Moteur droit recule
Moteur gauche avance
Moteur gauche recule
État du robot
1
0
0
0
0
1
0
1
0
Avance
0
1
0
0
0
0
1
0
1
Recule
0
0
1
0
0
1
0
0
1
Gauche
0
0
0
1
0
0
1
1
0
Droite
1
0
0
0
1
0
0
0
0
Arrêté
Un de mes partenaires a décrit les risques potentiels du système (lien), un autre a réalisé un chronogramme analysant le moteur (lien) et le dernier a décrit le protocole expérimental (lien).
Sources :
Cours de Si, site expliquant le robot tondeur (lien)
La fonction principale du bras manipulateur est d’emmener un objet d’un lieu à un autre. Cela peut paraître anodin mais il y a plusieurs risques à prendre en compte. Nous les avons distingués en deux parties.
Les risques pour le matériel ou les utilisateurs :
Un des seuls risques que l’on puisse avoir, serait avec la batterie :
Si les deux ports: c’est à dire le + et le – de la batterie sont au contact, il y a « court-circuit » !
Ce qui provoquerait une explosion.
Exemple d’un court circuit, source: LP2I
Pour finir, le risque de l’électrocution est impossible parce que la batterie ne fait que 12V et le corps humain peut aller jusqu’à environ 50V sans rien ressentir.
Ces derniers temps, on trouve de plus en plus de voitures électriques pour favoriser l’écologie et arrêter de polluer l’atmosphère. Nous voyons également en ce moment de plus en plus de voitures Hybrides. Mais un autre procédé est actuellement envisagé, c’est la voiture à l’Hydrogène.
PRINCIPE :
Imaginez une voiture 100 % électrique qui aurait une autonomie de 500 km et que vous pourriez recharger complètement en moins de 5 minutes.. Cela est maintenant possible grâce aux voitures à Hydrogène.
Le véhicule utilise de l’Hydrogène issu de l’eau qui est mélangé avec l’oxygène de l’air, dans une Pile à Combustible. On appelle cela la PAC. Cette Pile à Combustible est généralement couplée avec une batterie au lithium qui alimente un moteur électrique. Pour faire le plein d’Hydrogène, il vous suffit de trouver une borne d’Hydrogène, cela ne vous prend que 5 min pour faire un plein pour 500 km en fonction des modèles. Le seul problème, c’est qu’il n’y a pas beaucoup de bornes à Hydrogène, il n’y en a environ que 100 en France. Sinon, il n’y a pas de différence en terme de performance entre une voiture à Hydrogène et une voiture thermique. On ne peut pas en dire autant des véhicules électriques qui roulent uniquement avec des batteries au lithium.
Mais malheureusement, les voitures à Hydrogène ne seront pas accessibles avant longtemps, d’après Dan Akerson, le PDG de General Motors qui précise : “Elle est encore trop chère et ne sera pas compétitive avant 2020 ou plus”. Le marché n’est donc pas encore lancé pour ce type de voiture. Par exemple, Honda a commercialisé auprès de particuliers la FCX Clarity dans la région de Los Angeles depuis 2008. Etant donné que ce n’est, pour l’instant, que de la location, cela revient à 600$ par mois. La voiture a une autonomie de 385 km et a une vitesse de pointe de 160 km/h et un moteur de 100 kW. En 2010, Honda a réussi à en vendre 10, alors que, pour l’instant en 2012, la marque en a vendu 0.
Le prix de ces voitures est encore très élevé puisque les constructeurs n’en produisent pas encore en série, ce sont des modèles uniques. Par exemple, l’Ingénieur responsable des motorisations du futur chez Toyota, Justin Ward, a indiqué que le coût de fabrication d’une Voiture à Hydrogène était passé de 1million de dollars, il y a quelques années, à 129 000$ aujourd’hui. Et quand on l’interroge sur le prix probable de ces voitures en 2015, il a refusé de confirmer le prix de 50 000$ annoncé.
Problème : L’idée de la voiture à Hydrogène ne date pas d’Hier, mais elle avais été arrêté à cause des normes de sécurité. En effet, quand on faisait le plein d’Hydrogène, le risque était permanent, car si de l’air rentre en même temps que l’Hydrogène, cela peut provoquer des explosions. Maintenant, les constructeurs ont considérablement travaillés ce problème et le risque n’est plus trop constaté.
Pour l’instant les différences de coût freinent ce marché, mais nous pouvons espérer beaucoup de ces voitures.
Pour mieux comprendre le système utilisé dans les Voitures à Hydrogène, je vous invite à regarder cette vidéo explicative.
A l’occasion de quelques manipulations effectuée sur le bras mécanique, nous avons remarqué qu’il était incapable de saisir différentes tailles d’objet. C’est à ce problème que nous souhaitons remédier ici.
Faire varier l’écart entre les pinces permettrait de rendre le bras plus polyvalent, pouvant ainsi saisir différentes tailles d’objet. Le bras en l’état actuel est en effet incapable de saisir un objet d’une dimension légèrement inférieure ou supérieure à la taille de sa pince. Pour ce faire, il est possible de remplacer le système de pincement du bras par un système pneumatique d’écartement et de rapprochement similaire à ceux qui constituent le reste du bras. Pour être efficace, ce système devra être couplé avec un capteur de pression, situé sur les pinces, afin de ne pas écraser l’objet à saisir
Nous avons étudier au cours de notre travail les chaînes et les flux qui définissent le fonctionnement du bras manipulateur SCHRADER BELLOWS. Nous allons ici vous présenter le résultat sous forme de schéma-bloc et de tableaux de flux.
Source : LP2I
Source : LP2I
Comme on peu le voir sur ce schéma-bloc, l’architecture fonctionnelle de ce système est constitué de deux chaines : une chaîne d’information et une chaîne d’énergie. Voici les différents flux de ces deux chaînes :
La chaine d’information :
Source : LP2I
La chaine d’énergie :
Source : LP2I
Enfin, voici une petite vidéo montrant le bras en action :
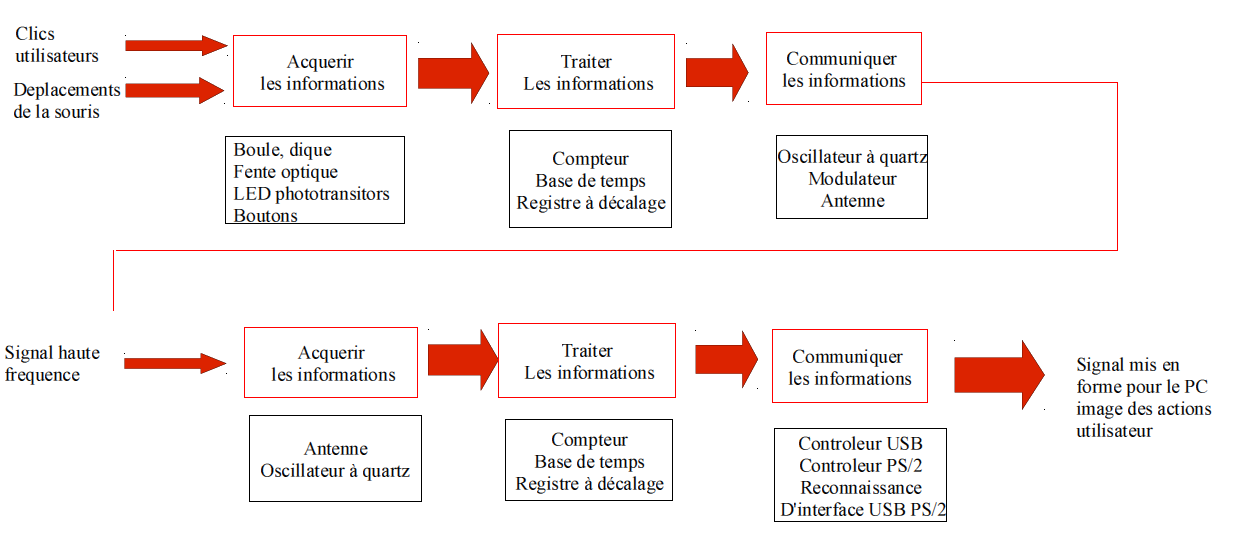
La souris sans fil est un objet assez particulier. En effet, ce système ne comporte pas de chaine d’énergie mais uniquement une chaine d’information représentée par le schéma ci-dessous Les solutions :
Cette souris est une amélioration de la souris classique. Elle permet de ne pas être gêné par un fil. La chaîne d’information de cette souris se décompose en deux partie, une partie émettrice et une partie réceptrice.
La partie émettrice est comprise dans la souris. Elle permet de coder les informations de mouvement et de les envoyer à la partie réceptrice.
La partie émettrice, elle, reçoit les informations et les traite puis les envoie à l’ordinateur qui va les traiter à son tour puis permettre à l’utilisateur de naviguer dans son PC sans avoir un fil qui traverse son bureau.
Avec mon groupe nous nous sommes demandés quelles améliorations étaient possibles pour le robot.
Après avoir analysé le robot tondeur nous avons trouvé des choses qui pourraient être améliorées. Premièrement nous avons vu que les bruits faits par le Robot aurait pu être mieux finis, ou tout simplement les enlever. Nous avons aussi vu qu’il fallait mettre un fil autour de jardin pour délimiter la surface de tonte du robot, pour remplacer ce fil nous avons pensé que le robot pourrait intégrer un Gps. Nous avons aussi pensé que pour éviter de marcher jusqu’au robot pour le programmer qu’il pourrait y avoir une application téléphone afin de le contrôler par Bluetooth.
Vidéo montrant le robot tondeur en fonctionnement.
Après quelques essais on a constaté un manque de précision dans les automatismes de la machine. Pour parer à ce problème, on a pensé à un micro-capteur qui ajusterait en fonction de la position de l’objet, la position du bras.
Schéma d’un micro-capteur Source : Clubic
Ce capteur enregistrerai les informations et les transmettrais à l’automate qui à l’aide de programme adapté pourra ajuster la position du bras mécanique et ainsi faire en sorte de diminuer les décalages. Cette innovation apporterait un nouveau flux d’information.
Mais à cette innovation il faudrait ajouter une possibilité de mouvement plus précises dans un espace restreint pour avoir des performances optimales.
Avec mon groupe nous nous sommes demandés de quels éléments le robot tondeur a-t-il besoin pour couper l’herbe ?
De l’information et de l’énergie,
Pour fonctionner, le robot a besoin d’énergie mais également d’informations importantes telles que la zone de tonte, les obstacles ou encore les commandes de l’utilisateur. Ces deux éléments forment deux flux physiques afin de mettre en rotation les lames et de mettre la tondeuse en mouvement.
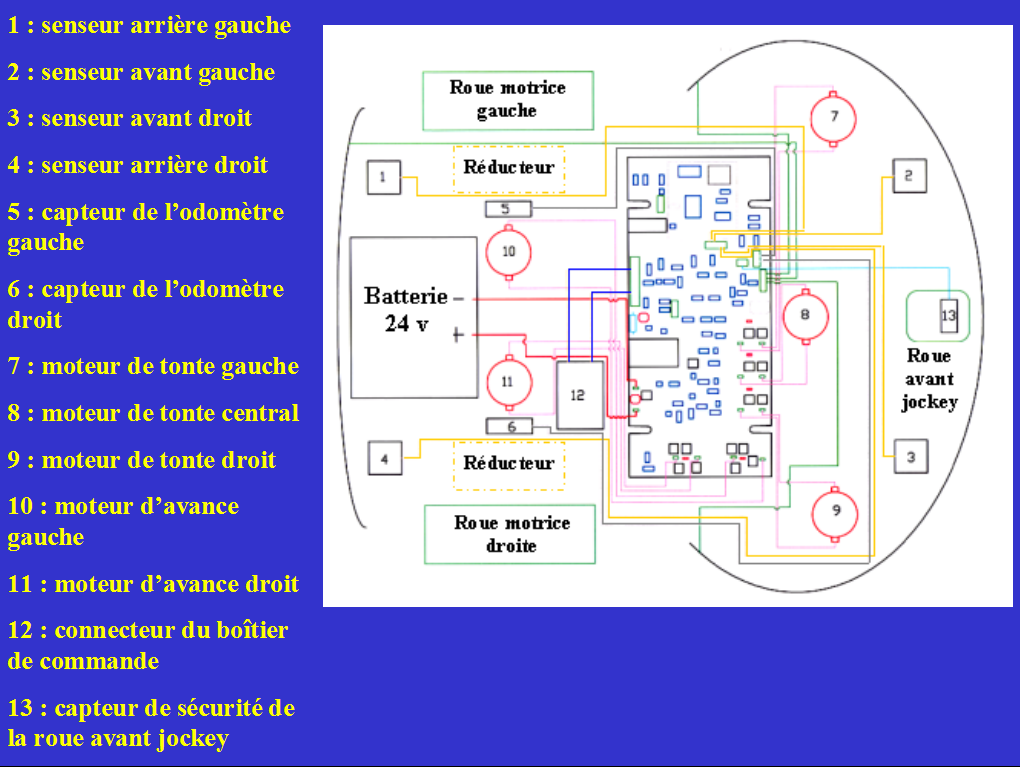
Des composants organisés.
Disposition des constituants dans le robot tondeur. Cliquer sur l’image pour l’agrandir.
Pour un bon fonctionnement, les composants doivent être organisés méthodiquement à l’intérieur du robot pour une meilleur maniabilité. Il sont ici placés comme sur l’image ci-dessus. Les roues arrières étant les roues motrice, c’est une propulsion. Tout le poids des moteurs d’avance et de la batterie est situé à l’arrière de la voiture alors que les moteurs de tonte sont eux placés sur le devant afin d’équilibrer l’ensemble.
– Relecture (au moins une fois).
– Orthographe.
– Structure de l’article (Titres, sous-titres)
– Problématique au début de l’article.
– Liens vers les sources utilisées (en donnant le nom des sites).
– Images et vidéos avec légende précise et source, exploitées dans l’article.
– Pertinence et justesse du contenu de l’aricle.
– Article à la fois synthétique et suffisamment approfondi.





 Différentes observations :
Différentes observations :




 Exemple de borne à Hydrogène Source :
Exemple de borne à Hydrogène Source : FCX Clarity de chez Honda Source :
FCX Clarity de chez Honda Source :